ответы на билеты. Асу тп автоматизированная система управления технологическим процессом
 Скачать 1.24 Mb. Скачать 1.24 Mb.
|

|
1. Основные задачи АСУ ТП, определение АСУ ТП. АСУ ТП - Автоматизированная система управления технологическим процессом - группа решений технических и программных средств, предназначенных для автоматизации управления Технологическим процессом. Может иметь связь с более общей автоматизированной системой управления предприятием. предназначена для: Целевого применения как законченное изделие под определенный объект автоматизации; Стабилизации заданных режимов технологического процесса путем измерения значений технологических параметров, их обработки, визуального представления, и выдачи управляющих воздействий в режиме реального времени на исполнительные механизмы, как в автоматическом режиме, так и в результате действий технолога-оператора; Анализа состояния технологического процесса, выявление предаварийных ситуаций и предотвращение аварий путем переключения технологических узлов в безопасное состояние, как в автоматическом режиме, так и по инициативе оперативного персонала; Обеспечения административно-технического персонала завода необходимой информацией с технологического процесса для решения задач контроля, учета, анализа, планирования и управления производственной деятельностью. Целями создания АСУТП являются: Обеспечение надежной и безаварийной работы производства; Стабилизация эксплуатационных показателей технологического оборудования и режимных параметров технологического процесса; Увеличение выхода товарной продукции; Уменьшение материальных и энергетических затрат; Снижение непроизводительных потерь человеческих, материально - технических и топливно-энергетических ресурсов, сокращение эксплуатационных расходов; Выбор рациональных технологических режимов с учетом показаний промышленных анализаторов, установленных на потоках, и оперативной корректировки стратегии управления по данным лабораторных анализов; Улучшение качественных показателей конечной продукции; Предотвращение аварийных ситуаций; Автоматическая и автоматизированная диагностика оборудования АСУТП. (МБ)АСУ ТП – автоматизированная система управления технологическими процессами, представляет собой набор программного обеспечения и технических средств, необходимых для создания автоматической системы управления производственными процессами. Внедрение систем автоматизированного управления обеспечивает: повышение конкурентоспособности предприятия и позволяет реализовать следующие задачи: повышение производительности; повышение качества продукции (за счет исключение человеческого фактора); снижение расхода сырья; снижение производственных затрат; снижение износа производственного оборудования. 2)  Нижний уровень. Уровень оборудования (входов/выходов- Input/Output-level). Это уровень датчиков(sensors), измерительных устройств, контролирующих управляемые параметры, а также исполнительных устройств (actuators), воздействующих на эти параметры процесса, для приведение их в соответствие с заданием. На этом уровне осуществляется согласование сигналов датчиков с входами устройства управления, а вырабатываемых команд с исполнительными устройствами. Средний уровень. Уровень управления оборудованием-Control level. Это уровень контроллеров (ПЛК-PLC, Programable Logic Controller). ПЛК получает информацию с контрольно-измерительного оборудования и датчиков о состоянии технологического процесса и выдает команды управления, в соответствии с запрограммированным алгоритмом управления, на исполнительные механизмы. Верхний уровень. Уровень промышленного сервера, сетевого оборудования, уровень операторских и диспетчерских станций. На этом уровне идет контроль хода производства: обеспечивается связь с нижними уровнями, откуда осуществляется сбор данных, визуализациия и диспетчеризациия (мониторинг) хода технилогического процесса. Это уровень HMI, SCADA. На этом уровне задействован человек, т.