Вступительный экзамен управление в технических системах ответы. Ответы. Классификация ииус, основные определения и область применения
 Скачать 308.92 Kb. Скачать 308.92 Kb.
|

|
РАЗДЕЛ 3 1. Классификация ИИУС, основные определения и область применения. Измерительные информационные системы(ИИС) – это совокупность функционально объединенных измерительных, вычислительных и других вспомогательных технических средств для получения измерительной информации, ее преобразования, обработки с целью представления потребителю в требуемом виде, либо автоматического осуществления логических функций измерения, контроля, диагностики, идентификации и т. п. В зависимости от выполняемых функций ИИС реализуются в виде: измерительных систем (ИС); систем автоматического контроля (САК); систем технической диагностики (СТД); систем распознавания образов (идентификации) (СРО); телеизмерительных систем (ТИС). В СТД, САК, СРО измерительная система входит как подсистема. ИИС обычно классифицируют: 1. По разновидности входных величин: Поведение во времени: неизменное, изменяющееся; Расположение в пространстве: сосредоточенное, распределенное; Характер величин: непрерывный, дискретный; 2. По выходной информации –измерительные (на выходе количественная измерительная информация), контрольно-диагностические и распознающие (на выходе количественные суждения о состоянии объектов). 3. По принципам построения: Наличие/отсутствие специального канала связи; Порядок выполнения операций получения информации; Сигналы, используемые в ИИС: аналоговые, кодоимпульсные. 4. В зависимости от способа организации передачи информации между функциональными блоками (ФБ) различают цепочечную, радиальную и магистральную структуры ИИС ИИС, предназначенные для измерения и хранения информации, носят название измерительных систем (ИС).   3. Обобщенная структурная схема ИИУС ИИС содержит следующие устройства: Пассивные датчики получения первичной информации не потребляют энергию от вспомогательного источника энергии (см. рисунок 2.2,а). Активными являются датчики, которым требуются сторонний источник энергии (см. рисунок 2.2,б). Мощность, которую отдаёт объект измерения (ОИ), практически равна нулю. - устройства измерения, включающие в себя первичные и вторичные измерительные преобразователи и собственно измерительное устройство, выполняющее операции сравнения с мерой, квантование, кодирование, а в отдельных случаях и коммутатор; - устройство обработки измерительной информации, выполняющее обработку измерительной информации по определённому алгоритму (сокращение избыточности, математические операции, модуляция и т.п.); - устройство хранения информации; - устройство представления информации в виде регистраторов и индикаторов; - устройство управления, служащее для организации взаимодействия всех узлов ИИС; - устройство воздействия на объект, включающее в себя генераторы стимулирующих воздействий.  6. Основные разновидности структур ИИУС и их связь с областями возможного применения, функциональными возможностями и другими техническими характеристиками Структура ИИС зависит также от принятого в системе способа управления – централизованного или децентрализованного (см. рисунок 2.5, 2.6).  Если множеству всех алгоритмических подсистем соответствует одна техническая подсистема, то имеем централизованную структуру (см. рисунок 2.5). В ней все алгоритмы управления реализуются на одних и тех же технических средствах. Централизованные структуры имеют преимущества: высокая эффективность использования технических средств; возможность объединения всех функциональных задач на одном и том же техническом комплексе; меньшие аппаратурные затраты для обеспечения требуемой надёжности.  Децентрализованная структура со связанными подсистемами показана на рисунке 2.6. Это – структура, подобная первой, но с наличием связей между техническими подсистемами. По этим связям передаётся осведомительная информация и с их помощью можно более эффективно использовать оборудование. Подсистемы здесь равноправны, т.е. ни одна из них не может управлять другой. В таких структурах один уровень иерархии управления. В таких системах усложняются процессы отладки и модернизации, однако появляется возможность более эффективно использовать ресурсы технических средств. В то же время, как и в предыдущей структуре, управление отдельными задачами в процессе функционирования системы (с целью повышения эффективности управления в целом) здесь невозможно. Функциональные блоки могут соединяться цепочечно, радиально или магистрально. 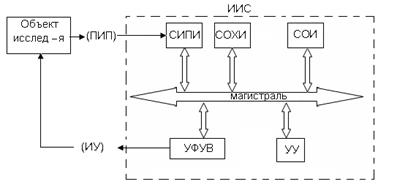 Информация от объекта исследования поступает на определённое множество первичных ИП (ПИП), преобразуется в электрическую форму и передаётся на средства измерения и преобразования информации СИПИ, в которых выходные сигналы ПИП наиболее часто подвергаются следующим операциям: фильтрации, масштабированию, аналого-цифровому преобразованию. Затем сигналы в цифровой форме (см. рисунок 2.10) передаются на цифровые средства обработки и хранения информации СОХИ для обработки по определённым программам или накапливания, а также на средства отображения информации СОИ для индикации или регистрации. Устройство формирования управляющих воздействий УФУВ посредством заданного множества исполнительных устройств ИУ воздействует на объект исследования для регулирования, тестирования и т.