Автоматизация мокрого помыла сырьевых материалов. Курсовой проект. В ведение. Тут рентабильность схемы. Содержание. Введение
 Скачать 0.74 Mb. Скачать 0.74 Mb.
|

 В В ведение. ведение.Тут рентабильность схемы.  Содержание. Содержание.Введение. Технологическая часть. Специальная часть. Описание схемы контроля. Выбор аппаратов контроля и регулирования. Выбор закона регулирования расчёт параметров и настройки. Техника безопасности. Общие требования техники безопасности на производстве. Список используемой литературы. Т ехнологическая часть.Тут технология производства. Специальная часть. Описание схемы автоматизации. 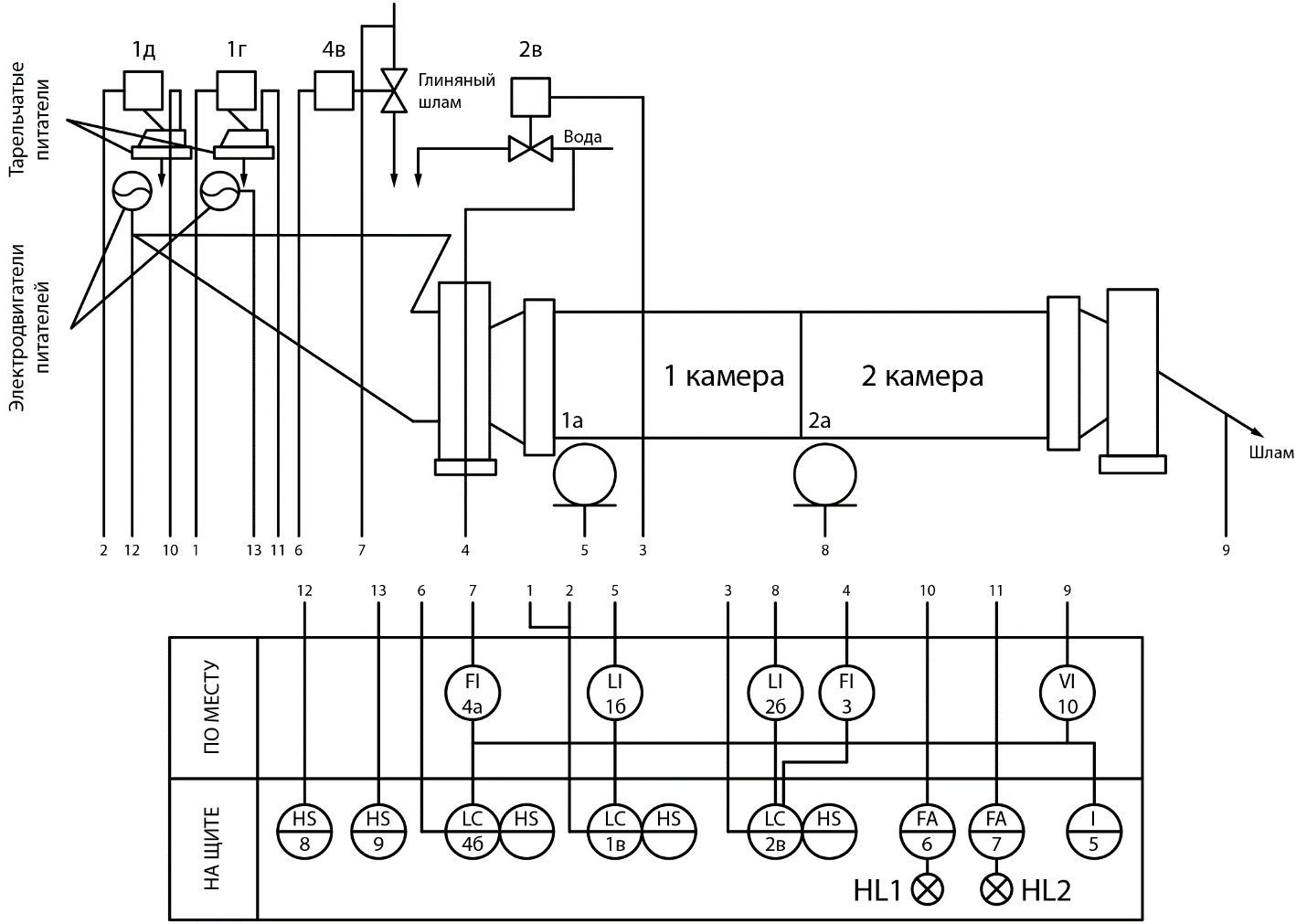 Рис. 1. Схема автоматизации. Трубная шаровая мельница. Тут должен быть принцип работы этой схемы. 2. Выбор аппаратов контроля и регулирования.2.2.1. ПДУ поплавковые датчики (сигнализаторы) уровня. 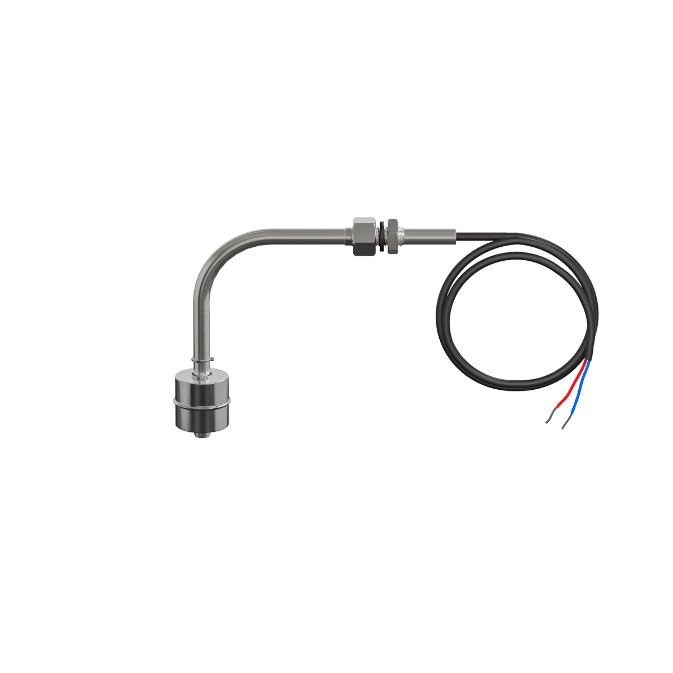 Рис. 2. Датчик уровня. Поплавковые датчики уровня ОВЕН ПДУ – устройства, предназначенные для сигнализации уровня жидкостей. ОВЕН ПДУ применяются в составе систем контроля и регулирования жидкости (воды, растворов, светлых нефтепродуктов и иных жидких сред, в том числе и агрессивных, за исключением коррозионно-активных к материалу датчика) в различных резервуарах. ОВЕН ПДУ применяются для измерения как текущего, так и предельного (максимального или минимального) уровня жидкости. Поплавковые датчики уровня имеют общепромышленные и взрывозащищенные исполнения. Поплавковые датчики уровня ОВЕН устойчивы к пене и пузырькам и могут работать с вязкими жидкостями. Для контроля уровня невязких жидкостей выпускаются датчики уровня с цилиндрическим поплавком ПДУ-1, ПДУ-2, для контроля уровня вязких жидкостей – с шарообразным поплавком ПДУ-3. По способу монтажа различают датчики с горизонтальным и вертикальным монтажом. 2.2.2. Концевые выключатели IP65 MTB4-LZ. Рис. 3. Концевые выключатели. Компактные и точные концевые выключатели в высоком пыле- и влагозащищенном исполнении (степень защиты IP65), которое позволяет использовать данную серию в тяжелых условиях (деревообрабатывающие станки, конвейеры, крановые электроприводы, лебедки, системы контроля и автоматики и другие). 2.2.3. Расходомер жидкости и газа ОВЕН РМ1.  Рис. 4. Расходомер. Расходомер РМ1 позволяет заменить применяемый для вычисления результатов измерения расхода, давления и температуры комплект аппаратуры АКЭСР (самописцы КСД, частотные сумматоры и т.д.). 2.2.4. Вискозиметр автоматический промышленный ВАП-4.  Рис. 5. Вискозиметр. Вискозиметр автоматический промышленный ВАП-4 (далее по тексту — вискозиметр) предназначен для измерения вязкости жидкостей в общем диапазоне от 20 до 200 Па·с·кг/м3 и автоматизации аналитического контроля в технологических процессах. Принцип действия вискозиметра основан на измерении периода колебаний чувствительного элемента (ротора), находящегося в анализируемой жидкости, при постоянном усилии возбуждения этих колебаний. 2.2.5. Стационарный компьютер.  Рис. 6. Компьютер. Компьютер в данной системе служит для мониторинга значений с датчиков и приборов, а также настройки заданных параметров. 