Реферат - Электромашинные усилители. Электромашинные усилители
 Скачать 488.5 Kb. Скачать 488.5 Kb.
|

|
ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ 1.1. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ Усилителем называют такое устройство, в котором посредством сигнала малой мощности (входная величина) управляют сравнительно большой мощностью (выходная величина). При этом выходная величина является функцией входного сигнала и усиление происходит за счет энергии внешнего источника. По виду управляемой энергии усилители можно разделить на электрические, пневматические, гидравлические, механические. Электрические усилители в свою очередь подразделяются на электронные, тиратронные, транзисторные, магнитные, сег-нетоэлектрические и электромашинные. Первые пять являются статическими, а электромашинные — вращающимися усилителями. В электромашинных усилителях выходная (управляемая) электрическая мощность создается за счет механической мощности приводного двигателя. Электромашинные усилители (ЭМУ) представляют собой коллекторную машину постоянного тока. В зависимости от способа возбуждения электромашинные усилители подразделяются на усилители продольного поля и усилители поперечного поля. К усилителям продольного поля, в которых основной поток возбуждения направлен по продольной оси машины, относятся:
5)двух- и трехступенчатые ЭМУ продольного поля К усилителям поперечного поля, в которых основной поток возбуждения направлен по поперечной оси машины, относятся: 1 )ЭМУ с диаметральным шагом обмотки якоря, 2) ЭМУ с полудиаметральным шагом обмотки якоря, 3) ЭМУ с разделенной магнитной системой. Чем меньше мощность управления электромашинного усилителя, тем меньше вес и габариты аппаратуры управления. Поэтому основной характеристикой является коэффициент усиления. Различают коэффициенты усиления по мощности, току и напряжению. Коэффициент усиления ЭМУ по мощности kpесть отношение мощности на выходе РВых к мощности на входе Рвхпри установившемся режиме работы: Коэффициент усиления по напряжению где UВЫХ — напряжение выходной цепи; — напряжение входной цепи. Из сказанного следует, что Коэффициент усиления п о току kt— это отношение тока выходной цепи /вых усилителя к току входной цепи /вх: Электромашинные усилители могут иметь достаточно высокий коэффициент усиления по мощности (103-М05). Не менее важным для усилителя является его быстродействие, характеризуемое постоянными времени его цепей. Постоянная времени определяется величиной энергии магнитного поля, изменяющегося в процессе регулирования. Для электрической цепи постоянная времени где L— индуктивность цепи; ΣR — активное сопротивление цепи. В электромашинных усилителях постоянная времени T= 0,02÷0,2 сек. От ЭМУ стремятся получить большой коэффициент усиления по мощности и большое быстродействие, т. е. по возможности меньшие постоянные времени. Так как постоянная времени ЭМУ пропорциональна коэффициенту усиления по мощности ЭМУ, то для удобства сравнения различных усилителей вводят коэффициент добротности &д, представляющий собой отношение коэффициента по мощносте к сумме постоянных времени ступеней усиления: B системах автоматического регулирования ЭМУ применяются в качестве усилителей мощности и работают в основном при переходных режимах, в процессе которых возникаютзначительные перегрузки по току. Поэтому одним из требований к ЭМУ является хорошая перегрузочная способность. К числу важнейших требований, предъявляемых к ЭМУ, относятся надежность в работе и стабильность характеристик. ЭМУ, используемые на самолетах и транспортных установках, должны обладать минимальными габаритами и весом. В радиоэлектронной промышленности наибольшее распространение получили независимый ЭМУ, ЭМУ с самовозбуждением и ЭМУ поперечного поля с диаметральным шагом. Далее рассмотрены эти типы усилителей. 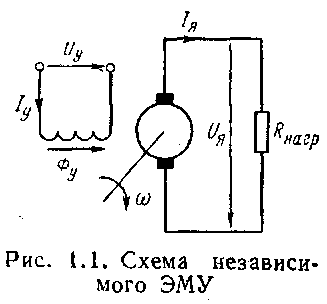 1.2. НЕЗАВИСИМЫЙ ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ Как уже отмечалось, независимый электромашинный усилитель относится к усилителям продольного поля. Простейшим типом такого усилителя является обычный генератор постоянного тока с независимым возбуждением (рис. 1.1). Коэффициент усиления по мощности независимого ЭМУ где (Uя— напряжение на зажимах якоря; /я— ток якоря; Iy—ток управления (возбуждения); Ry—сопротивление обмотки управления (возбуждения). Для выяснения зависимости коэффициента усиления по мощности кр от основных параметров машины и нагрузки преобразуем равенство (1.1). Учитывая, что ток якоря где Rя — сопротивление обмотки якоря; Rнагр— сопротивление нагрузки, и напряжение на зажимах якоря Uя≈Ея, равенство (1.1) можно записать в виде  Выражая э. д. с. якоря Eя через скорость и магнитный поток, индуктивность обмотки управления Ly через потокосцепление обмотки и ток в ней, а также учитывая, что магнитный поток пропорционален м. д.с. обмотки- управления и магнитной проводимости машины Λ, после преобразований получим 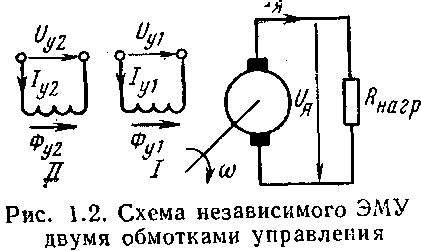 ω — угловая скорость вращения якоря. Из Из уравнения (1.3) видно, что коэффициент усиления по мощ- ности независимого ЭМУ при постоянном быстродействии (Ту= const) пропорционален квадрату скорости вращения якоря, маг- нитной проводимости машины и зависит от соотношения сопротивлений обмоток машины и нагрузки. Таким образом, чтобы иметь высокий коэффициент усиления по мощности, необходимо использовать высокооборотный генератор постоянного токa с ненасыщенной магнитной cистемой (высокое значение Λ). Обычный генератор постоянного тока с независимым возбуждением не обладает этими свойствами, поэтому его коэффициент усиления по мощности невелик: kp=20÷100. В системах автоматического управления, где на вход усилителя подается несколько сигналов, одной обмотки управления (возбуждения) недостаточно, поэтому в усилителях обычно применяют 2, 3, 4 обмотки управления. На рис. 1.2 представлена принципиальная схема независимого ЭМУ с двумя обмотками управления. Так как обмотки управления расположены в одних и тех же пазах статора, то между обмотками существует полная магнитная связь. Поэтому при нескольких обмотках управления, имеющих замкнутые контуры, постоянная времени для какой-либо обмотки управления равна сумме постоянных времени обмоток. Для усилителя, показанного на рис. 1.2, где Tу1 и Ту2—соответственно постоянные времени однойобмотки при разомкнутой другой. При холостом ходе