д. 5. Основные функциональные узлы ИИУС Функциональными блоками являются: - первичные преобразователи (ПП), размещённые постоянно в определённых точках пространства или сканирующие (перемещающиеся в пространстве); - множество аналоговых преобразователей: нормирующие преобразователи аналоговых сигналов (масштабные преобразователи, преобразователи различного вида модуляции сигнала), унифицирующие преобразователи (приведение сигналов к диапазону стандартных значений или к согласованному уровню), коммутаторы аналоговых сигналов, аналоговые вычислительные устройства, устройства памяти, сравнения, аналоговые измерительные приборы (показывающие и регистрирующие); - множество аналого-цифровых преобразователей (АЦП); - цифровые устройства – формирователи кодоимпульсных сигналов, коммутаторы, универсальные цифровые вычислительные устройства (микропроцессоры, микро-ЭВМ), накопители информации, устройства вывода, отображения и регистрации информации, цифровые индикаторы и панели; - цифроаналоговые преобразователи (ЦАП). 4. Принципы построения ИИУС, их типовые структурные схемы и элементы Составные части измерительных систем ближнего действия: первичные измерительные преобразователи – датчики (Д); элементы сравнения (СС); меры (М); элементы выдачи результата (ВР); В зависимости от вида и числа различных элементов измерительные системы делятся на: многоканальные ИС (с параллельной структурой); сканирующие ИС (с последовательной структурой); мультиплицированные ИС (с общей мерой); многоточечные ИС (с параллельно-последовательной структурой). Многоканальные ИС:  Особенности: в каждом канале – полный набор элементов. Достоинства: высокая надёжность, быстродействие. Одновременность получения результатов. Недостаток: сложность и высокая стоимость. Сканирующие ИС:  Особенности: один канал измерений, которые выполняются последовательно во времени. Содержат сканирующее устройство (СкУ), которое перемещает датчик в пространстве. Ограниченность применения: только когда измеряемая величина распределена в пространстве (температурные поля, давление, механическое напряжение и др.). Недостаток: малое быстродействие из-за последовательного измерения. Мультиплицированные ИС:  Особенности: общий для всех каналов элемент меры (М), что упрощает ИС. Недостаток: много элементов сравнения СС, равное числу измеряемых величин, что усложняет ИС. Многоточечные ИИС:  Количество датчиков “n” – до нескольких тысяч. Принцип действия – параллельно-последовательный: многократное последовательное использование одних и тех же узлов измерительного тракта. (отсюда минимальная сложность). Здесь введён измерительный коммутатор аналоговых сигналов датчиков (ИК) (чаще используется электронные ИК, состоящие из ключей и устройства управления). Достоинства многоточечных ИИС: 1. уменьшение элементов по сравнению с многоканальными ИС; 2. возможность наращивания каналов за счёт ИК. Недостатки: 1. понижение быстродействия с увеличением числа опрашиваемых датчиков; снижение точности из-за падения напряжения на ключах ИК, конечных значениях сопротивления замкнутого и разомкнутого ключей. 7. Методы оптимизации и многокритериального проектирования и их применение в ИИУС При разработке различных объектов и процессов в большинстве случаев требуется ввести более одной целевой функции. В этом случае, намного эффективней использовать концепцию формирования целевой функции на основе частных критериев. Частный критерий является мерой оптимальности определенного проектного параметра. В этом случае задача оптимизации сводится к задаче многокритериальной или векторной оптимизации, когда поиск оптимального решения производят по нескольким частным критериям. Суть многокритериальной оптимизации заключается в поиске наилучшего значения для некоторого множества характеристик проектируемого объекта. Зачастую это становится возможным только тогда, когда решение задачи представляет собой компромисс между теми частными критериями, по которым требуется оптимизировать решение. Постановку задачи многокритериальной оптимизации можно представить следующим образом:  Метод свертывания частных критериев является одним из наиболее распространенных среди методов решения задач многокритериальной оптимизации. При использовании данного метода учитывается относительная важность частных критериев оптимальности. Суть свертывания состоит в формировании скалярной функция F, которая является обобщенным критерием, основанном на векторе частных критериев оптимальности  . Решение задачи оптимизации после свертывания выглядит следующим образом: . Решение задачи оптимизации после свертывания выглядит следующим образом: где  = {w1,…,wS} – весовые коэффициенты относительной важности частных критериев оптимальности. = {w1,…,wS} – весовые коэффициенты относительной важности частных критериев оптимальности.