2.2.6. АС4 преобразователь интерфейсов RS-485 USB c гальванической изоляцией. Рис. 7. Интерфейсный преобразователь. Предназначен для взаимного преобразования сигналов интерфейсов USB и RS-485. Позволяет подключать к промышленной информационной сети RS-485 персональный компьютер, имеющий USB-порт. Это обеспечивает простую автоматическую установку драйверов COM-порта на операционные системы Windows 7/8/8.1/10 и расширяет перечень поддерживаемых операционных систем. 2.2.7. ПКИ-3 Иволга-220 оповещатель звуковой.  Рис. 8. Сигнализация. Оповещатель звуковой ПКИ-3 предназначен для подачи звукового сигнала в системах сигнализации конвейерного и другого технологического оборудования и устанавливается внутри помещений (цехах) отапливаемого и неотапливаемого типа.2.2.8 Дифманометр-уровнемер ДНМ-160У.  Рис. 9. Дифманометр. Сильфонный дифманометр-уровнемер ДНМ-160У предназначен для контроля давления, перепада давления, уровня жидкостей и сжиженных газов (углекислота СО2, кислород О2, аргон Ar, азот N2, природный сжиженный газ и др.) в закрытых резервуарах, находящихся под давлением до 3,5 МПа. 2.2.9. ТРМ10 ПИД-регулятор с универсальным входом.  Рис. 10. ПИД-регулятор. Измеритель ПИД - регулятор ТРМ10 применяется в процессах, требующих высокую точность поддержания уставки. Благодаря универсальному входу к прибору можно подключать широкий спектр датчиков температуры, давления, влажности, расхода, уровня и т.п. ТРМ10 оснащен двумя выходными устройствами, которые могут быть: электромагнитным реле, или транзисторной оптопарой, или симисторная оптопарой, выход для управления твердотельным реле, или унифицированными аналоговым сигналом тока 4…20 мА или напряжения 0…10В. Первое выходное устройство предназначено для подключения объектов регулирования, а второй служит для обеспечения сигнализации или регистрации. Измеритель выпускается в различном исполнении корпуса: настенном Н, монтаж на Дин-рейку Д и щитовых Щ1, Щ11, Щ2. Это позволяет монтировать прибор на стену, в дверцу шкафа, на DIN- рейку. Также имеется модификация со съемным клемником, что упрощает монтаж и подключение прибора.Прибор легко настраивается благодаря наличию автонастройки ПИД-регулятора. 2.3 Выбор закона регулирования и расчет параметров настройки. Выбор типа автоматического регулятора производится с учётом свойств объекта регулирования и заданных параметров качества переходного процесса. Свойства объекта регулирования определяются, как правило, экспериментально из переходной характеристики объекта. Для построения этой характеристики на вход объекта подают возмущающее воздействие стандартного типа. На выходе объекта осуществляют запись изменения регулируемой величины во времени. Для этого технологический объект оснащают соответствующей аппаратурой для нанесения входных типовых возмущений определения ответной реакции во времени. Перед нанесением возмущения объект исследования приводят в равновесное состояние, т.