|
дополн вопросы. 2. Вектормомент пары направлен перпендикулярно плоскости действия пары в такую сторону, что
-
   1. не зависит 1. не зависит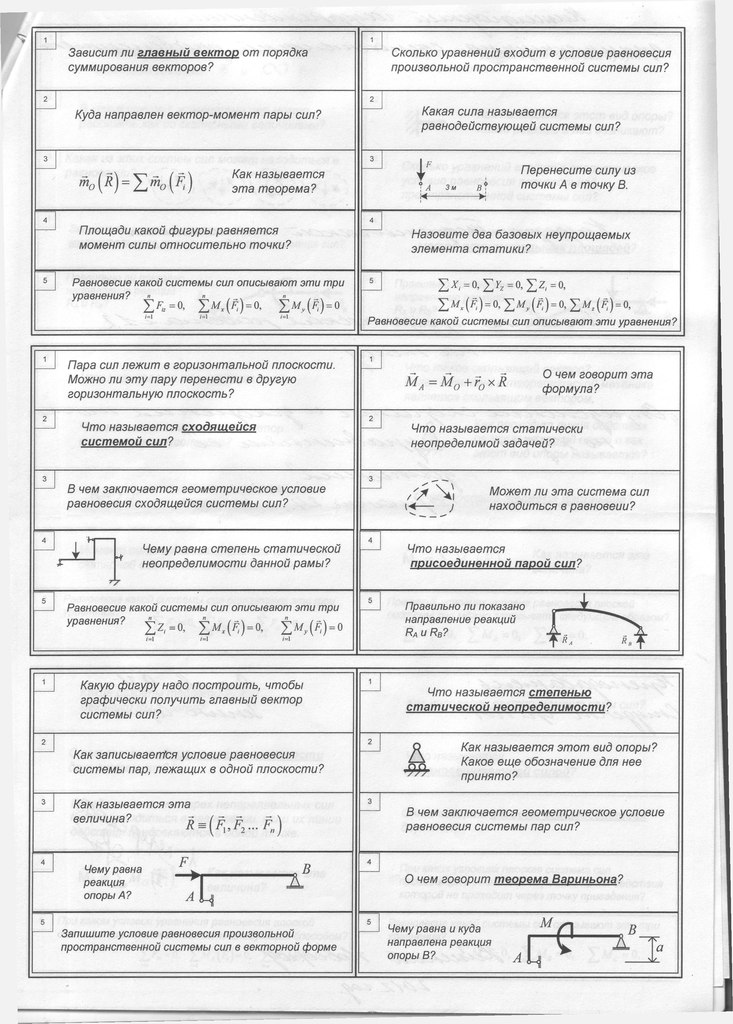
2. Вектор-момент пары направлен
перпендикулярно плоскости действия пары в такую сторону, что-
бы, глядя навстречу ему, видеть вращение, осуществляемое парой,
происходящим против часовой стрелки.
3. ТЕОРЕМА ВАРИНЬОНА:
Момент равнодействующей системы сил относительно любой точ-
ки или оси равен сумме моментов всех сил системы относительно
этой точки или оси.
4. модуль момента силы равен удвоенной площади треугольника, для которого сила является основанием, а плечо высотой.
5.Уравнения равновесия для плоской системы сил 2 форма.
|
1.6
2. Одна сила, эквивалентная некоторой системе сил, называется ее равнодействующей
3.будет такая же сила F и момент M= 3*F
4. Сила и пара сил представляют собой два базовых неупрощаемых
элемента статики.
5.Равновесие произвольной пространственной системы сил
|
1. Да. Пару можно переносить на параллельную плоскость действия.
2. Сходящейся системой сил называются совокупность сил, линии действия которых пересекаются в одной точке − точке схода.
3. В геометрической форме: силовой многоугольник должен быть замкнут.
4. ???????2??????