Свертывание критериев может выполняться на основе различных математических операций. Наибольшее распространение получили следующие критерии оптимальности: аддитивный  мультипликативный  среднестепенной обобщенный  Составляется матрица бинарных предпочтений ЛПР, которое содержит результаты попарных сравнений критериев по важности. 1 — если критерий строки считается более важным, чем критерий столбца. 0 — в противном случае. 0,5 — если критерии не сравнимы по важности. Суммирование оценок по строке определяет цену критерия. Современное представление о процессе проектирования сложных технических систем включает 3 характерных цикла: внешнее проектирование формирование облика системы внутреннее проектирование Первый цикл представляет конкретизацию целей и функций системы, а также представление требований к ее характерам качества. Второй цикл служит для корректной увязки требований внешнего проектирования с конструкторскими и технологическими возможностями внутреннего проектирования и состоит в выборе рациональной структуры из некоторого множества конкурирующих структур. Третий цикл предполагает разработку выбранной структуры и ее реализацию в виде комплекса технических ф-в, принадлежащих системе требуемое качество.  Циклам проектирования соответствуют следующие уровни оптимизации систем: Глобальная оптимизация, т.е. поиск прогрессивной технической идеи для создаваемой системы. Структурная оптимизация, т.е. выбор рациональной структуры системы в рамках используемой технической идеи. Параметрическая оптимизация, т.е. подбор наилучшей совместимости параметров для выбранной структуры систем. Оптимизация системы последовательно на всех 3-х уровнях приводит к синтезу структуры, удовлетворяющей заданным требованиям по качеству. Наибольший эффект в обеспечении качества системы дает глобальная оптимизация (Глушков, Мясников, Половинкин) 30-50%, наименьший эффект — параметрическая оптимизация 10-15%, структурная оптимизация занимает промежуточное положение 20-30%. Причем, степень оптимизации зависит весьма существенно от множества конкурирующих структур и их проработки по векторному критерию качества. Анализ конкурирующих структур неизбежно связан с использованием многих критериев и выполняется в условиях неопределенности, т.е. в условиях неполноты информации в отношении создаваемой системы и внешней среды, взаимодействующей с ней. По этой причине проблема структурной оптимизации формируется как проблема многокритериального выбора рациональной структуры из некоторого множества конкурирующих структур в условиях неопределенности. Проблема структур оптимизации в такой постановке решается на основе методологии системного анализа. В процессе структурной оптимизации необходимо осуществлять целенаправленный поиск альтернативных структур, т.к. их случайный перебор обычно не приводит к успеху. При этом, чем больше альтернативных структур, тем с большей вероятностью можно гарантировать конечный результат, т.е. выбор наиболее рациональной структуры. Вместе с тем, большой объем альтернативных структур порождает проблему отсева (отбраковки) неперспективных структур, исходя из тех или иных ограничений и требований к системе. Таким образом процесс структурной оптимизации — это процесс систематизации альтернативных структур с отсевом неперспективных структур и определение множества конкурирующих структур, из числа которых выбирается рациональная структура.  8. Классификация первичных измерительных преобразователей, их свойства, параметры и характеристики и роль при проектировании ИИУС Измерительный преобразователь – техническое средство, служащее для преобразования измеряемой величины в другую величину или сигнал измерительной информации, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи и имеющее нормированные метрологические характеристики В зависимости от вида выходного сигнала различают генераторные и параметрические измерительные преобразователи. К генераторным относятся преобразователи, выходные сигналы которых обладают энергетическими свойствами (эдс, электрический ток, механическая сила, давление). Параметрическими называются преобразователи, в которых изменение входного сигнала приводит к изменению их определенных параметров – активного сопротивления, емкости, индуктивности, упругости и др. Для получения энергетического сигнала в этих случаях требуются дополнительные источники энергии. По месту в функциональной схеме измерения различают первичные измерительные преобразователи, на которые непосредственно воздействует преобразуемая величина, и промежуточные, стоящие в цепи преобразования после первичного. Разновидностями промежуточных измерительных преобразователей по функциональному назначению являются передающие и масштабные преобразователи. Передающий