Рисунок 4.2
Снять показания приборов PV1 и PA1. При необходимости переключить диапазон измерения тока прибора PA1на 1мАтумблером SA13вниз.
Выключить тумблер SA1.
Вернуть переключатели ЛАТРав начальное состояние «0»(в крайне левое положение «0»).
R1
Собрать схему, представленную на рисунке4.3.В качестве неизвестного сопротивления малой величины будет использован резистор R2 в положении 10тумблера 1х1блокаR2(10Ом).
Рисунок 4.3
Установить тумблер SA10вверх, SA12вверх.
Включить тумблер SA1.
Постепенно увеличивая напряжение ЛАТРом,установить величину тока не более
100мА, (контролировать по прибору PA3).
Снять показания приборов PV1 и PA1. При необходимости переключить диапазон измерения тока прибора PA1 на 0,1А тумблером SA13 в среднее положение, а диапазон напряжения в положении 1Втумблером SA11 в нижнее положение.
!Напряжение на выходе ЛАТРа регулируется двумя переключателями: Грубое регулирование: левый переключатель – с шагом 10В (от 0 до 40 В) Точное регулирование: правый переключатель – с шагом 1÷2В (от 0 до 10 В).
!ПридвижениистрелкиприбораPA1илиPV1вобратнуюсторону,необходимопереключитьтумблерSA10илиSA12соответственнодляизменения полярностиподключенияприбораPA1илиPV1.
Выключить стенд в следующем порядке:
Выключить тумблер SA1;
Выключить стенд автоматическим выключателем QF1;
Вернуть переключатели ЛАТРав начальное состояние «0»(в крайне левое положение «0»);
Тумблер SA13в верхнее положение 0,5А(максимальный диапазон);
Тумблер SA11в верхнее положение 50В(максимальный диапазон);
Убрать все перемычки.
Вычислить по результатам измерения величины сопротивлений R2и R3по формуле:
𝑅И3M
= 𝑈𝑃𝑉1
𝐼𝑃𝐴1
Вычислить по результатам измерения абсолютную погрешность измерения
сопротивлений. Принять фактическое сопротивление R2Ф=10Ом,R3Ф=1МОм. ∆𝑅 = 𝑅 И3M − 𝑅 Φ
Вычислить относительную погрешность.
𝛾 0= ∆𝑅 · 100%  𝑅 Φ Лабораторная работа №5. Измерение параметров элементов электрических схем мостовым методом
Цельработы:
Измерение сопротивления мостовым методом.
Измерение емкости мостом Соти
Измерение индуктивности мостом Вина.
Измерение индуктивности мостом Максвелла.
Краткие теоретические сведения.
Мосты постоянного тока.
Схема моста постоянного тока (рисунке 5.1) состоит из четырех плеч (ветвей) и двух диагоналей; плечи представляют собой резисторы с сопротивлениями R1, R2, R3, и R4в одну из диагоналей включают источник питания, в другую - индикатор с двусторонней шкалой (гальванометр или микроамперметр) с внутренним сопротивлением RИ.