усилителя и подключении одной обмотки управления имеем одну постоянную времени цепи управления где Ly1— индуктивность обмотки управления; Ryl— активное сопротивление обмотки управления. Переходный процесс нарастания напряжения при холостом ходе усилителя описывается уравнениями  где Uy1— напряжение, приложенное к обмотке управления, iγ1 — ток в обмотке управления, Ея— действующее значение э. д. с. на выходе ЭМУ в установившемся режиме, ku— коэффициент усиления ЭМУ по напряжению. Решение уравнения (1.6) с учетом (1.7) имеет вид где ея— мгновенное значение э. д. с. якоря. Из уравнения (1.8) видно, что нарастание э. д. с. ея при работе усилителя в режиме холостого хода идет по экспоненте с постоянной времени Tyi. Последняя составляет для усилителей различных мощностей от нескольких сотых до нескольких десятых секунды. Электромашинный усилитель, работающий в режиме холостого хода, с точки зрения динамики можно представить в виде апериодического звена с постоянной времени Tyi. Передаточная функция для этого режима Передаточную функцию усилителя с активной нагрузкой определяют с учетом уравнения напряжений в цепи якоря и нагрузки [4]. Уравнение передаточной функции усилителя с активной нагрузкой имеет вид  -постоянная времени цепи якоря, iнагр — ток нагрузки; Lя — индуктивность обмотки якоря. Уравнение(1.10) записано без учета внутренней обратной связи в усилителе Внутренняяобратная связь имеется в усилителе в виде размагничивающегодействия реакции якоря. Эта обратная связь нелинейна вследствие нелинейности характеристики намагничивания и ТОЛЬКО приближенно при небольших токах нагрузки ее можно считатьлинейной. Передаточная функция усилителя в общем виде с учетом размагничивающего действия реакции якоря к 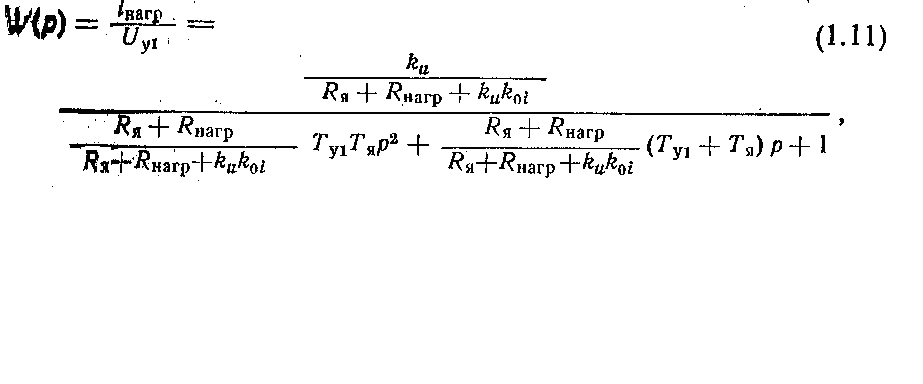 01 — коэффициент внутренней обратной связи по току. 01 — коэффициент внутренней обратной связи по току. Из уравнения (1.11) видно, что внутренняя обратная связь по току уменьшает общий коэффициент усиления (числитель выражения 1.11). Одновременно увеличивается быстродействие ЭМУ, что находит выражение в уменьшении коэффициентов при постоянных времени (знаменатель уравнения 1.11). В целом коэффициент добротности ЭМУ увеличивается. В независимом ЭМУ не удается получить большой коэффициент усиления по мощности, поэтому такие усилители нашли незначительноеприменение в системах автоматического регулирования. Однако в системах генератор—двигатель, где от двигателя требуется изменение скорости вращения в широком диапазоне, генератор работает в режиме независимого ЭМУ. Простейшим из электромашинных усилителей является одноступенчатый независимый ЭМУ. Для увеличения коэффициента усиления часто используют более сложные многоступенчатые ЭМУ, а так как каждая ступень усиления многоступенчатого усилителя может рассматриваться как элементарный одноступенчатый усилитель, то приведенные результаты анализа работы одноступенчатого ЭМУ применимы и к многоступенчатым. 1.3. ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ С САМОВОЗБУЖДЕНИЕМ Коэффициент усиления по мощности независимого ЭМУ не превышает 100. С целью повышения коэффициента усиления по мощности ЭМУ были созданы электромашинные усилители с самовозбуждением. В 1942 г. фирма Вестингауз начала серийный выпуск этих усилителей под названием рототрол. К 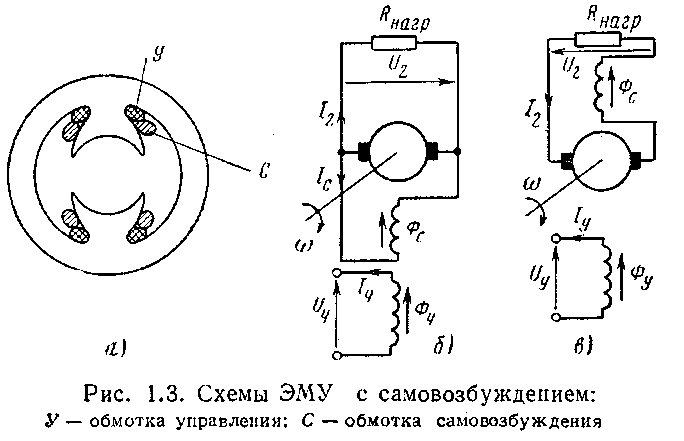 онструктивно ЭМУ с самовозбуждением (ЭМУС) отличается от независимого ЭМУ только тем, что на его полюсах возбуждениясоосно с обмотками управления размещается обмотка самовозбуждения, включаемая параллельно обмотке якоря или последовательно с ней. онструктивно ЭМУ с самовозбуждением (ЭМУС) отличается от независимого ЭМУ только тем, что на его полюсах возбуждениясоосно с обмотками управления размещается обмотка самовозбуждения, включаемая параллельно обмотке якоря или последовательно с ней.На рис. 1.3, а показано конструктивное расположение обмоток управления и самовозбуждения на полюсах статора ЭМУС; на рис. 1.3, б представлена принципиальная схема ЭМУС с параллельным возбуждением, на рис. 1.3, в — с последовательным возбуждением. Для пояснения принципа действия ЭМУС рассмотрим возбуждение генератора постоянного тока с параллельным возбуждением. На рис. 1.4, а изображены характеристика холостого хода машины E — f(IBωB), т. е. зависимость э. д. с. от м. д. с. возбуждения и вольтамперные характеристики цепи возбуждения 1и2, определяющие падения напряжений в ней. Обозначим через α1— угол наклона линейного участка характеристики холостого хода, через α2 и α3— угол наклона вольтамперной характеристики цепи возбуждения. У гол наклона вольтамперной характеристики цепи возбуждения α2или α3 зависит от величины сопротивления цепи возбуждения, так как где α— угол наклона вольтамперной характеристики цепи возбуждения; U— напряжение, приложенное к цепи возбуждения; / — ток в цепи возбуждения. Из приведенных на рис. 1.4, а характеристик видно, что в случае α2< α1 возбуждения машины не произойдет, так как согласно характеристикам при одной и той же величине м. д. с, например F1, генератор выработает э. д. с. Ε1, а для создания такой же м. д. с. на обмотке возбуждения необходимо напряжение U1. Гак как U1>E1то возбуждение машины невозможно. В случае α≤αкр машина возбудится до точки С. Угол наклона начального участка характеристики холостого хода называют критическим углом оскр. Таким образом, условия самовозбуждения можно записать через углы: α≤αкр (1.13) В 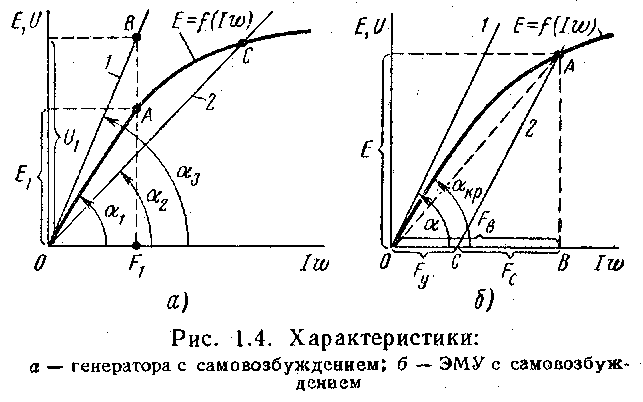 электромашинном усилителе обмотку самовозбуждения подбирают так, чтобы при отсутствии сигнала на обмотке управления усилитель не возбуждался, т. е. выбирают α>ακρ (прямая 1 на рис. 1.4, б). Если на обмотку управления подать сигнал, создающий м. д. с. Iyωy=Fy, то вольтамперная характеристика переместится параллельно прямой 1 и займет положение прямой 2. Усилитель возбудится до точки А и на клеммах якоря появится э. д. с. Е. Нетрудно заметить, что э. д. с. Е создается м. д. с. возбуждения  где Fc— м. д. с. обмотки самовозбуждения. где Fc— м. д. с. обмотки самовозбуждения.Заменим отрезок характеристики OAрис. 