измерительный преобразователь — измерительный преобразователь, предназначенный для дистанционной передачи сигнала измерительной информации. Масштабный измерительный преобразователь — измерительный преобразователь, предназначенный для изменения размера величины или измерительного сигнала в заданное число раз. По характеру преобразования промежуточные измерительные преобразователи различают на: аналоговый, аналого-цифровой и цифро-аналоговый. Аналоговый измерительный преобразователь — измерительный преобразователь, преобразующий одну аналоговую величину (аналоговый измерительный сигнал) в другую аналоговую величину (измерительный сигнал). Аналого-цифровой измерительный преобразователь — измерительный преобразователь, предназначенный для преобразования аналогового измерительного сигнала в цифровой код. Цифро-аналоговый измерительный преобразователь — измерительный преобразователь, предназначенный для преобразования числового кода в аналоговую величину. По рабочему положению относительно объекта измерения (контроля) измерительные преобразователи делят на проходные, накладные и комбинированные. Составные элементы накладных преобразователей располагаются с одной стороны объекта измерения. Проходные преобразователи в процессе измерения либо охватывают объект снаружи (наружные проходные), либо помещаются внутри объекта (внутренние проходные), либо погружаются в жидкий объект (погружные). Комбинированные преобразователи представляют собой конструкцию из накладных и проходных преобразователей. Особую разновидность представляют собой экранные преобразователи, отличающиеся тем, что их составные элементы, создающие и воспринимающие физическое поле, разделены контролируемым объектом. По характеру зависимости выходного сигнала первичного измерительного преобразователя от преобразуемого параметра объекта измерения различают абсолютный и дифференциальный измерительные преобразователи. Выходной сигнал абсолютного измерительного преобразователя определяется абсолютным значением преобразуемого параметра объекта измерения (термин абсолютный здесь используется в значении безотносительный, безусловный). Термин дифференциальный происходит от английского different−различный, разностный. Условно можно считать, что дифференциальный измерительный преобразователь состоит из двух однотипных абсолютных преобразователей, на которые преобразуемая величина воздействует по-разному, а результирующий выходной сигнал определяется разностью выходных сигналов отдельных преобразователей. Дифференциальные измерительные преобразователи, а также дифференциальное включение отдельных абсолютных измерительных преобразователей используют для корректировки функции преобразования (в том числе с целью обеспечения нулевого значения выходного сигнала при нулевом значении преобразуемого параметра, повышения линейности функции преобразования), а также компенсации влияния на результат преобразования какого-либо мешающего фактора.  9. Защита входных измерительных цепей ИИУС от помех Для оценки эффективности защиты от помех далее используется коэффициент ослабления помех 20 log uп.вх/uп.вых, дБ. К общим мерам уменьшения влияния помех следует отнести использование вида модуляции сигналов, обеспечивающего нужную помехоустойчивость, и повышение уровня полезного сигнала. Рациональный выбор вида модуляции сигналов может быть сделан, если известен характер помех. При таком выборе должен быть использован соответствующий материал. Для повышения уровня полезного сигнала используется переход к импульсной модуляции. Предполагается, что при переходе от AM- к АИМ – сигналу удается сокращением длительности импульса повысить его амплитуду. Предел такому повышению сигнала ставят тепловые, временные ограничения, а в некоторых случаях электрическая прочность элементов измерительной цепи. При использовании импульсного питания измерительных цепей с тензорезисторами, закрепленными на поверхности металлической детали с достаточной теплоемкостью, удается повысить полезный сигнал более чем на порядок и ослабить влияние помех до 20 дБ. Нужно отметить, что длительность импульса, постоянные времени измерительной и тепловой цепей должны быть такими, чтобы за время измерения тепловой режим изменился незначительно. Один из видов борьбы с помехами – это заземление. Виды заземлений представлены на рис. 6.2.  Для уменьшения влияния продольных помех используется ряд мер. Одна из них – гальваническое разделение частей цепи, в которых имеются места заземления. Гальваническое разделение производится преимущественно с помощью трансформаторов, разделительных конденсаторов и оптронов. Ключи могут быть как контактными, так и бесконтактными. Гальваническое разделение измерительных цепей с помощью оптронов наиболее эффективный метод устранения помех.  