5. равновесие плоской системы сил 2 форма
|
1. Меняется центр приведения, переносится из точки О в точку А, в следствие с этим меняется и главный момент.
2. Задача, в которой число неизвестных реакций больше, чем число уравнений равновесия, называется статически неопределимой.
3. Да, силовой треугольник может быть замкнут
4.Добавляемая пара сил при параллельном переносе силы по лемме Пуансо называется присоединенной парой сил.
5. Да
|
1. Полученная в результате построения геометрическая фигура называется силовым многоугольником. Силовой многоугольник строится путем совмещения начала каждого следующего вектора с концом предыдущего вектора.
2. для равновесия пар сил, действующих на твердое тело в одной
плоскости, необходимо и достаточно, чтобы сумма алгебраических
моментов этих пар была равна нулю
3. Равнодействующая, главный вектор
4.-F???
5. В векторной форме: главный вектор системы сил и главный момент системы сил относительно некоторой точки должны быть равны нулю.
|
1. Разность между числом неизвестных, необходимых для расчёта заданного сооружения, и числом независимых уравнений равновесия, составленных для решения задачи, называется степенью статической неопределимости сооружения. Другими словами, эта разность определяет количество лишних связей в заданной расчётной схеме сооружения, усилия в которых требуется определить, не прибегая к уравнениям равновесия.
2. шарнирно-подвижная
3. В геометрической форме: многоугольник моментов пар должен быть замкнут.
4. Момент равнодействующей системы сил относительно любой точки или оси равен сумме моментов всех сил системы относительно этой точки или оси.
5.
|
|
|
-
1.знаки для обозначения эквивалентности систем сил.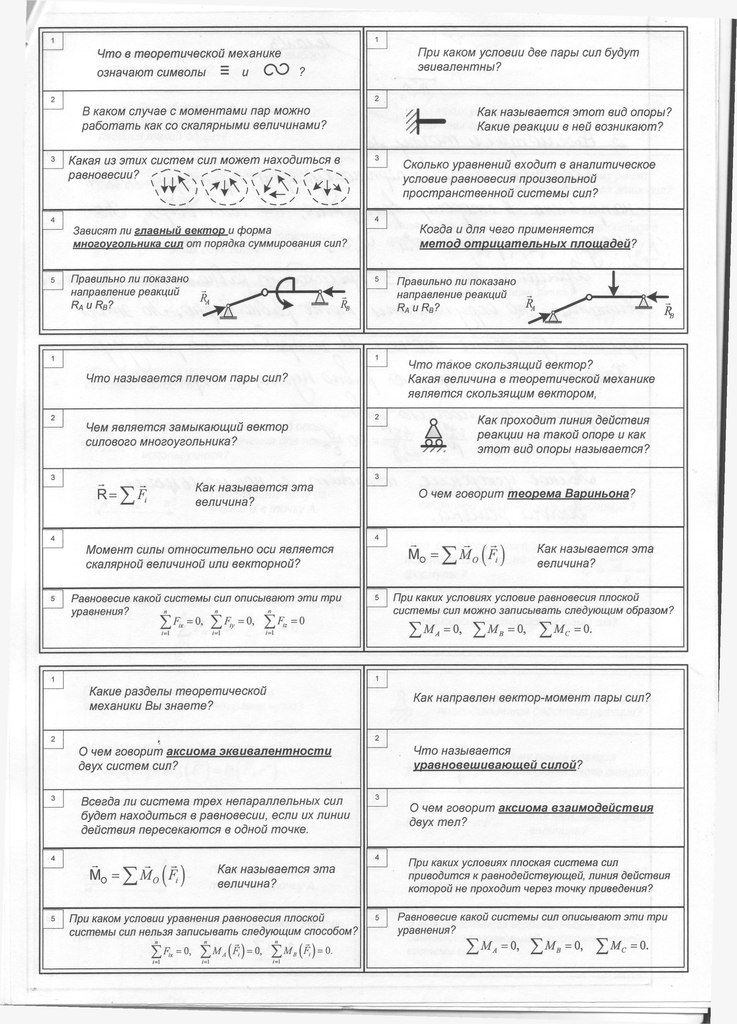
2.
