сдпм. Введение в данной статье рассматривается разработка и целесообразность модернизации алгоритма управления контроллера (esc) для сдпм с трапецеидальной формой обратной эдс применяемого в качестве тягового электропривода винтомоторной группы.
 Скачать 275.12 Kb. Скачать 275.12 Kb.
|

|
Введение В данной статье рассматривается разработка и целесообразность модернизации алгоритма управления контроллера (ESC) для СДПМ с трапецеидальной формой обратной ЭДС применяемого в качестве тягового электропривода винтомоторной группы. Анализ и выбор оптимального алгоритма управления по различным критериям (тяга / ток, качество регулирования / стоимость и др.). 1. Актуальность темы Электропривод с вентиляторной характеристикой наиболее распространён и встречается практически везде. Даже у вас дома наверняка найдется такой механизм (куллер в ПК, кондиционеры, пылесосы). В общем случае, для данных механизмов, подходят абсолютно все типы электродвигателей, однако, наибольший интерес представляет применение синхронного двигателя с постоянными магнитами, данное утверждение обусловлено тем ,что:
С развитием полупроводниковой и микропроцессорной техники появилась возможность применять СДПМ в качестве регулируемого электропривода (с диапазоном регулирования от нулевых до ограниченных спецификацией на двигатель скоростей даже для бездатчиковых систем) ,что существенно расширило область их применения вплоть до авиамоделизма, робототехники, машиностроения. При использовании СДПМ в качестве привода винтомоторной группы ,в частности, для авиамоделизма остро стоит вопрос времени работы от АКБ который возможно решить разработкой такой системы управления ,которая позволила бы достигнуть максимума тяги при минимуме потребляемого тока. Так же система управления должна обладать робастностью т.к. на двигатель постоянно действуют возмущения различного характера ( порывы ветра, вибрации от соседних двигателей и др.). 2. Конструкции и типы СДПМ 2.1 По расположению ротора Ротор может располагатся внутри статора (Inrunner) либо снаружи (Outrunner). Двигатели с внешним ротором ,как правило, имеют меньший момент инерции. 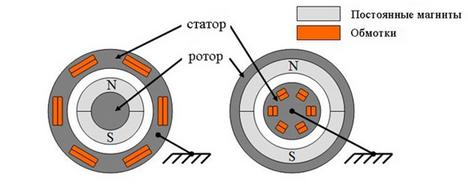 Рисунок 1 – Классификация СДПМ по расположению ротора 2.2 По конструкции ротора
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq != Ld [2]. 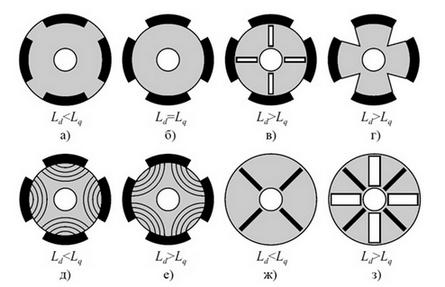 Рисунок 2 – Сечение роторов с разным отношением Ld/Lq. Черным обозначены магниты. На рисунке д, е представлены аксиально-расслоенные роторы, на рисунке в и з изображены роторы с барьерами. 2.3 По расположению магнитов
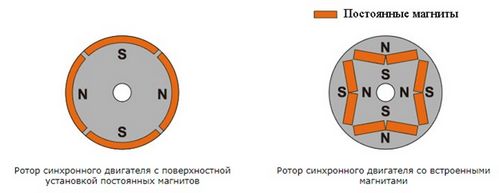 Рисунок 3 – Классификация СДПМ по расположению магнитов 2.4 По конструкции статора В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q=2,3,...,k. Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q=1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток - невозможность влияния на форму кривой ЭДС [2].  Рисунок 4 – Внешние отличия сосредоточенной и распределенной обмоток СДПМ 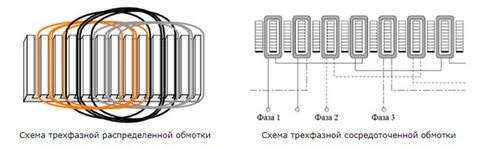 Рисунок 5 – Схемотические отличия сосредоточенной и распределенной обмоток СДПМ 2.5 По форме обратной ЭДС Форма обратной ЭДС электродвигателя может быть:
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора. Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [3]. 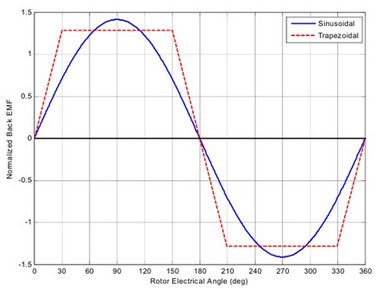 Рисунок 6 – Различия в форме обратной ЭДС СДПМ 3. Алгоритмы управления В качестве рассматриваемого двигателя принят СДПМ типа OUTRUNNER, с явно выражеными полюсами, поверхностной установкой магнитов, распределенной обмоткой и трапецеидальной формой обратной ЭДС. Подобные двигатели иногда называют бесколлекторными электродвигателями постоянного тока (БКЭПТ). Алгоритмы управления БКЭПТ/СДПМ с трапецеидальной обратной ЭДС можно разделить на:
Можно пренебрчеч формой обратной ЭДС двигателя и применить алгоритмы управления для СДПМ с синусоидальной обратной ЭДС (скалярное, полеорентированное, прямое управление моментом) при этом пульсации момента могут достигать 17% [2]. Бездатчиковое управление ,в зависимости от способа измерения обратной ЭДС можно разделить на:
При использовании СДПМ с трапецеидальной обратной ЭДС в качестве привода винтомоторной группы рекомендуется применять только бездатчиковые алгоритмы управления т.к. наличие датчиков существенно снижает надежность системы из-за тяжелых условий эксплуатации (вибрации, высокие динамические нагрузки, высокая влажность и большое количество грязи и пыли) ,что является недопустимым. Однако, алгоритм управления по датчикам Холла является наиболее наглядным для понимания физических принципов управления СДПМ и будет так же рассмотрен в качестве примера. Одним из недостатков бездатчикового управления СДПМ является проблема запуска и работы на низких скоростях когда амплитуда обратной ЭДС сопоставима с амплитудой шумов от датчиков. Стоит заметить, что для механизмов с вентиляторной нагрузкой эта проблема не критична т.к. нет необходимости развивать большой момент на нулевых и низких оборотах. Для решения этой проблемы используют следующие методы:
3.1 Управление по датчикам Холла Для оценки положения ротора в корпус двигателя встраиваются три датчика Холла. Датчики установлены под углом 120° по отношению друг к другу. С помощью данных датчиков возможно выполнить 6 различных переключений. Коммутация фаз зависит от состояния датчиков Холла. Подача напряжений питания на обмотки изменяется после изменения состояний выходов датчиков Холла. При правильном выполнении синхронизированной коммутации вращающий момент остается приблизительно постоянным и высоким. В целях упрощенного описания работы трехфазного БКЭПТ(СДПМ с трапециидальной обратной ЭДС) рассмотрим только его версию с тремя обмотками. Как было показано ранее, коммутация фаз зависит от выходных значений датчиков Холла. При корректной подаче напряжения на обмотки двигателя создается магнитное поле и инициируется вращение. Наиболее распространенным и простым способом управления коммутацией, используемый для управления БКЭПТ, является схема включения отключения, когда обмотка либо проводит ток, либо нет. В один момент времени могут быть запитаны только две обмотки, а третья остается отключенной. Подключение обмоток к шинам питания вызывает протекание электрического тока. Данный способ называется трапецеидальной коммутацией или блочной коммутацией[5]. Для управления БКЭПТ используется силовой каскад, состоящих из 3 полумостов. Схема силового каскада показана на рисунке 7 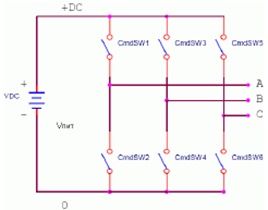 Рисунок 7 – Силовой каскад По считанным значениям датчиков Холла определяется, какие ключи должны быть замкнутыми. Таблица 1 – Коммутация ключей по часовой стрелке.