1.4, б прямой линией и рассмотрим треугольники OABи CAB. Из треугольника OAB Из треугольника CAB E = Fctgα. (1.16) Решая совместно (1.14) — (1.16), находим значение коэффициента усиления по мощности, выраженного через магнитодвижущие силы: И  з равенства (1.17) видно, что, чем ближе угол наклона вольтамперной характеристики обмотки самовозбуждения к αкр, тем больше коэффициент усиления по мощности усилителя. В критическом случае, когда α=ακρ, коэффициент усиления kp=∞. В случае α<ακρ ЭМУС становится практически неуправляемым, т. е. переходит в релейный режим, из-за произвольного самовозбуждения при отсутствии сигнала на обмотке управления. Вследствие того что магнитопровод усилителя имеет остаточное поле, выбирать α достаточно близким к окр нельзя, так как может произойти самовозбуждение. Поэтому в реальных усилителях выбирают угол наклона вольтамперной характеристики на 3—5% больше критического угла наклона характеристики E=f(F). При таких параметрах коэффициент усиления ЭМУС по мощности kpдостигает величины порядка 400—500. Для определения динамических свойств электромашинного усилителя с самовозбуждением рассмотрим процесс самовозбуждения машины. Допустим, что характеристика намагничивания линейна (прямая линия OAрис. 1.4, б), скорость вращения генератора постоянна, вихревые токи малы. Пусть на обмотку управления подано напряжение Uy(см. рис. 1.3, б). Тогда для холостого хода ЭМУС можно написать следующие уравнения равновесия э. д. с. Для обмотки управления где iy — ток в обмотке управления; iс — ток в обмотке самовозбуждения; Ry— сопротивление обмотки управления; Ly—индуктивность обмотки управления; M— взаимоиндуктивность между обмотками управления и самовозбуждения. Для цепи самовозбуждения где ея— э. д. с. якоря; Rc— сопротивление обмотки самовозбуждения; L0— индуктивность обмотки самовозбуждения. Для э. д. с. ЭМУ (1-20) г витков обмотки самовозбуждения; ωу, ωc— числа витков обмоток управления и самовозбуждения; k= ωy/ωc— коэффициент трансформации между обмотками; RK = —f - = tg αKp — критическое сопротивление контура возбуждения, определяемое из треугольника AOBрис. 1.4,6 (IB=Iy+Iс— полный ток возбуждения, соответствующий м. д. с. возбуждения FB). Будем считать, что между обеими обмотками возбуждения существует полное магнитное сцепление, т. е. (1.21) тогда можно записать Запишем уравнения равновесия э. д. с. (1.18) и (1.19) в операторной форме. В результате преобразования уравнения э. д. с. можно записать в виде ( 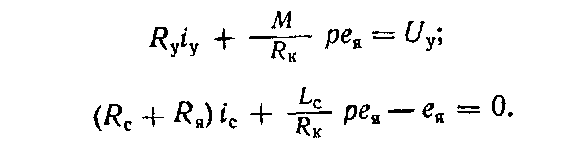 1.23) 1.23)(1.24) Умножим равенство (1.23) на kTp (Rc+Ra), а (1.24) — на Ry, с учетом (1.20) получим уравнение напряжения генератора  (1.25) Здесь — коэффициент, учитывающий, насколько близко сопротивление цепи самовозбуждения к критическому - постоянная времени цепи самовозбуждения; — постоянная времени обмотки управления. Используя (1.22), имеем ( Если учесть, что в начальный момент времени (t=0) э. д. с. якоря также равна нулю, решение уравнения (1.26) примет вид (1.27) Из уравнения (1.27) видно, что если к обмотке управления ЭМУС приложить напряжение управления Uy, то процесс нарастания э. д. с. усилителя идет по экспоненциальному закону (рис. 1.5) с эквивалентной постоянной времени Установившееся значение э. д. с. усилителя будет Из выражения (1.29) можно найти коэффициент усиления по напряжению усилителя Выражения (1.28) и (1.30) показывают, что коэффициент усиления по напряжению kaи его э Так как в усилителях ε> 1 на 3—5%, то