лаба. исправления. Задание Частотнорегулируемого электропривода переменного тока на базе двухзвенного преобразователя частоты
 Скачать 0.93 Mb. Скачать 0.93 Mb.
|

|
ОТЧЁТ по лабораторной работе №3 «Частотно-регулируемый электропривод переменного тока на базе двухзвенного преобразователя частоты» дисциплина «Моделирование электропривода» Задание 3. Частотно-регулируемого электропривода переменного тока на базе двухзвенного преобразователя частоты Исследовать в программе MatLab+Simulink частотно-регулируемый электропривод переменного тока на базе двухзвенного преобразователя частоты (ДПЧ) с векторной системой управления. 1. Асинхронный короткозамкнутый электродвигатель серии 4А выбирается в соответствии с таблицей вариантов (табл. 1). 2. Двухзвенный преобразователь частоты: - тип выпрямителя на входе – неуправляемый трехфазный мостовой с емкостным фильтром на выходе и трехфазным реактором на входе; - тип инвертора на выходе – трехфазный автономный инвертор напряжения с пространственно-векторной широтно-импульсной модуляцией (ШИМ); - устройство торможения двигателя – сливной резистор в звене постоянного тока; - источник питания – трехфазная сеть с частотой 50 Гц и фазным напряжением 220–240 В. 3. Системы регулирования скорости двигателя: - векторная с прямой ориентацией по вектору потокосцепления ротора. Система имеет два внешних контура регулирования – потокосцепления ротора ψ2Xи угловой скорости w двигателя, а также два подчиненным им внутренних контура регулирования составляющих тока статора I1Xи I1Yв осях xyортогональной системы координат, вращающейся с синхронной скоростью w0.ЭЛ поля двигателя. Для формирования постоянного ускорения при разгоне и торможении электропривода на входе используется задатчик интенсивности интегрального типа. Таблица 1
1. ФУНКЦИОНАЛЬНАЯ СХЕМА  Рисунок 1.1 – Функциональная схема с векторной системой управления II. РАСЧЕТ ОСНОВНЫХ ПАРАМЕТРОВ Таблица 2.1 – Технические данные короткозамкнутых асинхронных двигателей основного исполнения серии 4А при ПВ = 40 %, UФ.Н = 220 В, синхронная частота вращения 1500 об/мин
Продолжение таблицы 2.1