От силы магнитного поля зависит мощность и частота вращения двигателя. Регулировать частоту вращения и вращающий момент двигателя можно за счет изменения тока через обмотки. Наиболее распространенный способ управления током через обмотки является управление средним током. Для этого используется широтно импульсная модуляция (ШИМ), рабочий цикл которой определяет среднее значение напряжения на обмотках, а, следовательно, и среднее значение тока и, как следствие, частоту вращения. Скорость может регулироваться при частотах от 20 до 60 кГц. Вращающееся поле трехфазного, трехобмоточного БКЭПТ показано на рисунке 8  Рисунок 8 – Ступени коммутации и вращающееся поле (анимация:6 кадров,10 циклов,63.7 килобайт) Процесс коммутации создает вращающееся поле. На ступени 1 фаза А подключается к положительной шине питания ключом SW1, фаза В подключается к общему с помощью ключа SW4, а фаза С остается неподключенной. Фазами А и В создаются два вектора магнитного потока (показаны красной и синий стрелками, соответственно), а сумма этих двух векторов дает вектор магнитного потока статора (зеленая стрелка). После этого ротор пытается следовать магнитному потоку. Как только ротор достигает некоторого положения, в котором изменяется состояние датчиков Холла со значения 010 на 011, выполняется соответствующим образом переключение обмоток двигателя: фаза В остается незапитанной, а фаза С подключается к общему. Это приводит к генерации нового вектора магнитного потока статора (ступень 2). Если следовать схеме коммутации, показанной на рисунке 8 и в таблице 1, то получим шесть различных векторов магнитного потока, соответствующих шести ступеням коммутации. Шесть ступеней соответствуют одному обороту ротора.[5] 3.2 Управление по прямому измерению обратной ЭДС Подавляющее большинство контроллеров(ESC) для приводов винтомоторной группы работают по приведенному ниже алгоритму либо используют другой без принципиальных отличий. На рисунке 9 показаны осциллограммы трапецеидальной обратной ЭДС и соответствующие напряжения управления 3 фазным БКЭПТ. На каждой ступени коммутации, обмотка одной фазы подключается к положительному напряжению питания, другая – к отрицательному, а третья остается неподключенной. Обратная Э.Д.С. неподключенной фазы в результате пересекает ноль при пересечении среднего значения положительного и отрицательного напряжений. Пересечения ноля отмечены на рисунке 9, как ПН. Пересечение ноля возникает всегда в центре между двумя коммутациями. На постоянной скорости или медленно изменяющейся скорости период времени от одной коммутации до пересечения нуля и время от пересечения нуля до следующей коммутации равны. Это используется в качестве основы в данной реализации устройства управления без использования датчиков. 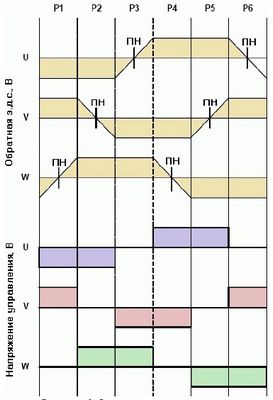 Рисунок 9 – Осциллограммы сигналов Частота вращения/вращающий момент двигателя управляются с помощью широтно импульсной модуляции (ШИМ). В целях выполнения надежных измерений в условиях излучения со стороны ШИМ повышенного уровня шума важно понимать работу ШИМ и ее взаимодействие с аналогово цифровым преобразователем. ШИМ используется в так называемом режиме фазовой коррекции. В данном режиме счетчик работает в двух направлениях, что делает выход ШИМ симметричным в пределах одного периода ШИМ. Кроме того, сравниваемое значение, которое определяет рабочий цикл ШИМ выхода, буферизуется с целью невозможности его обновления внутри цикла ШИМ. На рисунке 2 показано соотношение между значением счетчика, сравниваемым значением и ШИМ выходом. Каждый период ШИМ на рисунке выделен пунктирными линиями. На рисунке также показывается, что переполнение таймера возникает при достижении таймером ноля. Данное событие может использоваться для автоматического запуска преобразования АЦП. Если значение рабочего цикла ШИМ очень мало, то имеется точка, в которой ШИМ выход будет стабильным в течение длительного времени. Это используется в целях гарантирования оцифровки напряжения неподключенной фазы в условиях низких шумов со стороны ШИМ. 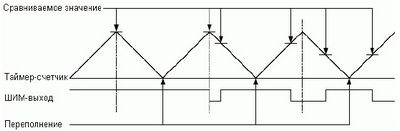 Рисунок 10 – Генерация ШИМ Пересечение ноля возникает, когда Э.Д.