эквивалентная постоянная времени Tзначительно превышает сумму постоянных времени обмоток самовозбуждения и управления. Например, если 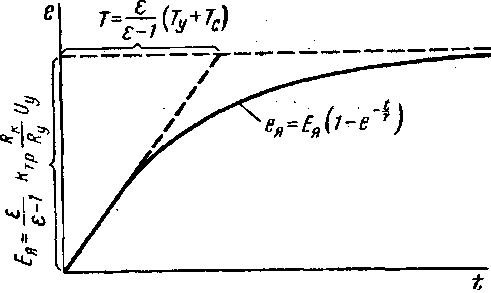 ε =1,03, то эквивалентная постоянная времени в 3—4 раза превышает сумму постоянных времени обмоток самовозбуждения и управления. Поэтому электромашинные усилители с самовозбуждением используются в тех случаях, когда не требуется большое быстродействие. Уравнение (1.26) с учетом (1.28)—(1.30) можно записать в виде Отсюда видно, что ЭМУС представляет собой апериодическое Вйеио с передаточной функцией Τаκие усилители применяются главным образом для питания обмотки возбуждения генератора в системе генератор—двигатель и в этом случае длительность переходного процесса определяется постоянной времени генератора. 1.4. ЭЛЕКТРОМАШИННЫЙ УСИЛИТЕЛЬ ПОПЕРЕЧНОГО ПОЛЯ В отличие от независимого ЭМУ и ЭМУ с самовозбуждением (ЭМУС), в которых основным потоком возбуждения является продольный магнитный поток, направленный вдольполюсов возбуждения, в ЭМУ поперечного поля основным потоком возбуждения является поперечный поток реакции якоря. На рис. 1.6, апредставлена схема ЭМУ поперечного поля.Конструктивно он выполнен подобно генератору постоянного тока, но имеет дополнительный комплект щеток, установленных на по перечной оси машины и замкнутых накоротко. На статоре ЭМУ расположен ряд обмоток. В продольной оси полюсов dd расположены обмотки управления У, которых обычно бывает несколько (чаще две или четыре). Соосно с ними расположена компенсационная обмотка К, включаемая в продольную цепь последовательно с обмоткой якоря. Компенсационная обмотка К шунтирована регулирующим сопротивлением Rш для регулирования степени компенсации усилителя. 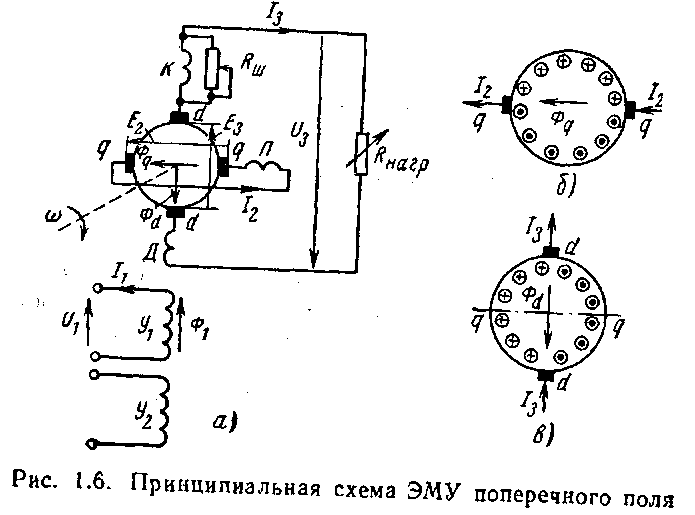 В этой же цепи для улучшения коммутации включена обмотка дополнительных полюсов Д. Поперечная цепь машины qq замкнута накоротко. Иногда для улучшения коммутации в поперечной цепи последовательно с якорем включают поперечную обмотку, подмагничивания П. Рассмотрим принцип действия ЭМУ поперечного поля. Пусть скорость приводного двигателя равна номинальной ω=ωΗ= const и к одной из обмоток управления приложено напряжение постоянного тока U1. Тогда под действием небольшого по величине магнитного потока возбуждения Ф1(небольшого потому, что при высоком коэффициенте усиления на вход усилителя подается относительно малая мощность) в поперечной цепи якоря qq возникает э. д. с. E2, также относительно малая по величине. Так как цепь поперечных щеток qq замкнута накоротко проводником, имеющим малое сопротивление, то в поперечной цепи якоря возникает ток I2. Величина этого тока уже значительна, так как цепь имеет малое сопротивление. На рис. 1.6, б показано направление тока I2 по проводникам якоря, создающего поперечный поток реакции якоря Фq. Под действием этого потока в продольной цепи якоря dd возникает э.д.