Ток в индикаторе IИвычисляют на основании законов Кирхгофа:
𝐼 И= 𝑈(𝑅1𝑅3−𝑅2𝑅4) 𝑅 И(𝑅 1 + 𝑅 2)(𝑅 3 + 𝑅 4) + 𝑅 1𝑅 2(𝑅 3 + 𝑅 4) + 𝑅 3𝑅 4(𝑅 1 + 𝑅 2) 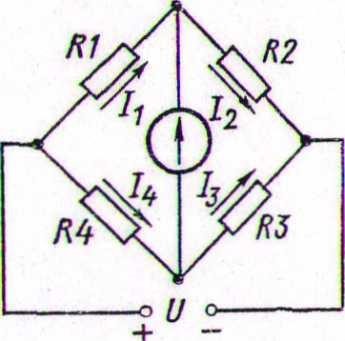 Рисунок 5.1. Схема моста постоянного тока Отсюда вытекают два возможных состояния мостовой схемы при измерениях: неуравновешенное, когда ток в индикаторе не равен нулю, и уравновешенное, когда ток в индикаторе равен нулю. В соответствии с этим мосты разделяют на две группы: одни предназначены для работы только в неуравновешенном, другие - только в уравновешенном состоянии. В неуравновешенных мостах сопротивление одного из плеч неизвестно, а остальные величины, входящие в формулу, постоянны, следовательно, величина тока индикатора IИможет служить мерой неизвестного сопротивления, т. е. такой мост является прямопоказывающим прибором. Эти мосты широко применяют для измерения неэлектрических величин электрическими методами. В уравновешенных мостах ток IИв момент отсчета равен нулю, что достигается при выполнении условия равновесия моста - равенства произведений сопротивлений противолежащих плеч: 𝑅 1𝑅 3 = 𝑅 2𝑅 4Следовательно, если сопротивления трех плеч известны, то из условия легко определяется неизвестное сопротивление четвертого плеча. Например, пусть R1=Rx,тогда 𝑋 𝑅 = 𝑅2𝑅4.Процесс уравновешивания моста постоянного тока достигается изменением либо 𝑅 3величины сопротивления одного плеча R2при постоянном отношении 𝑅 4⁄𝑅 3, либо отношения сопротивлений плеч 𝑅 4⁄𝑅 3 при постоянном значении величины R2.Практические схемы мостов выполняют так, что в процессе измерения можно изменять обе эти величины, одну плавно, а другую скачками, что позволяет значительно расширить пределы измерений. 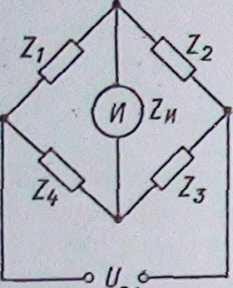 Мосты переменного тока Мосты переменного тока
Рисунок5.2Мост переменного тока.
Если в схеме моста постоянного тока (рисунок 5.1) заменить сопротивления резисторов в плечах полными сопротивлениями некоторых двухполюсников Z, то получим принципиальную схему моста переменного тока. В диагонали такого моста включают источник переменного напряжения Uи индикатор с входным сопротивлением ZИ(рисунок 5.2). В качестве источника напряжения обычно применяют генератор звуковой частоты, в качестве индикатора — телефоны, ламповые или детекторные вольтметры, избирательные усилители и нулевые индикаторы с электроннолучевой трубкой.
Ток в диагонали индикатора вычисляют по формуле, аналогичной формуле моста постоянного тока:
𝐼И
= 𝑈𝑚(𝑍1𝑍3−𝑍2𝑍4)
𝑍И(𝑍1 + 𝑍2)(𝑍3 + 𝑍4) + 𝑍1𝑍2(𝑍3 + 𝑍4) + 𝑍3𝑍4(𝑍1 + 𝑍2)
Индикаторы мостов переменного тока имеют большое входное сопротивление; напряжение на их входе определяется следующей формулой:
𝑈И
≈ 𝑈𝑚(𝑍1𝑍3−𝑍2𝑍4)
(𝑍1 + 𝑍2)(𝑍3 + 𝑍4)
Из обоих выражений следует, что равновесие моста, когда ток и напряжение в диагонали индикатора равны нулю, достигается при выполнении условия равенства произведений полных сопротивлений противоположных плеч: 𝑍 1𝑍 3 = 𝑍 2𝑍 4Это условие можно представить иначе. Подставим в формулу выражения полных сопротивлений в показательной форме, тогда получим: |𝑍 1|𝑒 j𝜑1 |𝑍 3|𝑒 j𝜑3 = |𝑍 2|𝑒 j𝜑2 |𝑍 4|𝑒 j𝜑4где |𝑍 1|, |𝑍 2|, |𝑍 3|, |𝑍 4| - модули полных сопротивлений плеч, а 𝑒 j𝜑1 , 𝑒 j𝜑2 , 𝑒 j𝜑3 , 𝑒 j𝜑4 - фазовые сдвиги между током и напряжением в соответствующих плечах. Тогда равенство распадается на два условия равновесия: |𝑍 1||𝑍 3| = |𝑍 2||𝑍 4| }𝜑 1 + 𝜑 3 = 𝜑 2 + 𝜑 4Отсюда следует, что мост переменного тока можно уравновесить регулировкой не менее двух элементов схемы с переменными параметрами, т. е. нужно добиваться равновесия по модулям и по фазам раздельно. Нужно иметь в виду, что даже при раздельных регулировках активных и реактивных составляющих изменяются одновременно и модуль и фаза, поэтому мост переменного тока можно привести в равновесие лишь последовательными приближениями. Быстрота достижения равновесия, т. е. число поочередных регулировок одного и другого параметра, определяется сходимостью моста, которая является важной характеристикой конструкции любого моста переменного тока. Второе условие равновесия моста переменного тока, требующее, чтобы суммы фазовых сдвигов противолежащих плеч были равны друг другу, определяет возможность построения схемы моста. Действительно, если в первое и третье плечи включены резисторы, то во втором и четвертом плечах должны находиться соответственно катушка индуктивности и конденсатор. Если в смежных плечах, например, в первом и втором, стоят резисторы, в остальные смежные должны быть включены одинаковые реактивные, сопротивления –
индуктивные, или емкостные. Очевидно, что во все плечи можно включать двухполюсники с сопротивлениями одинакового характера.