е. оператор (диспетчер). Он осуществляет локальный контроль технологического оборудования через так называемый человеко-машинный интерфейс (HMI - Human Machine Interface). К нему относятся: мониторы, графические панели, которые устанавливаются локально на пультах управления и шкафах автоматики. Для осуществления контроля за распределенной системой машин, механизмов и агрегатов применяется SCADA (Supervisory Control And Data Acqusition - диспетчерское управление и сбор данных) система. Эта система представляет собой порграммное обеспечение, которое настраивается и устанавливается на диспетчерских компьютерах. Она обеспечивает сбор, архивацию, визуализацию, важнейших данных от ПЛК. При получении данных система самостоятельно сравнивает их с заданными значениями управляемых параметров (уставками) и при отклонении от задания уведомляет оператора с помощью тревог(Alarms), позволяя ему предпринять необходимые действия. При этом система записывает все происходящее, включая действия оператора, обеспечивая контроль действий оператора в случае аварии или другой нештатной ситуации. Таким образом, обеспечивается персональная ответственность управляющего оператора. 3)Типичная Иерархическая структура асутп 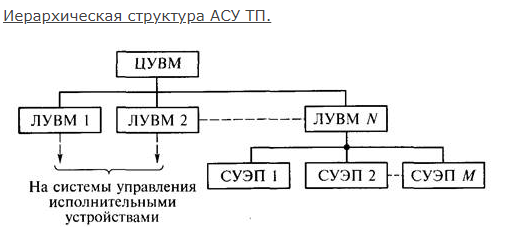 При управлении по иерархическому принципу система управления подразделяется на отдельные уровни, или ранги. Общее управление осуществляется центральной управляющей вычислительной машиной (ЦУВМ), которая считается УВМ высшего (первого) ранга. Однако ЦУВМ при иерархическом управлении управляет ТО не непосредственно, а только через промежуточные, локальные, управляющие вычислительные машины (ЛУВМ). Все ЛУВМ, управляемые непосредственно от ЦУВМ, называются УВМ второго ранга (второго уровня управления). Если имеются ЛУВМ, управляемые не от ЦУВМ, а от УВМ второго ранга, то такие ЛУВМ называются ЛУВМ третьего ранга. ЛУВМ могут строиться на базе компьютеров, программируемых логических контроллеров и микроконтроллеров в зависимости от сложности решаемых задач управления. Структура УВМ в составе АСУТП  Конструктивно УВМ выполняется в виде пульта управления (ПУ) и процессорного (системного) блока (ПБ). На рис. 1.2 показано, что УВМ управляет технологическим объектом (ТО) с параметрами У посредством управляющих сигналов X. . Через ПУ поступает исходная информация в виде управляющих программ (УП), считываемых с магнитных дисков и дискет внешнего запоминающего устройства (ВЗУ). Обмен информацией в УВМ осуществляется через стандартные устройства ввода-вывода (УВВ). Основным устройством, осуществляющим переработку поступающей информации в УВМ и выдачу управляющих сигналов, является центральный процессор (ЦП), состоящий из арифметико-логического (АЛУ) и управляющего (УУ) устройств. АЛУ осуществляет арифметическую и логическую обработку информации с выработкой управляющих сигналов, а УУ определяет, какие арифметико-логические операции и в каком порядке должно реализовать АЛУ в соответствии с заданной программой. Специфическими устройствами, отличающими УВМ от обычных ЭВМ, являются устройства связи с объектом (УСО) и модули