Ас. двигатель
|
1. Перечислите 12 основных
конструктивных и функциональных узлов и элементов
трехфазного асинхронного двигателя с короткозамкнутым ротором
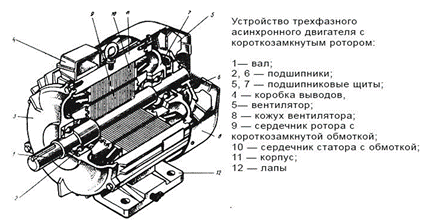
1. Вал
2. Подшипники
3. Подшипниковые щиты
4. Коробка выводов
5. Вентилятор
6. Кожух вентилятора
7. Сердечник ротора с короткозамкнутой обмоткой
8. Сердечник статора с обмоткой
9. Корпус
10. Лапы
11. Болт заземления
12. Табличка с паспортными данными «шильдик»
|
Ас. двигатель
|
2. Недостатки и достоинства АД
1. Недостатки:
Нет возможности контролировать частоту вращения ротора без потери мощности. Скорость вращения вала двигателя зависит от частоты питающей сети и от количества полюсов обмоток статора – это недостаток, когда необходимо в процессе работы менять скорость вращения.
Эффект скольжения проявляется в том, что частота вращения ротора всегда будет меньше частоты вращения поля внутри статора. Это заложено в принцип работы асинхронного двигателя и отражено в его названии. Скольжение также зависит от механической нагрузки на валу.
При отклонении напряжения питания более чем на 5% параметры двигателя могут отличаться от номинальных, а сам агрегат может перегреваться. Кроме того, при понижении напряжения падает момент электродвигателя, который квадратически зависит от напряжения.
При использовании преобразователя частоты скорость вращения меняется путем изменения величины и частоты питающего напряжения. Принципиально, что отношение напряжения к частоте должно быть константой.
Большой пусковой ток – проблема асинхронных двигателей мощностью более 10 кВт. При пуске ток может превышать номинальный в 5-8 раз и длиться несколько секунд. Из-за этого негативного эффекта мощные двигатели нежелательно подключать напрямую.
В силу электрических и механических переходных процессов в момент пуска двигатель обладает крайне низким КПД и большой реактивностью. Из-за низкого пускового момента привод может не справиться с началом вращения тяжелых механизмов. Этот же недостаток приводит к нагреву двигателя при пуске. Отсюда возникает другая проблема – ограничение количества пусков в единицу времени.
При недогрузе увеличивается показатель cos φ. При увеличении нагрузки, уменьшается момент.
2. Достоинства:
По сравнению с другими типами электродвигателей асинхронный двигатель имеет наиболее простую конструкции. С одной стороны это объясняется использованием стандартной трехфазной системы электроснабжения, с другой – принципом действия агрегата. Данная особенность обуславливает еще одно важное преимущество — невысокую цену асинхронных приводов. Среди двигателей разных типов одинаковой мощности асинхронный будет самым дешевым.
Очень простая схема запуска. Благодаря тому, что в стандартной трехфазной системе питания фазы сдвинуты на 120°, для формирования вращающегося поля не нужны дополнительные элементы и преобразования. Вращение поля внутри статора и, как следствие, вращение ротора обусловлены самой конструкцией асинхронного двигателя. Достаточно обеспечить подачу напряжения через коммутационный аппарат (контактор или пускатель), и двигатель будет работать. Скорость вращения вала практически не меняется с увеличением нагрузки. Хорошо переносит кратковременные перегрузы. Возможность подключения трёхфазных двигателей в однофазную сеть. Имеет очень высокий показатель КПД и cosφ.
Затраты на эксплуатацию асинхронного электродвигателя крайне малы, а обслуживание не представляет никаких сложностей. Нужно лишь время от время проводить чистку от пыли и по необходимости протягивать контакты подключения. При правильной установке и эксплуатации двигателя замена подшипников производится раз в 15-20 лет. Надёжность и возможность эксплуатировать практически в любых условиях.
|
Ас. двигатель
|
3. Опишите вращающееся магнитное поле
Обычно под вращающимся магнитным полем понимается магнитное поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается с постоянной угловой скоростью. Впрочем, вращающимися называют и магнитные поля магнитов, вращающихся относительно оси, не совпадающей с их осью симметрии (например, магнитные поля звезд или планет).