Схемы мостов переменного тока.

Рисунок5.3.Схемымостов:
a — мост Вина для измерения индуктивностей; б — мост Соти для измерения емкостей;
в—мостМаксвелладляизмеренияиндуктивностей
На рисунке 5.3.а представлен мост Вина для измерения индуктивностей. Два его плеча составлены из резисторов с сопротивлениями R1и R2; в третье включают измеряемую катушку индуктивности LХс сопротивлением потерь RХчетвертое плечо образовано последовательно соединенными образцовыми катушкой (LОБ, RL)И резистором RОБ
При выполнении условия равновесия получается следующее равенство:
𝑅1(𝑅𝑋 + j𝑚𝐿𝑋) = 𝑅2(𝑅OБ + 𝑅𝐿 + j𝑚𝐿OБ)
или:
𝑅1𝑅𝑋 + j𝑚𝑅1𝐿𝑋 = 𝑅2(𝑅OБ + 𝑅𝐿) + j𝑚𝑅2𝐿OБ
Приравняв вещественные и мнимые слагаемые, получим:
𝐿𝑋
= 𝑅1 𝐿
𝑅2 OБ
𝑅𝑋
= 𝑅1 (𝑅
𝑅2 OБ
+ 𝑅𝐿)
O = 𝑚𝐿𝑋 =𝑚𝐿OБ
𝑋 𝑅𝑋
𝑅OБ + 𝑅𝐿
В практических схемах мостов значение индуктивности образцовой катушки LОБобычно
постоянно; для упрощения вычислений резистор устанавливают также с неизменным значением сопротивления, равным 10n Ом (n — целое число); для получения плеча применяют магазин сопротивлений. Для определения значения RXиспользуют образцовый резистор с изменяющимся сопротивлением.
+
Аналогичный мост для измерения емкостей — мост Соти представлен на рис. 5.2.б. Потерями в образцовом конденсаторе пренебрегаем. При равновесии моста получаем равенство:
откуда: 𝑅 1(𝑅 𝑋1 j𝑚C𝑋) = 𝑅 2(𝑅 OБ+ 1 )  j𝑚C OБ
𝐶𝑋
= 𝑅1 𝐶
𝑅2 OБ
𝑅𝑋
= 𝑅1 𝑅
𝑅2 OБ
𝜑 𝑋 = 𝜑 OБЗдесь 𝜑 OБ — фазовый сдвиг не в образцовом конденсаторе, а в плече, состоящем из образцовых конденсатора с емкостью СОБи резистора с сопротивлением RОБ. Обычно интересен не угол 𝜑 𝑋, а дополняющий его до 90° так называемый угол потерь ð 𝑋= 𝜋 − 𝜑  𝑋 2 = 𝜋 − 𝜑 OБ 2
𝑡𝑔ð𝑋
= 𝑅𝑋 = 𝑅
𝑋
𝑋
𝑚C𝑋
= 𝑅OБ
𝑚COБ
= 𝑡𝑔ðOБ
Угол потерь, как правило, мал, поэтому можно считать ð𝑋 ≈ 𝑡𝑔ð𝑋, что справедливо до 10° с погрешностью, меньшей 1%.