обработки технологической информации (МОТИ). УСО — это модули прямой связи управления. Они преобразуют приходящие с процессора управляющие сигналы, чтобы согласовать их с входными цепями ТО, в то время как МОТИ преобразуют приходящие с ТО сигналы обратной связи (сигналы Y) о параметрах ТО. Основные функции модулей УСО в составе ЛУВМ: • усиление управляющих сигналов с соответствующим преобразованием их по уровню и виду; 4) Дискре́тный сигна́л — сигнал, который является прерывистым (в отличие от аналогового) и который изменяется во времени и принимает любое значение из списка возможных значений. Список возможных значений может быть непрерывным или квантованным. 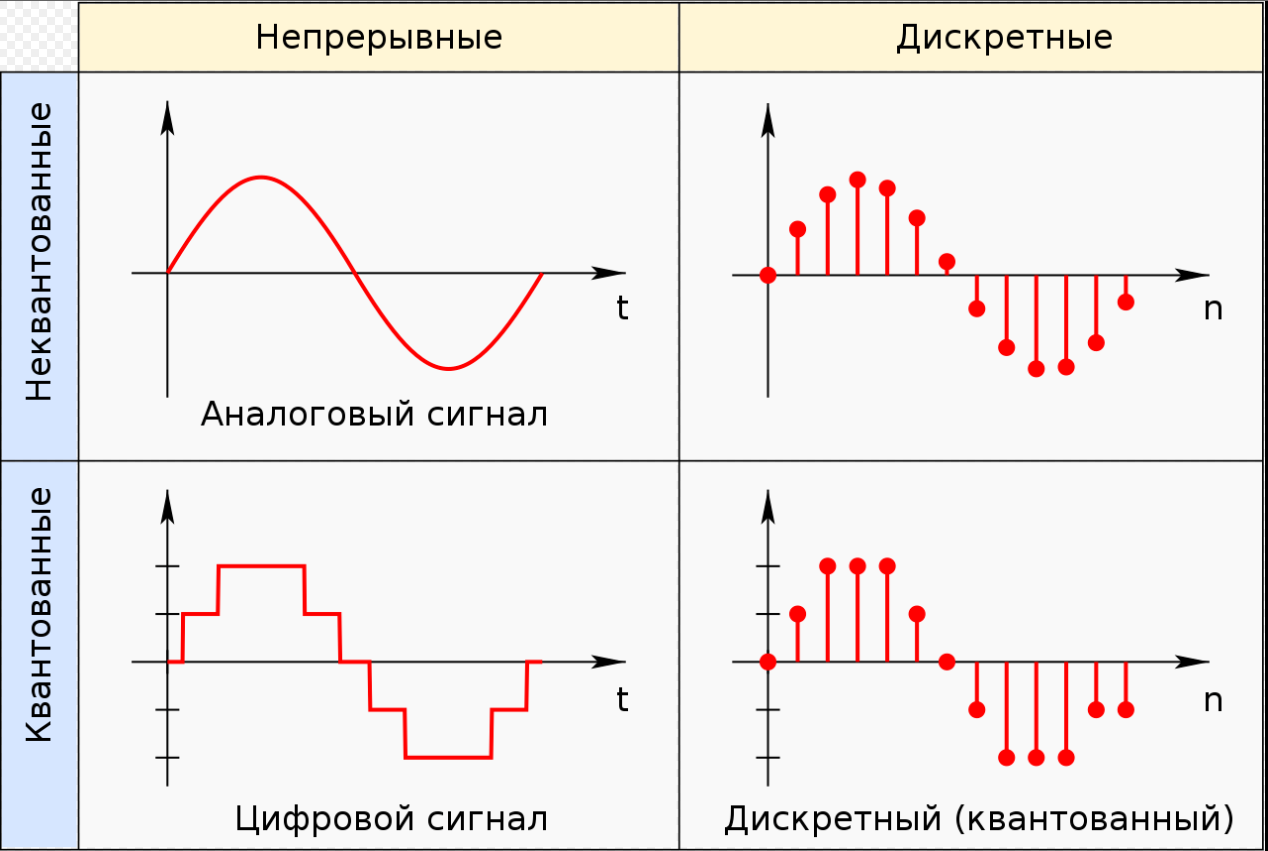 Ана́логовый сигна́л - это сигнал, порождаемый физическим процессом, параметры которого можно измерить в любой момент времени. Техническое определение аналогового сигнала дается в ГОСТе, посвященном передаче данных: Существует путаница между понятиями дискретного и цифрового сигналов. Часто цифровой сигнал называют дискретным, потому что он состоит из дискретных (отдельных) частей (samples), несмотря на то, что цифровой сигнал не является прерывистым сигналом. В английском языке используют понятия: discrete time (дискретное время), для рассмотрения значений переменных в отдельные моменты времени; continuous time (непрерывное время), для рассмотрения значений переменных в любой момент времени, причем между любыми двумя моментами времени существует бесконечное количество других моментов времени. Цифровой сигнал получается последовательностью двух шагов: Сэмплирования, который производит непрерывный сигнал дискретного времени Квантования, который заменяет значение каждого сэмпла приближенным значением, выбранным из заданного дискретного набора (квантованных уровней). Дискретность применяется в вычислительной технике для пакетной передачи данных. Аналоговый сигнал — сигнал данных, у которого каждый из представленных параметров описывается функцией времени и непрерывным множеством возможных значений. Свойства аналоговых сигналов в значительной степени противоположны свойствам квантованных: Аналоговый сигнал нельзя дискретизировать без потери части его данных (из-за своей непрерывности). Например, этот процесс физически ограничен возможностями измерительного устройства. Внесённые помехи малоустранимы. Несмотря на это, можно воспользоваться фильтром частот, если известна дополнительная информация о свойствах данного сигнала, в частности, о его полосе пропускания. 5) Двоичный код, двоичный арифметический код, преимущества двоичных систем. Двои́чный код — это способ представления данных в виде кода, в котором каждый разряд принимает одно из двух возможных значений, обычно обозначаемых цифрами 0 и 1. Разряд в этом случае называется двоичным разрядом. В случае обозначения цифрами «0» и «1», возможные состояния двоичного разряда наделяются качественным соотношением «1» > «0» и количественными значениями чисел «0» и «1». Двоичный код может быть непозиционным и позиционным. Позиционный двоичный код лежит в основе двоичной системы счисления, широко распространенной в современной цифровой технике. Выполнение арифметических действий в любых позиционных системах счисления производится по тем же правилам, которые используются в десятичной системе счисления. Так же, как и в десятичной системе счисления, для выполнения арифметических действий необходимо знать таблицы сложения (вычитания) и умножения. Таблица сложения, вычитания и умножения для двоичной системы счисления  |