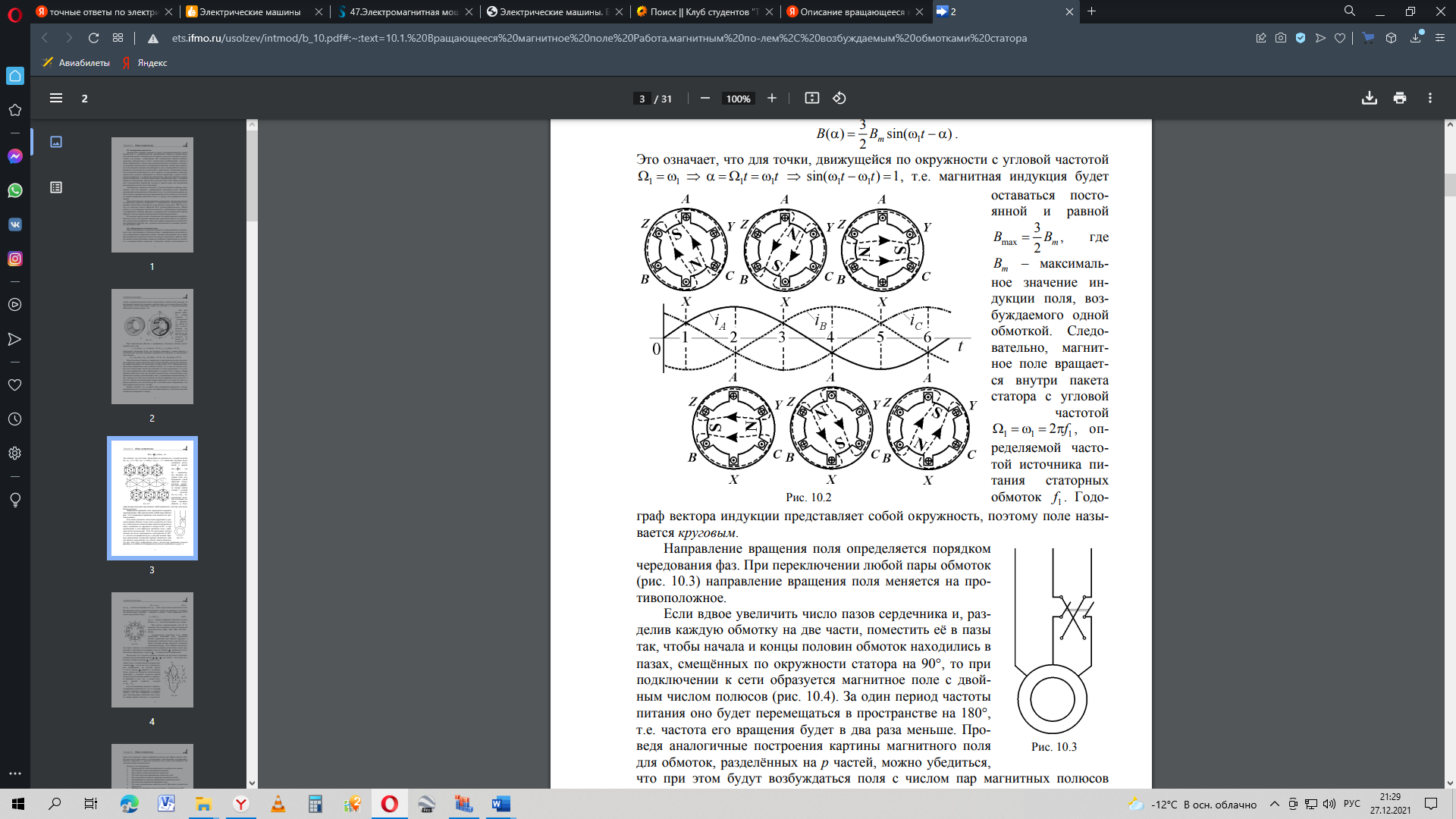
Картину вращающегося магнитного поля схематично можно проследить по нескольким точкам на рис. Обозначим положительное направление тока в обмотке знаком «+» в точке её начала и знаком «•» в точке конца. Тогда для состояния 1 в пазах сердечника A, Y и C будет одно направление тока в проводниках, а в пазах Z, B и X другое. Общая картина магнитного поля для текущего момента будет соответствовать двум
магнитным потокам, охватывающим пазы с одинаковыми направлениями токов, поэтому ось поля для состояния «1» будет направлена под углом 30° к оси AX. Такими же построениями можно определить, что через 1/6 часть периода магнитное поле сместится на 60° в положительном направлении, а за один период частоты сети – на 360°. Можно показать, что в любой точке внутренней окружности статора, смещённой на угол α относительно оси обмотки фазы A, магнитная индукция изменяется во времени. Это означает, что для точки, движущейся по окружности с угловой частотой, магнитная индукция будет оставаться постоянной и равной. Следовательно, магнитное поле вращается внутри пакета статора с угловой частотой, определяемой частотой источника питания статорных обмоток. Годограф вектора индукции представляет собой окружность, поэтому поле называется круговым.
|
Ас. двигатель
|
4. Как создается вращающееся магнитное поле?