3.Вторая
4.Главный вектор не зависит от порядка суммирования сил. Форма зависит.
5.RA правильно, RB неправильно ( )
|
1. Две пары, имеющие векторно-равные моменты, эквивалентны друг другу.( модули моментов пар равны)
2. Жесткая заделка препятствует любому поступательному перемещению и повороту тела. Реакция опоры и момент.
3. 6 (суммы проекций сил на каждую из координатных осей и суммы моментов сил относительно каждой из координатных осей должны быть равны нулю)
4. Этот метод применяется для нахождения центра тяжести, когда у тела имеются вырезы.
5. RA правильно, RB неправильно ( )
|
1. Расстояние между линиями действия сил пары h называется плечом пары.
2. главный вектор системы представляется замыкающим вектором многоугольника.
3.Главный вектор или равнодействующая
4. Векторной
5. Условия уравновешенности сходящейся системы сил
|
1. Скользящий вектор не связан с конкретной точкой приложения на линии ее действия. Сила(при рассмотрении тела как абсолютно твердого тела)
2.Шарнирно-подвижная. Р.С. направлена перпендикулярно опорной плоскости, т.е. вверх.
3. Момент равнодействующей системы сил относительно любой точки или оси равен сумме моментов всех сил системы относительно этой точки или оси.
4. Главный момент.
5.если эта система является системой пар
|
1. Статика — это раздел механики, в котором изучаются условия равновесия механических систем под дей-ствием сил. Кроме этого в статике рассматривают также законы, по ко-торым системы сил могут преобразовываться.
Кинематика — раздел механики, в ко-тором изучается движение материальных тел без учета определяющих его сил и масс, т. е. как движение чисто геометрических объектов.
Динамика — это раздел механики, в котором изучаются движения механических систем под действием сил. Динамика является синтезом статики и кинематики.
2. Две системы сил, отличающиеся друг от друга на уравновешенную систему сил, эквивалентны.
Это значит, что к любой системе сил можно добавить или из нее исключить уравновешенную систему сил.
Действие системы сил на тело при этом не изменится.
3. Это является необходимым условием равновесия, Достаточным условием является замкнутость силового треугольника.
4.главный момент
5. если имеются силы, неперпендикулярные оси Оу.
|
1. Вектор-момент пары направлен перпендикулярно плоскости действия пары в такую сторону, чтобы, глядя навстречу ему, видеть вращение, осуществляемое парой, происходящим против часовой стрелки.
2. Сила, которая уравновешивает систему сил. Линия ее действия совпадает с линией действия равнодействующей силы, по модулю равна равнодействующей, и противоположна с ней по направлению.
3. Принцип равенства действия и противодействия:
При всяком действии одного тела на другое силы их взаимодействия:
1) имеют общую линию действия,
2) направлены по ней в противоположные стороны и
3) равны по модулю.