е. стабилизируют технологический процесс. Если на объекте функционирует система управления, - её размыкают. Возмущение наносят в зависимости от конструктивных особенностей резким перемещением исполнительного механизма или непосредственно регулирующим органом. При этом отмечают величину и момент нанесения возмущения. Изменение выходной величины регистрируют до тех пор, пока она не примет нового установившегося значения или пока скорость изменения выходной величины не станет постоянной. Если есть опасность того, что ступенчатое возмущающее воздействие приведёт к нарушению нормального режима работы объекта вследствие отклонения регулируемой величины от допустимых значений, снимают импульсную переходную характеристику. Для этого на вход объекта последовательно наносят импульсное возмущение в виде двухступенчатых возмущений, равных по величине, но противоположных по направлению, с постоянным временным интервалом. Изменение выходной величины регистрируется до тех пор, пока скорость её изменения не станет равной нулю. При этом выходная величина может принять то же значение, что и до нанесения возмущения (объект устойчивый) или другое значение (объект нейтральный). Для получения достоверной переходной характеристики, исключающей влияние возможных помех, эксперимент повторяют несколько раз, а результат усредняют. По полученным точкам строят кривую разгона.По динамической характеристике объекта находят величины T и Т0 по которым определяют характер действия регулятора. Выбор регулятора производят с учётом динамических параметров, характеризующих объект регулирования, для чего определяют величины максимального отклонения регулируемой величины в замкнутой системе Y1. При этом Y1 не должна превышать максимально допустимую регулируемую величину. Для устойчивых объектов величина Y1 определяется по формуле 2: Y = RдК0X0, где K0 - передаточный коэффициент объекта; X0 регулирующее воздействие, вызывающее такое же изменение регулируемой величины, как и максимальное возмущение: Rд - динамический коэффициент регулирования. Динамический коэффициент регулирования Rд характеризует степень Воздействия регулятора на объект; он определяется по формуле 3: Rд = Y1/Yо, где Y0 = K0X0 – максимальное отклонение. Продолжительность переходного процесса, или величина времени регулирования, которая зависит от характера переходного процесса. Необходимые расчёты и проверка закона регулирования: Ну И Тут Типо Расчёты Идут А Тут Типо Схемы Идут 3 . Техника безопасности.Униформа должна соответствовать требованию производства: Рубашка должна быть заправленной в штаны; Рукава должны быть закатаны; Специальные защитные очки должны быть одеты при работе; Каска должна быть всегда на голове при работе на объекте. Под техникой безопасности подразумевается комплекс мероприятий технического и организационного характера, направленных на создание безопасных условий труда и предотвращение несчастных случаев на производстве. На любом предприятии принимаются меры к тому, чтобы труд работающих был безопасным, и для осуществления этих целей выделяются большие средства. На заводах имеется специальная служба безопасности, подчиненная главному инженеру завода, разрабатывающая мероприятия, которые должны обеспечить рабочему безопасные условия работы, контролирующая состояние техники безопасности на производстве и следящая за тем, чтобы все поступающие на предприятие рабочие были обучены безопасным приемам работы. На заводах систематически проводятся мероприятия, обеспечивающие снижение травматизма и устранение возможности возникновения несчастных случаев. Мероприятия эти сводятся в основном к следующему: улучшение конструкции действующего оборудования с целью предохранения работающих от ранений; устройство новых и улучшение конструкции действующих защитных приспособлений к станкам, машинам и нагревательным установкам, устраняющим возможность травматизма. 