Оси трёхфазных обмоток статора смещены в пространстве по окружности пакета на 120°, а пазы с концами обмоток (X, Y, Z) стоят от пазов, в которые уложены их начала (A, B,C) на 180°. При подключении обмоток к трёхфазному источнику питания, протекающие в них токи возбуждают магнитные поля, оси которых совпадают с осями обмоток, а максимальные значения индукции изменяются во времени по синусоидальным законам. Поля отдельных обмоток суммируются в пространстве внутри сердечника и образуют единое магнитное поле статора.
Вращающееся магнитное поле может быть создано:
• переменным током в двухфазной системе обмоток, сдвинутых в пространстве на 90°;
• трехфазным переменным током в трехфазной системе обмоток, сдвинутых в пространстве на 120°;
• постоянным током, используя преобразователь частоты, можно подключать двигатель с номинальной частотой 60 Гц (такие двигатели используются в США) к питающей сети с частотой 50 Гц. В этом случае отношение напряжение/частота должно быть установлено по-другому, т.е. 380 В/60 Гц = 6.3. переключаемым последовательно по обмоткам, распределенным по расточке статора двигателя;
• постоянным током, переключаемым с помощью коммутатора по веткам обмотки, расположенным вдоль поверхности ротора (якоря). Формирование вращающегося магнитного поля в двухфазной машине
|
Ас. двигатель
|
5. Как обеспечивается необходимая частота вращения ротора?
Обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов.
Частоту вращения ротора асинхронного двигателя можно регулировать изменением какой-либо из трех величин: скольжения, частоты тока в обмотке статора или числа полюсов в обмотке статора.
|
Ас. двигатель
|
6. В каких элементах выделяются потери в стали?
Основные потери в стали асинхронных двигателей в сердечнике статора, так как частота перемагничивания ротора, в режимах, близких к номинальному, очень мала и потери в стали ротора даже при больших индукциях незначительны.
|
Ас. двигатель
|
7. Почему сердечник ротора АД обычно выполняют шихтованным?
На каждой пластине статора либо ротора наводится напряжение в сотую, а то и в тысячную долю вольта, при этом тончайшая оксидная пленка на металле является изолятором для такого напряжения, а стало быть, в целом на пакете из пластин ЭДС и вихревые токи не возникают, что увеличивает КПД двигателя.
|
Ас. двигатель
|
8. Принцип действия двигателя
Принцип действия асинхронного двигателя основан на использовании вращающихся магнитных полей и основных законов электротехники. При включении двигателя в сеть трехфазного тока в статоре образуется постоянное по величине, но вращающееся в пространстве магнитное поле, силовые линии которого пересекают витки обмоток ротора. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
|
Ас. двигатель
|
9. К каким последствиям приводит увеличение нагрузки на валу АД?
Если нагрузка на валу машины увеличилась, т. е. возрос тормозной момент, то равновесие моментов будет нарушено, так как тормозной момент окажется больше вращающего. Скорость вращения ротора, соответственно падает. Так как разница в скоростях ротора и скорости вращения магнитного поля статора увеличилась, то увеличивается скольжение. Увеличение скольжения приводит к росту тока в статоре двигателя. Увеличение тока в статоре при неизменном напряжении — это и есть рост активной мощности.
Скорость вращения ротора будет падать до тех пор, пока электромагнитный момент не сравняется с механическим. В этой точке равновесия будет своя скорость, свой момент и своя потребляемая мощность.
|
Ас. двигатель
|
10. Почему АД создает вращающий момент только при некотором скольжении?
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, сопротивление равно нулю, что соответствует режиму короткого замыкания.
|
Ас. двигатель
|
11. Почему нельзя двигатель, рассчитанный на схему статорной обмотки «звезда», включать по схеме «треугольник»?