Применяются схемы с разделительными и компенсирующими трансформаторами. Одной из мер является симметрирование входной цепи. Защита измерительных цепей от внешних наведенных (поперечных) помех достигается рядом мер, к числу которых относятся уменьшение длины проводов за счет приближения к датчикам аналого-цифровых измерительных устройств, а также сближение и скрутка проводов, идущих к датчикам. При скрутке проводов ЭДС, наводимые в отдельных элементарных контурах, вычитаются, и благодаря этому удается уменьшить влияние поперечных помех на измерительные провода на несколько порядков. Применяют также магнитное и электростатическое экранирование входных цепей от низкочастотных и высокочастотных магнитных полей. Части систем с разными потенциалами или имеющие гальванические развязки должны иметь свои экраны. Экранировка проводов может ослабить наведенные помехи 50 Гц до 30 дБ. При синусоидальной наведенной помехе возможно выполнение измерений в моменты, когда помеха принимает допустимо малый размер. При таком методе удается получить значительное ослабление помехи. Для уменьшения внутренних помех целесообразно провода питания прокладывать и экранировать отдельно от измерительных проводов с низким уровнем полезного сигнала, коммутация сигналов высокого и низкого уровней должна проводиться отдельными коммутаторами. В необходимых случаях следует использовать специальные средства защиты от перерывов питания. Должны быть продуманы места заземления измерительных цепей. Некоторые точки заземления могут появиться в процессе измерительного эксперимента, например, из-за нарушения сопротивления изоляции, что может привести к организации контуров, вызывающих дополнительные погрешности. Такие контуры образуются, если заземлять экраны в нескольких точках. При проектировании системы рекомендуется составить и проанализировать схему заземления, а при наладке — уточнить ее. Дальнейшее повышение помехоустойчивости может быть достигнуто обработкой суммы сигнала с помехой, имеющей случайный характер, в аналоговом или цифровом виде. Наиболее часто встречающиеся здесь виды обработки — это фильтрация и накопление сигналов, в течение которого происходит усреднение. 10. Классификация исполнительных устройств, их свойства, параметры, характеристики и роль при проектировании ИИУС. Исполнительные механизмы могут быть, как и другие элементы, в зависимости от рода используемой энергии электрическими, пневматическими, гидравлическими. Исполнительный механизм предназначен для обработки команд, выработанных регулятором и воздействия на конечное звено системы регулирования – регулируемый орган. Гидравлические и пневматические исполнительные механизмы характеризуются: а) простотой конструкции; б) большими выходными моментами или усилиями при малых габаритах; в) высоким к.п.д.; г) большой надежностью. По своей конструкции эти серводвигатели исполнительных механизмов можно разделить на: 1) поршневые двигатели; 2) мембранные двигатели; 3) шестеренчатые двигатели. Электрические исполнительные механизмы характеризуются: а) разнообразием типов электродвигателей; б) простотой питания в промышленных условиях; в) легкостью получения больших скоростей. В качестве серводвигателей электрических исполнительных механизмов используются: 1) двигатели постоянного тока; 2) двигатели переменного тока; 3) соленоидные или электромагнитные двигатели. Последние применяются обычно для перемещения регулирующего органа клапанного типа. Выбор того или иного типа исполнительного механизма зависит от типа применяемого регулирующего устройства. В нефтяной промышленности большое применение находят пневматические исполнительные механизмы, отличающиеся надежностью действия и полной безопасностью в пожарном отношении. Выбор исполнительного механизма обычно определяется следующими основными факторами: 1) применяемым видом вспомогательной энергии; 2) величиной и характером требуемого перестановочного усилия или мощности; 3) допустимой инерционностью; 4) желательными габаритами и весом; 5) зависимостью рабочих характеристик от внешних влияний; 6) надежностью. Исполнительное устройство должно обеспечить заданную точность и скорость отработки сигналов, поступающих на вход исполнительного устройства. Точность отработки сигналов определяет в свою очередь необходимую чувствительность устройства и, следовательно, параметры входящих в него усилителей. Обычно чувствительность исполнительных устройств должна лежать в пределах от единиц до сотен милливольт. Скорость отработки или быстродействие исполнительного устройства определяется временем перемещения регулирующего органа из одного крайнего положения в другое при подаче на вход исполнительного устройства максимального сигнала. Это время зависит от скорости вращения приводного двигателя и передаточного отношения редуктора. Выбор быстродействия исполнительного устройства осуществляется в зависимости от известных динамических характеристик регулируемого объекта. Для обеспечения требуемого качества регулирования исполнительное устройство должно отрабатывать с малыми искажениями сигнала в определенной полосе частот. Выбег выходного вала при снятии управляющего сигнала, а также люфты в исполнительном