2.1 Расчет параметров асинхронного двигателя Номинальный ток статора:   Сопротивление статорных обмоток:   Индуктивность рассеяния обмотки статора:   Приведенное к обмотке статора активное сопротивление обмотки ротора:   Приведенное к обмотке статора индуктивность рассеяния обмотки ротора:   Индуктивность цепи намагничивания:   Механические потери в двигателе:   Коэффициент вязкого трения:       Суммарный момент инерции двигателя и исполнительного мех-ма:   Механическая постоянная времени двигателя учетом мех-ма:   Полные индуктивности обмоток статора и ротора:     Номинальный момент на валу:   Электромагнитный момент:   2.2 Расчет параметров преобразователя частоты Активная мощность, потребляемая преобразователем:   Полная номинальная мощность ПЧ:     Индуктивность трехфазного реактора:   Активное сопротивление трехфазного реактора на входе ПЧ:   Емкость фильтра на выходе выпрямителя при Ud=550…550 B:   Максимальная мощность торможения в звене постоянного тока ПЧ:       Максимально допустимое значение тормозного сопротивления в звене постоянного тока ПЧ:   Ud.зад=750 В – заданное напряжение в звене постоянного тока в режиме торможения. Сопротивление тормозного резистора примем:   Частота ШИМ:           Ширина петли гистерезиса регулятора напряжения РН:   III. НАСТРОЙКИ КОНТУРОВ ЭЛЕКТРОДВИГАТЕЛЯ С ВЕКТОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ 3.1 Настройка контура тока Коэффициент передачи ПЧ:   Коэффициент цепи обратной связи ДТ:   Эквивалентное активное сопротивление цепи статора:   Коэффициент электромагнитной связи ротора:   Эквивалентная индуктивность цепи статора: Коэффициент рассеяния магнитного поля АД: Электромагнитная постоянная времени статорной цепи:   Постоянная времени чистого запаздывания ПЧ:   Постоянная времени РТ:  Постоянная времени КРТ по правилу технического оптимума:   Постоянная времени И-канала РТх с учетом:   Коэффициент П-канала РТх:   Коэффициент И-канала РТх:   Из Matlab выбираем оптимальные значения коэффициентов РТх: КП.РТХ=0,5 КИРТХ = 30 Оптимальное значение постоянной времени КРТ:    Рисунок 3.1 – Переходные характеристики при оптимальном значении КП.РТ По рисунку время переходного процесса 0,002 с. ТКРТ = 0,002/(3…4)=0,6 мс. 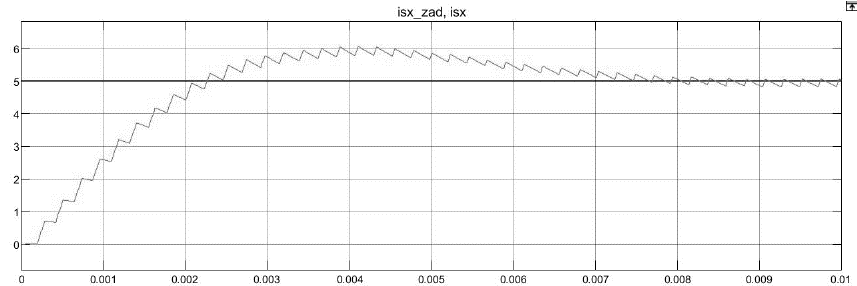 Рисунок 3.2 – Переходные характеристики при КП.РТ 0,25 от опт.  Рисунок 3.3 – Переходные характеристики КП.РТ 4 от опт. 3.2 Настройка контура потокосцепления ротора Коэффициент датчика потока:  Электромагнитная постоянная времени:   Выбираем постоянную времени РП:  Введем расчетную постоянную времени КРП:   Постоянная времени И-канала РП:   Коэффициент П-канала РП:   Коэффициент И-канала РП:   3.3 Расчет сигнала задания потокосцепления ротора: Амплитудное значение тока статора в номинальном режиме           Номинальное значение потокосцепления:   Сигнал задания потокосцепления ротора по оси Х:   Время достижения потока номинального значения:   Коэффициент перегрузки по току статора по оси Х:   Из Matlab выбираем оптимальные значения коэффициентов РП: КП.