При включении двигателя по схеме «треугольник» рассчитанного на схему статорной обмотки «звезда» увеличится напряжение на обмотке на величину в 1,73 раза (√3). Двигатель выйдет из строя (сгорит).
|
Ас. двигатель
|
12. Какова схема замещения АД?
В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует

внесение дополнительного коэффициента c1, который представляет собой отношение напряжения, подводимого к двигателю, к ЭДС статора.

|
Ас. двигатель
|
13. Что такое коэффициент мощности и какая его величина у АД?
Коэффициент мощности (cos φ) — это отношение активной мощности к полной. Чем ближе это значение к единице, тем лучше, так как при значении cos φ = 1 — реактивная мощность равна нулю следовательно меньшая потребляемая мощность в целом.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока и коэффициент мощности возрастает, достигая наибольшего значения (0,80 - 0,90) при нагрузке, близкой к номинальной.
|
Ас. двигатель
|
14. Почему большое потребление реактивной мощности АД
является серьезным недостатком?
Недостатком является то, что активные потери на генерирование реактивной мощности для СД больше, чем для КБ, так как зависят от квадрата генерируемой мощности СД. Как правило, в системах электроснабжения промышленных предприятий КБ компенсируют реактивную мощность базисной (основной) части графиков нагрузок, а СД снижают, главным образом, пики нагрузок графика. Суммарное потребление реактивной мощности трансформаторами соизмеримо с потреблением АД, поскольку суммарная номинальная мощность Тр, как правило, во много раз больше, чем АД. Для уменьшения потребления реактивной мощности: АД выбирают двигатели с небольшим запасом по активной мощности.
|
Ас. двигатель
|
15. Чем объясняется большой пусковой ток АД?
Переменное электромагнитное поле статора наводит ЭДС в обмотке ротора двигателя. Величина этой ЭДС, в соответствии с законами электромагнитной индукции, зависит от скорости изменения электромагнитного поля статора, то есть от частоты вращения этого поля относительно ротора (от скольжения). Но если поле статора начинает вращаться сразу после подачи напряжения, то ротору необходимо какое-то время для того, чтобы разогнаться. И чем мощнее и больше двигатель, тем больше времени требуется ротору для разгона – увеличенная масса способствует инерции. Величина скольжения, в свою очередь, имеет самое большое значение именно в первый момент пуска. В этот момент скольжение равно единице, ротор еще неподвижен, а поле уже вращается с максимальной скоростью. ЭДС в роторной цепи достигает максимального значения, так же, как и ток ротора. Ток ротора тоже является переменным, поэтому он тоже создает свое переменное электромагнитное поле. Это поле опять же наводит ЭДС уже в статорной цепи двигателя. А под воздействием упомянутой ЭДС в статоре начинает протекать дополнительная составляющая тока, компенсирующая МДС ротора. Таким образом, ток в статоре всегда складывается из двух сонаправленных составляющих. Величина одной составляющей обусловлена собственным сопротивлением статорной обмотки. Эта составляющая имеет постоянное значение и на идеальном холостом ходу двигателя весь статорный ток сводится только к ней. А вторая составляющая статорного тока зависит от тока в роторной цепи и своего максимума достигает в первый момент пуска двигателя, уменьшаясь до нуля по мере приближения к точке идеального холостого хода. За счет второй составляющей статорный ток двигателя и достигает таких огромных значений при пуске.
Большой пусковой ток асинхронного двигателя не обеспечивает столь же большого пускового момента потому, что момент двигателя создается только активной составляющей тока ротора, то есть той составляющей, которая совпадает по фазе с роторной ЭДС. А соотношение активного и реактивного тока ротора зависит, прежде всего, от частоты ЭДС, наводимой в роторной обмотке. Чем выше частота, тем более «переменным» становится ток и тем большее значение приобретает индуктивное сопротивление обмоток ротора. А чем больше индуктивное сопротивление роторных обмоток, тем более реактивным становится роторный ток. Максимальной частоты ЭДС ротора достигает именно в момент пуска, когда ротор неподвижен. В этот момент роторная ЭДС изменяется с частотой питающей сети – 50 герц. Впоследствии, когда двигатель выходит на рабочий участок характеристики, эта частота падает до нескольких герц, и индуктивное сопротивление обмоток перестает иметь значение, а ток ротора становится практически полностью активным.