устройстве, ухудшающие качество переходного процесса, должны быть по возможности небольшими. Исполнительные устройства с нереверсивным электродвигателем по конструктивному выполнению могут быть с вращательным движением выходного вала или с поступательным перемещением выходного штока. В некоторых исполнительных устройствах (например, типов ПΡ и ДР) предусмотрено по выбору вращательное или поступательное движение. Исполнительные устройства с вращательным движением выходного вала в зависимости от конструкции приводимого ими регулирующего органа могут выполняться как однооборотные, так и многооборотные или постоянно вращающиеся. Многооборотные исполнительные механизмы предназначены в основном для перемещения запорных вентилей и задвижек. В исполнительных устройствах с бесконтактным управлением для управления двигателями могут быть использованы электронные, магнитные или полупроводниковые усилители, а также их комбинации. Бесконтактные исполнительные устройства могут быть выполнены с переменной и постоянной скоростью вращения выходного вала. В этих исполнительных устройствах целесообразно применять только реверсивные схемы управления двигателем, обеспечивающие остановку регулирующего органа в любом промежуточном положении. Бесконтактные исполнительные устройства по конструктивному выполнению могут иметь также вращательное движение выходного вала или поступательное движение выходного штока. Устройства с вращательным движением могут быть однооборотными, многооборотными или постоянно вращающимися. 11. Краткая характеристика параметров и свойств интерфейсов, применяемых при разработке и проектировании ИИУС Интерфейс ИИС – это совокупность цепей, объединяющих различные устройства и алгоритмы, определяющая порядок передачи информации между этими устройствами. Цепи интерфейса разделяют на три группы: информационные, адресные и управляющие, обеспечивающие информационную, электрическую и конструктивную совместимость. Различают программные и физические интерфейсы. Информация передается в виде кодов определенного числа или словами. Для различия байтов данных, команд и адресов используются осведомительные сигналы. Для инициирования передач, синхронизации работы устройств и завершения передачи служат управляющие сигналы. Основной характеристикой интерфейса является скорость передачи информации, которая зависит от алгоритма передачи и технических характеристик цепей связи. С целью модульного принципа построения систем разработаны стандартные интерфейсы, обеспечивающие информационную, электрическую и конструктивную совместимость различных устройств. Структуры интерфейсов бывают одно-, двух- и более ступенчатыми с возможными вариантами исполнения: цепочная, радиальная, магистральная и радиально-магистральная, каждая из которых может быть с централизованным или децентрализованным управлением (рис. 4.1) Обмен информацией может быть осуществлен синхронным и асинхронным методами. Синхронная передача и прием сигналов производится в фиксированные моменты времени, темп обмена информацией при асинхронном методе определяется сигналом квитирования. Этот метод особенно эффективен при обмене информацией с различным быстродействием функциональных блоков. Интерфейс 1*8-485 — широко распространенный высокоскоростной и помехоустойчивый последовательный промышленный интерфейс передачи измерительной информации. Практически все современные измерительные приборы и компьютеры промышленного исполнения, большинство преобразователей и исполнительных устройств, а также программируемые логические контроллеры измерительных приборов и систем наряду с традиционным интерфейсом ЛБ- 232 содержат в своем составе ту или иную реализацию интерфейса 118-485. Сигналы интерфейса 118-485 передаются дифференциальными перепадами напряжения (0,2...8 В), что обеспечивает высокую помехоустойчивость и общую длину линии связи до 1 км (больше — с использованием специальных устройств — повторителей). Кроме того, интерфейс 118-485 позволяет создавать сети за счет паралдельного подключения многих устройств к одной физической линии (так называемая «мультиплексная шина»). В обычном РС- совместимом персональном компьютере (не промышленного исполнения) или измерительном приборе этот интерфейс отсутствует, поэтому для его применения необходим адаптер-преобразователь интерфейса 118-485/232 (рис. 5.5). Традиционные системы с интерфейсами 118-232 и 118-485 на основе медного кабеля в большинстве случаев не обеспечивают требования по ширине полосы пропускания и дальности передачи. В конструкциях цифровых приборов и автоматизированных систем коммерческого учета энергоресурсов практически идеальным решением являются волоконно-оптические кабели, обеспечивающие существенно большую полосу пропускания при меньших потерях. С учетом этих требований разработан и стандартизован новый многополюсный оптический интерфейс МРО (Multi-Fiber Push On). 12. Аналоговые и аналогово-импульсные методы формирования, выделения и обработки информации в ИИУС |