Мосты Вина и Соти называют мостами отношения плеч, так как для определения неизвестной величины нужно располагать известной величиной отношения сопротивлений смежных плеч.
Измерение индуктивности и ее добротности можно выполнить при помощи моста Максвелла, используя образцовую емкость (рисунок 5.3.в). Здесь плечи R2и R4образуются ступенчатыми магазинами сопротивлений, а первое плечо — образцовым конденсатором с пренебрежимо малыми потерями и переменным образцовым резистором с сопротивлением RОБ.
Условие равновесия имеет вид:
или
𝑍OБ𝑍𝑋 = 𝑅2𝑅4
Откуда
𝑅OБ(𝑅 1 + j𝑚𝐶OБ𝑅OБ 𝑋
+ j𝑚𝐿𝑋
) = 𝑅2
𝑅4
𝐿𝑋 = 𝑅2𝑅4𝐶OБ
𝑅𝑋
= 𝑅2𝑅4
𝑅OБ
O𝑋
= 𝑚𝐿𝑋 = 𝑅
𝑅𝑋 OБ
𝑚𝐶OБ
Мост Максвелла называют мостом произведения плеч. Рассмотренные схемы мостов переменного тока конструктивно объединяют в универсальных мостах для измерения L, С, и R, в которых путем переключений можно получить нужную схему, в том числе и мост постоянного тока. Универсальные мосты работают на звуковых частотах, обычно 100 или 1000 Гц; при более высоких частотах резко возрастает погрешность из-за паразитных емкостных связей между элементами моста, между элементами и землей и между мостом и оператором. Величина этих связей непостоянна, и потому результаты измерений не повторяются. Для уменьшения емкостных связей применяют электростатическое экранирование всех частей моста и монтажных проводов. Часть 5.1. Измерение сопротивления мостовым методом. Порядок выполнения
Собрать схемы, представленные на рисунке5.3ирисунке5.4.
Включить компьютер и запустить программу «DiSco».
Настройте первый канал осциллографа и запустите его в режиме много кратного запуска.
Перед включением стенда убедится, что все остальные переключатели находятся в начальном положении (выключены).
Включить стенд автоматическим выключателем QF1.
По осциллограмме в программе «DiSco» задайте выходной сигнал генератора (с помощью органов управления генератором R20, R21и SA19) со следующими параметрами: Форма:Постоянный сигнал;Смещение 10 В.
Для формирования постоянного сигналаамплитудой 10В частотой 0 кГцсмещенного на 0Вотносительно нуля.
Установите резистор R19в максимальное значение 100 Ом.
Установите резистор R17в максимальное положение 1 кОм.
Рисунок 5.3.
Рисунок5.4.
Изменяя значение сопротивления R2 добиться показания прибором PV3 близкогокнулюзначения.
Значение сопротивления R2 изменяется галетными переключателями 1x1000, 1x100, 1x10, 1x1 в следующем виде: R2=1000∙n1x1000+100∙n1x100+10∙n1x10+n1x1 Ом соответственно для каждого переключателя, где n – положение каждого переключателя соответственно.
Не меняя номиналов резисторов, остановить программу «DiSco»,записать значение резисторов R2,R17,R18,R19.
Выключить стенд в следующем порядке:
Выключить стенд автоматическим выключателем QF1;
Вернуть переключатели резисторов R2,R17,R19в начальное состояние «0»;
Убрать все перемычки.
Рассчитать неизвестное сопротивление по формуле:
где R18=200Ом.
𝑅𝑋
= 𝑅2(𝑅18+𝑅19)
𝑅17
вычислить по результатам измерения абсолютную погрешность измерения сопротивления. Принять фактическое сопротивление RXФАКТ=1300Ом.
∆𝑅 = 𝑅𝑋 И3M − 𝑅𝑋 ΦAKT
Вычислить относительную погрешность.
𝛾 0= ∆𝑅  𝑅 𝑅𝑋ΦAKT · 100% Часть 5.2. Измерение емкости мостом Соти. Порядок выполнения
Собрать схемы, представленные на рисунке5.3ирисунке5.5.