Да, пусковой ток в роторной цепи асинхронного двигателя велик, но это преимущественно реактивный ток, он не может обеспечить большой электромеханический момент. Активный ток достигает необходимой величины только после снижения частоты ЭДС и выхода двигателя на рабочую характеристику. С этим и связаны две проблемы пуска асинхронных двигателей: ограниченный пусковой момент и, напротив, повышенный в несколько раз пусковой статорный ток. Максимальной частоты ЭДС ротора достигает именно в момент пуска, когда ротор неподвижен. В этот момент роторная ЭДС изменяется с частотой питающей сети – 50 герц. Впоследствии, когда двигатель выходит на рабочий участок характеристики, эта частота падает до нескольких герц, и индуктивное сопротивление обмоток перестает иметь значение, а ток ротора становится практически полностью активным.
|
Ас. двигатель
|
16. Чем объясняется большой ток холостого хода?
Повышенное значение тока холостого хода асинхронной машины обусловлено наличием воздушного зазора между статором и ротором.
|
Ас. двигатель
|
17. Можно ли проточить ротор с целью уменьшения его диаметра,
если ротор стал задевать статор?
Можно. Наиболее вероятными причинами задевания ротора за статор в процессе эксплуатации являются: повышенный износ или повреждение подшипников, повышенное неуравновешенное магнитное притяжение, большой размах вибрации. Характерным признаком задевания ротора за статор являются затруднение при пуске (иногда невозможность пуска), пониженная скорость вращения, шум электродвигателя низкого тона, поперечные вибрации ротора, появление дыма.
|
Ас. двигатель
|
18. Почему роторную обмотку обычно выполняют из алюминия, а не из меди?
Низкая стоимость и незначительная масса, но по электропроводности уступает конечно меди.
|
Ас. двигатель
|
19. Чем опасен групповой самозапуск асинхронных двигателей?
Самозапуском называется восстановление нормальной работы электродвигателя после кратковременного перерыва электроснабжения или глубокого снижения напряжения без вмешательства персонала.
Самозапуск происходит, как правило, при нагруженных механизмах, что может приводить к увеличению длительности разгона и повышению температуры обмоток двигателей, обусловленному увеличением тока по сравнению с его номинальными значениями;
При самозапуске двигателей в элементах сети растут токи, снижается напряжение на зажимах двигателей и соответственно уменьшается вращающий момент.
Суммарный пусковой ток группы может привести к такому снижению напряжения, при котором пусковые моменты двигателей окажутся ниже значения, обеспечивающего разгон двигателей до нормальной частоты вращения.
|
Ас. двигатель
|
20. К каким последствиям приведёт обрыв одной фазы питающего напряжения?
В нормальном трехфазном режиме во всех трех обмотках статора текут фазные токи, одинаковые по значению, но сдвинутые относительно друг друга на 120°, это создает вращающееся магнитное поле, обеспечивающее вращение ротора. В случае обрыва одной из фаз сбалансированная система нарушается и происходит перераспределение токов и напряжений, при этом в случае соединения «звездой» две обмотки оказываются включенными последовательно и по ним протекает общий ток, в третьей обмотке ток отсутствует. Магнитное поле в такой ситуации просто меняет свой знак чего для запуска электродвигателя недостаточно, такое возможно в случае подключения трехфазных двигателей «звездой» с нулевой точкой, присоединенной к нейтрали, однако успех запуска будет зависеть от величины нагрузки. Если нагрузка не обеспечивает вращения вала, это приводит к быстрому перегреву обмоток статоров за счет возрастающих пусковых токов, разрушению изоляции и выходу трехфазных двигателей из строя.
Не меньшую опасность двигателю несет отключение фазы в момент работы электродвигателя. Не зависимо от схемы подключения асинхронного двигателя в однофазном режиме ему обычно хватает крутящего момента для продолжения работы, правда в отличие от режима с трехфазным питанием скорость вращения на валу двигателя несколько падает, а его работа сопровождается характерным гулом. Работа двигателя в таком режиме часто остается незамеченной, а продолжительный нагрев работающих обмоток приводит к их перегреву с последующей поломкой двигателя. Если обрыв цепи фазы или обрыв линейного провода произошел до того, как двигатель был включен в работу, то пуск его в большинстве случаев невозможен, поскольку оставшиеся фазы создают не вращающееся, а пульсирующее магнитное поле и пусковой момент равен нулю. Исключение составляет случай, когда обрыв происходит в цепи одной из фаз обмотки статора, соединенной в «треугольник». Двигатель при этом становится не однофазным, а двухфазным со сдвигом фаз обмотки статора и их м.д.с. под углом 120°. В таком двигателе обмотка статора создает не пульсирующее, а вращающееся эллиптическое магнитное поле. Если момент сопротивления на валу невелик, то двигатель можно запустить, но он будет работать с повышенным шумом, при большом скольжении с вероятностью быстрого перегрева и опасностью выхода из строя.
|
Ас. двигатель
|
21. К каким последствиям приведёт существенное снижение напряжения, например, при удаленных к.з.?