с. Е3, которая снимается продольными щетками. Э. д. с. Е3 вызывает появление тока I3 и в нагрузке Rнагр происходит падение напряжения U3. На рис. 1.6, в показано направление тока I3 в цепи якоря. Под действием тока I3 в якоре возникает продольный поток реакции якоря Фd, который направлен навстречу потоку управления Ф1. Если не принять никаких мер, то большой по величине поток Фd размагнитит усилитель и никакого усиления не произойдет. Для компенсации (уравновешивания) продольного потока реакции якоря на статоре расположена специальная компенсационная обмотка К. Продольный поток реакции якоря Фа пропорционален магнитодвижущей силе Fd = I3ωя, (1.33) где I3—ток в продольной цепи якоря; ωя—число витков в параллельной ветви обмотки якоря. Из (1.33) видно, что продольная м. д. с. Fd, и, следовательно, пропорциональный ей магнитный поток Фа изменяются с изменением тока I3, т. е. зависят от величины сопротивления нагрузки Rнагр. Хорошее компенсирующее действие обмотки К получают и том случае, если м. д. с. этой обмотки FH также зависит от величины тока I3 в продольной цепи машины. Поэтому обмотку К включают в продольную цепь машины последовательно с якорем. Тогда м. д. с. компенсационной обмотки Fк = I3ωк, (1.34) где ωк — число витков компенсационной обмотки. Степень компенсации усилителя характеризуется коэффициентом компенсации к= Fk/Fd (1.35) Различают три возможных случая работы усилителя: когда k=l, Fk=Fd — машина скомпенсирована, т. е. м. д.с. продольной реакции якоря равна м. д. с. компенсационной обмотки; когда k<1, Fk когда k>1, Fk>Fd— машина перекомпенсирована, т. е. М. д. с. продольной реакции якоря меньше м. д. с. компенсационной обмотки. Обычно ЭМУ выпускают с небольшой перекомпенсацией: м. д. с. компенсационной обмотки примерно на 5% больше м, д. с. продольной реакции якоря, т. е. к=1,05. Для регулирования степени компенсации, как уже отмечалось, используют шунтирующее сопротивление Rш. С учетом Rш м. д. с. компенсационной обмотки Д 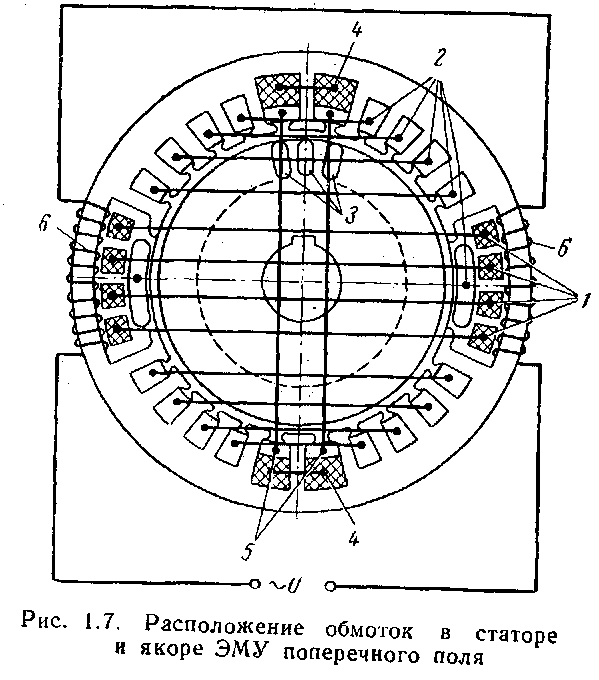 ля улучшения коммутации в продольной цепи располагают специальную сосредоточенную обмотку на дополнительных полюсах статора. Поскольку такую же обмотку нельзя разместить на поперечной оси, то для улучшения коммутации снижают величину тока I2, а чтобы при этом м. д. с. поперечной оси Fq , а следовательно, и магнитный поток Фq не были снижены, применяют специальную поперечную обмотку подмагничивания Π (рис. 1.6, а). Эта обмотка создает м. д. с. и поток Фп, направленный согласно с потоком поперечной реакции якоря Фq. ля улучшения коммутации в продольной цепи располагают специальную сосредоточенную обмотку на дополнительных полюсах статора. Поскольку такую же обмотку нельзя разместить на поперечной оси, то для улучшения коммутации снижают величину тока I2, а чтобы при этом м. д. с. поперечной оси Fq , а следовательно, и магнитный поток Фq не были снижены, применяют специальную поперечную обмотку подмагничивания Π (рис. 1.6, а). Эта обмотка создает м. д. с. и поток Фп, направленный согласно с потоком поперечной реакции якоря Фq.Таким образом, при включении поперечной обмотки подмагничивания Π магнитный поток поперечной оси Φ`q = Фq+Фп. Все рассмотренные обмотки находятся в пазах статора. На рис. 1.7 показаны листы статора и якоря и схема расположения обмоток двухполюсного ЭМУ поперечного поля. Обмотки управления 1 находятся в больших пазах, расположенных по поперечной осимашины. Эти обмотки выполнены сосредоточенными в виде четырех катушек. |