4. Если главный вектор и главный момент системы не равны 0 (имеются и сила и пара), то система сил оказывается
эквивалентной одной силе R , т. е. имеет равнодействующую равную главному вектору, которая не проходит через центр приведения О
5.система пар
|
-
1. ЛЕММА ПУАНСО: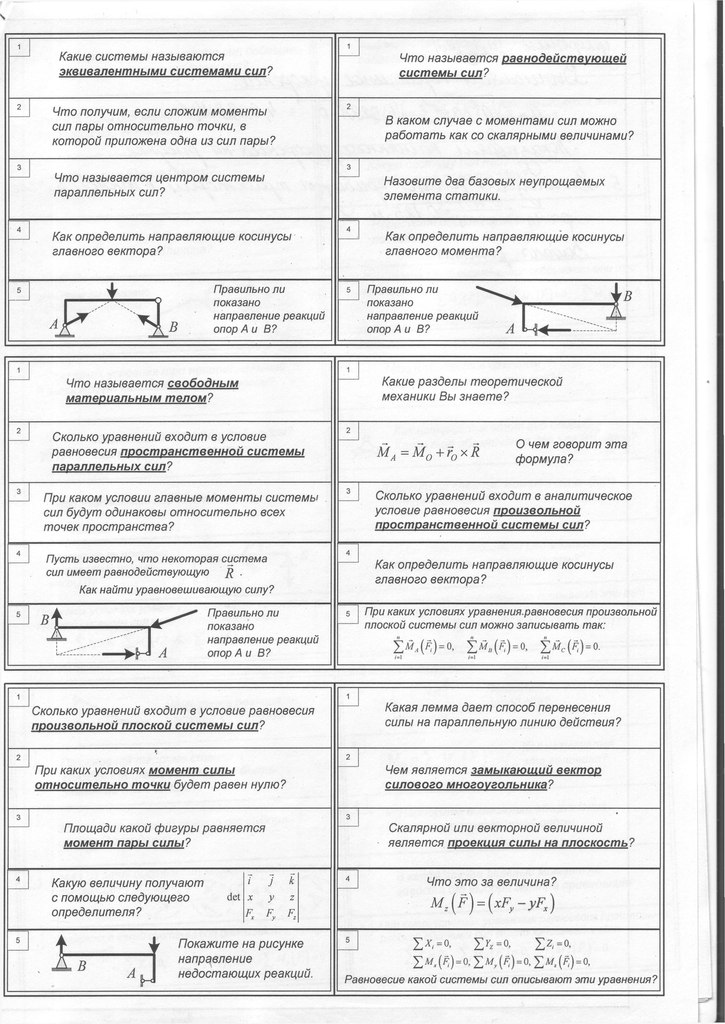
сила F может быть заменена эквивалентной ей совокупностью –
геометрически равной силой , приложенной в центре приведения, и парой сил с моментом, равным моменту силы относительно выбранного центра приведения.
2. главный вектор системы представляется замыкающим вектором многоугольника.
3.скалярная
4. Момент силы относительно координатной оси Oz, проходящей через центр О.
5.Произвольная пространственная система сил
|
1. 3 ур-ия.
2. момент силы относительно точки равен нулю только в том случае, когда ее плечо равно нулю, т. е. когда линия действия силы проходит через эту точку;
3. модуль момента силы равен удвоенной площади треугольника, для которого сила является основанием, а плечо высотой(т.е. прямоугольником)
4. Аналитическое выражение момента силы относительно точки
5. ???????????
|
1. Статика — это раздел механики, в котором изучаются условия равновесия механических систем под дей-ствием сил. Кроме этого в статике рассматривают также законы, по ко-торым системы сил могут преобразовываться.
Кинематика — раздел механики, в ко-тором изучается движение материальных тел без учета определяющих его сил и масс, т. е. как движение чисто геометрических объектов.
Динамика — это раздел механики, в котором изучаются движения механических систем под действием сил. Динамика является синтезом статики и кинематики.
2. Меняется центр приведения, переносится из точки О в точку А, в следствие с этим меняется и главный момент.
3. 6 (суммы проекций сил на каждую из координатных осей и суммы моментов сил относительно каждой из координатных осей должны быть равны нулю)
4.  ; ; 
5. если эта система является системой пар
|
1. Материальное тело может рассматриваться как механическая система, образованная непрерывной совокупностью материальных точек. Оно называется свободным, если его перемещение ничем не ограничивается.
2.3(сумма сил, и 2 суммы моментов)
3. Если для некоторого главный вектор системы равны нулю,
то главный момент для всех точек пространства будет одинаков.
4.она равна -R
5.да
| |
|
|
 Скачать 0.56 Mb.
Скачать 0.56 Mb.