При изменении напряжения изменяется механическая характеристика АД – зависимость его вращающего момента от скольжения или частоты вращения. С достаточной точностью можно считать, что вращающий момент двигателя пропорционален квадрату напряжения на его выводах. При снижении напряжения уменьшается вращающий момент и частота вращения ротора двигателя, так как увеличивается его скольжение. При значительном снижении напряжения на выводах двигателей, работающих с полной нагрузкой, момент сопротивления механизма может превысить вращающий момент, что приводит к “опрокидыванию” двигателя, т.е. к его остановке. В случае снижения напряжения на зажимах двигателя реактивная мощность намагничивания уменьшается (на 2 – 3 % при снижении напряжения на 1 %), при той же потребляемой мощности увеличивается ток двигателя, что вызывает перегрев изоляции. Снижение напряжения приводит также к заметному росту реактивной мощности, теряемой в реактивных сопротивлениях рассеяния АД.
|
Ас. двигатель
|
22. Можно ли включать в Российскую сеть двигатель, предназначенный для эксплуатации в США?
Электродвигатель, рассчитанный на 60 Гц (в США частота сети 60 Гц), будет успешно работать на номинальной мощности при 50 Гц, если напряжение питания будет уменьшено на 1/6. Пример, электродвигатель номинала 230/460 В, 60 Гц подключенный на «звезду» 380 В, 50 Гц будет работать вполне успешно на полную номинальную нагрузку, хотя скорость вращения и будет составлять 5/6 от номинальной.
При подключении на 50 Гц / 230В, для трехфазного асинхронного электродвигателя номинала 230/460 В, 60 Гц, следует принять коэффициент понижения мощности 0.80, 0.85 для предотвращения перегрева на частоте 50 Гц.
|
Ас. двигатель
|
23. К каким последствиям приводит работа при несимметрии питающего напряжения?
Во-первых, двигатель не может развить полный крутящий момент, поскольку противоположная направленность момента, образующегося по отрицательной последовательности, уменьшает величину крутящего момента нормального вращения магнитного поля.
Во-вторых, подшипники могут получить механические повреждения наведенными компонентами крутящего момента на частоте, двукратно превышающей частоту системы.
Сопротивление обратной последовательности электродвигателей примерно равно сопротивлению заторможенного двигателя и, следовательно, в 5 – 8 раз меньше сопротивления прямой последовательности. Поэтому даже небольшая несимметрия напряжений вызывает значительные токи обратной последовательности. Токи обратной последовательности накладываются на токи прямой последовательности и вызывают дополнительный нагрев статора и ротора (особенно массивных частей ротора), что приводит к ускоренному старению изоляции и уменьшению располагаемой мощности двигателя (уменьшению к.п.д. двигателя). Так, срок службы полностью загруженного асинхронного двигателя, работающего при несимметрии напряжения 4%, сокращается в 2 раза. При несимметрии напряжения 5% располагаемая мощность двигателя уменьшается на 5 – 10%.
|
Ас. двигатель
|
24. Приведите примеры использования асинхронных двигателей в бытовых приборах и их мощности.
Асинхронные электродвигатели маломощные переменного тока используются при производстве холодильников, вентиляторов, стиральных машин и проигрывателей. Электродвигатели серии КД (конденсаторный двигатель) являются разновидностью асинхронных электродвигателей переменного тока. В их обмотку включены конденсаторы, которые и определяют фазу сдвига тока. Электродвигатели серии КД подключаются в однофазную сеть с помощью специальных микросхем. Данная разновидность бытовых электродвигателей подразделяется на трехфазные и двухфазные, которые определяются по способу схемы подключения. Применяются электродвигатели серии КД при производстве бытовой техники небольших мощностей (магнитофоны, проигрыватели, циркуляционные насосы водных и отопительных систем, воздуходувках, дымососы отопительных систем и пр.).
| |
 Скачать 0.51 Mb.
Скачать 0.51 Mb.