РП = 400; КИ.РП = 3000; tПП = 0,035 с.  Рисунок 3.4 – Переходный процесс регулятора потока только с П-каналом 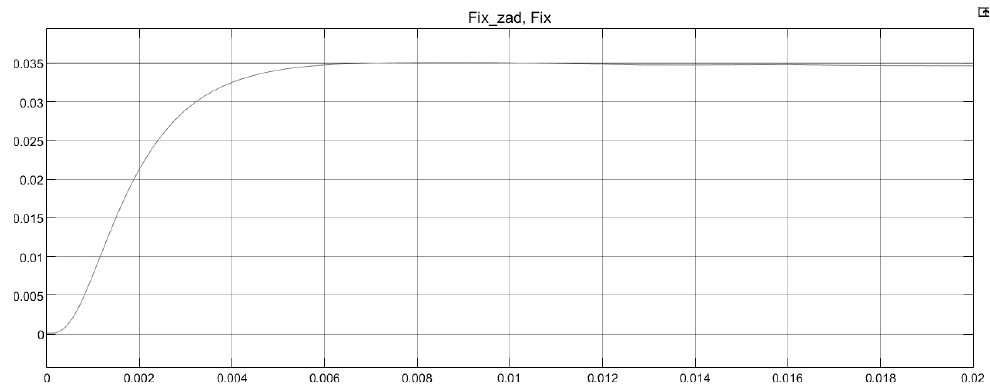 Рисунок 3.5 – Переходный процесс регулятора потока при оптимальных значениях  Рисунок 3.6 – Переходные характеристики при КП.РП 0,5 от опт. 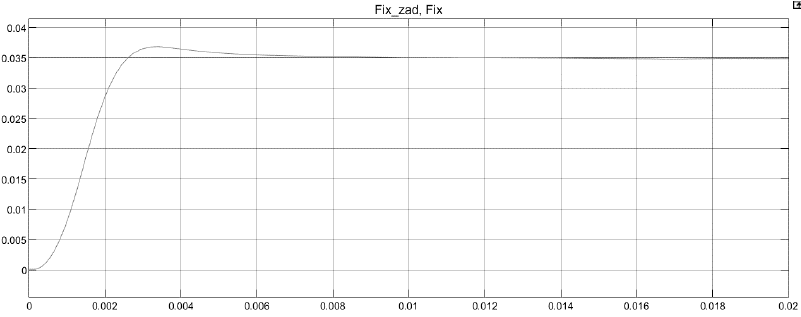 Рисунок 3.7 – Переходные характеристики при КП.РП 2 от опт.  Рисунок 3.8 – Переходные характеристики в «большом» 3.4 Настройка параметров регулятора скорости Коэффициент цепи обратной связи ДС:   Постоянная времени КРС:   Коэффициент усиления П-канала РС:   Из Matlab выбираем оптимальное значение П-канала РС: КП.РС = 5; ТКРТ = 1,5…2 мс. Оптимальное значение постоянной времени КРС   Частота среза КРС:   Расчет уставки максимального момента в БО регулятора скорости:    Номинальный сигнал задания:    Рисунок 3.9 – Переходный процесс регулятора скорости при оптимальных Значениях  Рисунок 3.10 – Переходный процесс регулятора скорости при КП.РС 0,5 от опт.  Рисунок 3.11 – Переходный процесс регулятора скорости при КП.РС 2 от опт. IV. ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ УПРАВЛЕНИЕМ 4.1 Динамические характеристики (реактивный момент)  Рисунок 4.1 – Динамические характеристики при разгоне и реверсе на холостом ходу без ЗИ 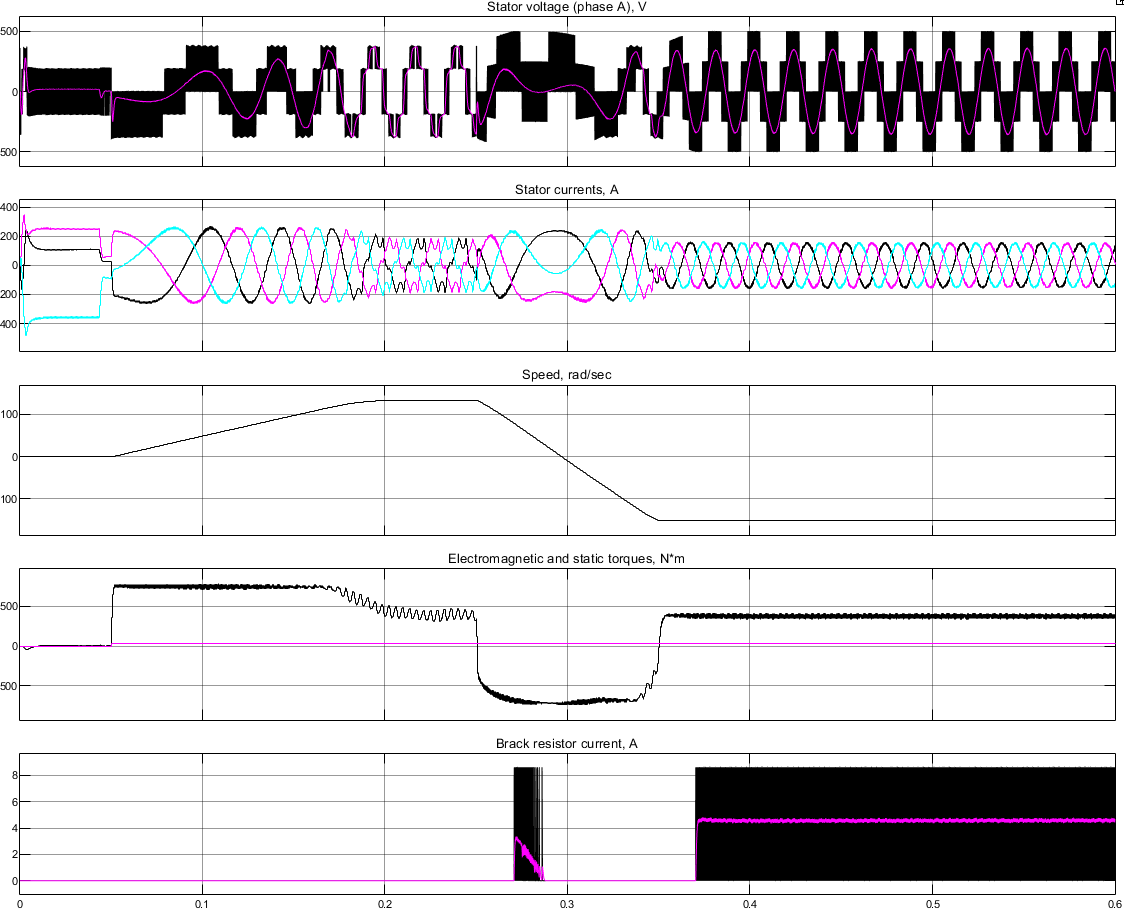 Рисунок 4.2 – Динамические характеристики при разгоне и реверсе с номинальной нагрузкой без ЗИ 4.2 Механические характеристики  Рисунок 4.3 - Механические характеристики Список литературы 1. Системы управления электроприводов: учебник для вузов / В.М. Терехов, О.И. Осипов; под. ред. В.М. Терехова. – 2-е изд., стер. – М.: Издательский центр «Академия», 2006. – 304 с. 2. Анучин, А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с. 3. Асинхронные двигатели серии 4А: Справочник / А.Э. Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская . – М.: Энергоиздат, 1982. – 504 с. 4. Герман-Галкин, С.Г. Matlab & Simulink / Проектирование механотронных систем на ПК / С.Г. Герман-Галкин. – СПб.: КОРОНА Век, 2008. – 368 с. 5. Черных, И.В. SIMULINK: среда создания инженерных приложений / И.В. Черных. – М.: ДИАЛОГ–МИФИ, 2003. – 496 с. |