3.1 Общие требования техники безопасности на производстве.При получении новой (незнакомой) работы требовать от мастера дополнительного инструктажа по технике безопасности. При выполнении работы нужно быть внимательным, не отвлекаться посторонними делами и разговорами и не отвлекать других. На территории завода (во дворе, здании, на подъездных путях) выполнять следующие правила: не ходить без надобности по другим цехам предприятия; быть внимательным к сигналам, подаваемым крановщиками электрокранов и водителями движущегося транспорта, выполнять их; обходить места погрузки и выгрузки и не находиться под поднятым грузом; не проходить в местах, не предназначенных для прохода, не подлезать под стоящий железнодорожный состав и не перебегать путь впереди движущегося транспорта; не переходить в неустановленных местах через конвейеры и рольганги и не подлезать под них, не заходить без разрешения за ограждения; не прикасаться к электрооборудованию, клеммам и электропроводам, арматуре общего освещения и не открывать дверец электрошкафов; не включать и не останавливать (кроме аварийных случаев) машин, станков и механизмов, работа на которых не поручена тебе администрацией твоего цеха. В случае травмирования или недомогания прекратить работу, известить об этом мастера и обратиться в медпункт. С  писок используемой литературы. писок используемой литературы.Александровская А.Н. Автоматики: Учебник для студ. учреждений сред. проф. образования. Боронихин А.С., Гризак Ю.С. Основы автоматизации производства и контрольно-измерительные приборы. Гинзбург И.Б. Автоматическое регулирование и регуляторы в промышленности строительных материалов. Дудеров И.Т., Матвеев Г.М. Общая технология силикатов. Келим Ю.М. Типовые элементы систем автоматического управления. Клюев А.С. и др. Проектирование систем автоматизации технологических процессов. Контрольно-измерительные приборы и инструменты: учебник для нач. проф. образования. Пантелеев В.Н., Прошин В.М. Основы автоматизации производства: учебник для студ. учреждений сред. проф. образования. Петрова А.М. Автоматическое управление: учебное пособие. Под ред. Кочетова - Автоматизация производственных процессов и АСУП промышленности строительных материалов. Тарбеев В.В. Прогрессивные технологические процессы при производстве полированного стекла на Борском стекольном заводе. Шишмарев В.Ю. Средства измерений: учебник для студ. учреждений сред. проф. образования. Преображенский В.П. Теплотехнические измерения и приборы: Учебник для вузов по специальности "Автоматизация теплоэнергетических процессов". Мартяков А.И. Автоматизация технологических процессов и производств. Основы профессиональной деятельности. Схиртладзе А.Г. Автоматизация технологических процессов и производств: Учебник. |