Рисунок 5.5
Включить компьютер и запустить программу «DiSco».
Настройте первый канал осциллографа и запустите его в режиме много кратного запуска.
Перед включением стенда убедится, что все остальные переключатели находятся в начальном положении (выключены).
Включить стенд автоматическим выключателем QF1.
По осциллограмме в программе «DiSco» задайте выходной сигнал генератора (с помощью органов управления генератором R20, R21и SA19) со следующими параметрами: Форма:Синус;Амплитуда 10В;Смещение0В;Частота1кГц.
Установите резистор R19в максимальное значение 100Ом.
Установите резистор R17в максимальное положение 1кОм.
Изменяя значение сопротивлений R2 и R19 добиться показания прибором PV3близкого кнулюзначения.
Значение сопротивления R2 изменяется галетными переключателями 1x1000, 1x100, 1x10, 1x1 в следующем виде: R2=1000∙n1x1000+100∙n1x100+10∙n1x10+n1x1 Ом соответственно для каждого переключателя, где n – положение каждого переключателя соответственно.
Не меняя номиналов резисторов, остановить программу «DiSco»,записать значение резисторов R2,R17,R19.
Выключить стенд в следующем порядке:
Выключить стенд автоматическим выключателем QF1;
Вернуть переключатели резисторов R2,R17,R19в начальное состояние «0»;
Убрать все перемычки.
Рассчитать неизвестную емкость CXпо формуле:
𝐶𝑋
= 𝑅17 𝐶
𝑅2 13
Вычислить по результатам измерения абсолютную погрешность измерения емкости. Принять фактическую емкость СXФАКТ=1мкФ,емкость С13=4,7мкФ.
∆𝐶 = 𝐶𝑋 И3M − 𝐶𝑋 ΦAKT
Вычислить относительную погрешность.
𝛾 0= ∆𝐶  𝐶 𝐶𝑋ΦAKT · 100% Часть 5.3. Измерение индуктивности мостом Вина. Порядок выполнения
Собрать схемы, представленные на рисунке5.3ирисунке5.6.
Включить компьютер и запустить программу «DiSco».
Настройте первый канал осциллографа и запустите его в режиме много кратного запуска.
Перед включением стенда убедится, что все остальные переключатели находятся в начальном положении (выключены).
Включить стенд автоматическим выключателем QF1.
По осциллограмме в программе «DiSco» задайте выходной сигнал генератора (с помощью органов управления генератором R20, R21и SA19) со следующими параметрами: Форма:Синус;Амплитуда 10В;Смещение0В;Частота1кГц.
Установите резистор R19в максимальное значение 100Ом.
Установите резистор R17в максимальное положение 1кОм.
Изменяя значение сопротивлений R2 и R19 добиться показания прибором PV3близкого кнулюзначения.
Значение сопротивления R2 изменяется галетными переключателями 1x1000, 1x100, 1x10, 1x1 в следующем виде: R2=1000∙n1x1000+100∙n1x100+10∙n1x10+n1x1 Ом соответственно для каждого переключателя, где n – положение каждого переключателя соответственно.
Рисунок 5.6
Не меняя номиналов резисторов, остановить программу «DiSco»,записать значение резисторов R2,R17,R19.
Выключить стенд в следующем порядке:
Выключить стенд автоматическим выключателем QF1;
Вернуть переключатели резисторов R2,R17,R19в начальное состояние «0»;
Убрать все перемычки.
Рассчитать неизвестную индуктивность LXпо формуле:
𝐿𝑋
=𝑅2 𝐿
𝑅17 9
Вычислить по результатам измерения абсолютную погрешность измерения
индуктивности. Принять фактическую индуктивность LXФАКТ=10,0 мГн,индуктивность L9=5,0мГн. ∆𝐿 = 𝐿𝑋 И3M − 𝐿𝑋 ΦAKT
Вычислить относительную погрешность.
𝛾 0= ∆𝐿 𝐿𝑋ΦAKT · 100%
|
 Скачать 6 Mb.
Скачать 6 Mb.