С. отключенной фазы пересекает уровень напряжения, равный среднему значению напряжений двух линий питания. В данных рекомендациях по применению полагается, что отрицательное питание принято за общую цепь. Это означает, что уровень пересечения ноля равен половине напряжения питания двигателя. Зависимость этого уровня от напряжения питания двигателя делает неприемлемым использование фиксированного порога для определения пересечения ноля. Вместо этого, в качестве источника опорного напряжения АЦП целесообразно использовать напряжение питания двигателя (или его отмасштабированная в направлении уменьшения версия). Перед подачей к АЦП напряжение питания двигателя необходимо отфильтровать. Для этих целей можно использовать схему ДН/ФНЧ. Коэффициент деления выбирается таким образом, чтобы выходное напряжение было в требуемых границах АЦП, между 1В и AVCC. Напряжения 3 фаз должны быть подключены к входам АЦП посредством трех схем ДН/ФНЧ. Фильтры должны иметь тот же коэффициент передачи, что и фильтр опорного напряжения АЦП. Это позволит использовать весь диапазон преобразования АЦП. Фильтр низких частот должен обеспечивать как можно более полную фильтрацию высокочастотного шума, но при этим не должен вносить существенных задержек сигнала обратной ЭДС. Чтобы понять, как реализована коммутация, полезно рассмотреть временную диаграмму событий, которые возникают между двумя коммутациями. На рисунке 11 показано в деталях осциллограмма напряжения неподключенной фазы между двумя коммутациями[6].  Рисунок 11 – Детальная временная диаграмма коммутации 3.3 Управление по косвенному измерению обратной ЭДС Так как схема прямого имерения обратной ЭДС имеет ряд недостатков:
Будет рассмотрена схема косвенного измерения ЭДС на основе интегрирования обратной ЭДС. Алгоритм косвенного определения обратной ЭДС отличается от прямого только програмной реализацией и никак не затрагивает схемотехнику ( она идентична описаной в п. 3.2.) При прямом способе измерения эдс определяется момент перехода через 0 после производится выдержка времени (timing) которая зависит от текущей скорости и индуктивности двигателя (на высокой скорости коммутацию нужно осуществлять раньше ,чтобы ток успел достигнуть максимального значения в нужный момент) после инвертор переходит к следующему состоянию. Главная проблемма данного метода в том ,что из-за приведенных выше недостатков выдержка времени зависит от скорости и подвержена влиянию шумов. Косвеный (Indirect) способ работает следущим образом:
Основное достоинство данного способа в меньшей чувствительности к шумам и адаптации к изменению скорости. Данное утверждение основано на том ,что площадь под прямой между точками пересечения нуля и уставки срабатывания (образует форму треугольника) не изменяется при разгоне / торможении, не зависит от скорости и задержка ,в электрических градусах, между определением перехода через 0 и переходом к следующему состоянию инвертора всегда постоянна. Т.к. при низкой скорости вращения ротора величина ЭДС мала и интегратор накапливает нужную величину дольше а на высокой ЭДС выше и соответственно интегратор достигает значения уставки раньше. 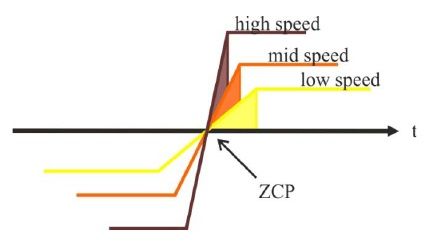 Рисунок 12 – Участки интегрирования обратной ЭДС 4. Описание аппаратной части 4.1 Силовая часть Типовая структурная схема устройства представлена на рисунке 4.1 и включает в себя следующие элементы:
Так же в устройстве ,в обязательном порядке, должны присутствовать коммуникационный интерфейс, отладочные выводы. Каждый структурный элемент имеет соответствующею схему включения, полная принципиальная схема устройства представлена в дипломной работе. 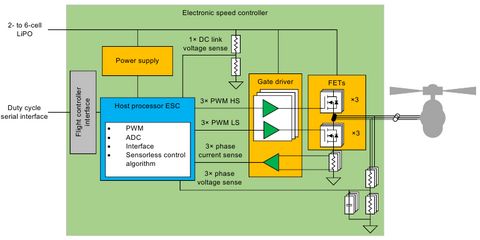 Рисунок 13 – Структурная схема контроллера 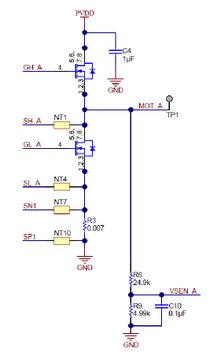 Рисунок 14 – Схема стойки инвертора 4.2 Целевая платформа В качесвте управляющего устройства для контроллера (ESC) был выбран микроконтроллер STM32F103 краткие технические характеристики которого представлены в таблице 2. Таблица 2 – Характеристики выбранного микроконтроллера.
Данный микроконтроллер был выбран в качестве целевой платформы благодаря следующим преимуществам:
Вывод Применяемые в массовом производстве контроллеры (ESC) приводов винтомоторных групп используют не оптимальные с точки зрения производимой тяги на единицу потребляемого тока и ,как следствие, с точки зрения энерго эффективности алгоритмы управления двигателями. Более того, высокие пульсации момента и тяги дополненные внешними возмущениями могут привести к потере устойчивости, лишним вибрациям и существенно усложнят задачу стабилизации мульти роторной системы. Применение алгоритмов косвенного определения обратной ЭДС либо алгоритма поле ориентированного управления позволит избавится от выше описанных недостатков либо существенно снизит их влияние на систему. Список источников
|