ТОАТ Лаба1. Лр-1 ПИД-С min — копия. Лабораторная работа 1 Название Синтез и исследование системы автоматического регулирования с типовым регулятором
 Скачать 1.25 Mb. Скачать 1.25 Mb.
|

|
Лабораторная работа №1 Название: «Синтез и исследование системы автоматического регулирования с типовым регулятором» Цель работы: получение навыков формализации объекта регулирования и экспериментальной оценки его параметров, обучение инженерным методам настройки типовых регуляторов для обеспечения заданных показателей качества регулирования и методам оценки достигнутых показателей качества работы системы автоматического регулирования с типовым регулятором. 1. Задание Разработать систему автоматического регулирования с заданным типовым регулятором для объекта регулирования, функционирование которого описывается разгонной характеристикой. Исходные данные: а) Разгонная характеристика объекта регулирования для различных вариантов задания приведена в таблице 1. При выполнении задания считать ступенчатое воздействие единичным. б) значение постоянной во времени уставки приведено в таблице 2
План экспериментальной части работы: 1. Выбор типа модели объекта регулирования на основе разгонной характеристики и оценка её параметров. 2. Выбор типа автоматического непрерывного регулятора. 3. Расчет параметров регулятора табличным методом. 4. Синтез модели системы автоматического регулирования с типовым регулятором в среде Matlab System (или иной, аналогичной среде). 5. Получение переходных характеристик системы автоматического регулирования. 6. Оценка достигнутых показателей качества и, при необходимости, ручная подстройка параметров типового регулятора. 7. Оценка достигнутых показателей качества при использовании другого типового регулятора. 8. Выводы по проделанной работе. 1. Выбор типа модели объекта регулирования на основе разгонной характеристики и оценка её параметров. К0=5 τ0=0,04 Т  0= 0,1 0= 0,12. Выбор типа автоматического непрерывного регулятора. Тип регулятора определяется конструкцией и параметрами объекта регулирования. Объекты без самовыравнивания являются труднорегулируемыми. Для объектов регулирования с самовыравниванием классификация их уровней регулируемости и рекомендуемые типы регуляторов приведены в таблице 1.
Определение требуемого типового переходного процесса Конкретный вид переходного процесса, реализуемого разрабатываемой системой автоматического регулирования, определяется исходя из предполагаемых или фактических условий ее применения и основных требований, предъявляемых к системе при регулировании. На практике для большинства задач может быть использован один из типовых процессов регулирования. Удобство использования типового процесса регулирования состоит в том, что для таких процессов существует множество готовых методик настройки регуляторов, не требующих сложных расчетов. Типовыми процессами регулирования являются: – апериодический процесс регулирования; – переходной процесс с 20% перерегулированием; – переходной процесс с минимумом интегрального критерия качества. Типовые процессы регулирования могут выражаться в виде импульсной или переходной характеристики. Ниже будут приведены импульсные характеристики соответствующие различным типовым процессам регулирования. График апериодического процесса регулирования представлен на рисунке 9. 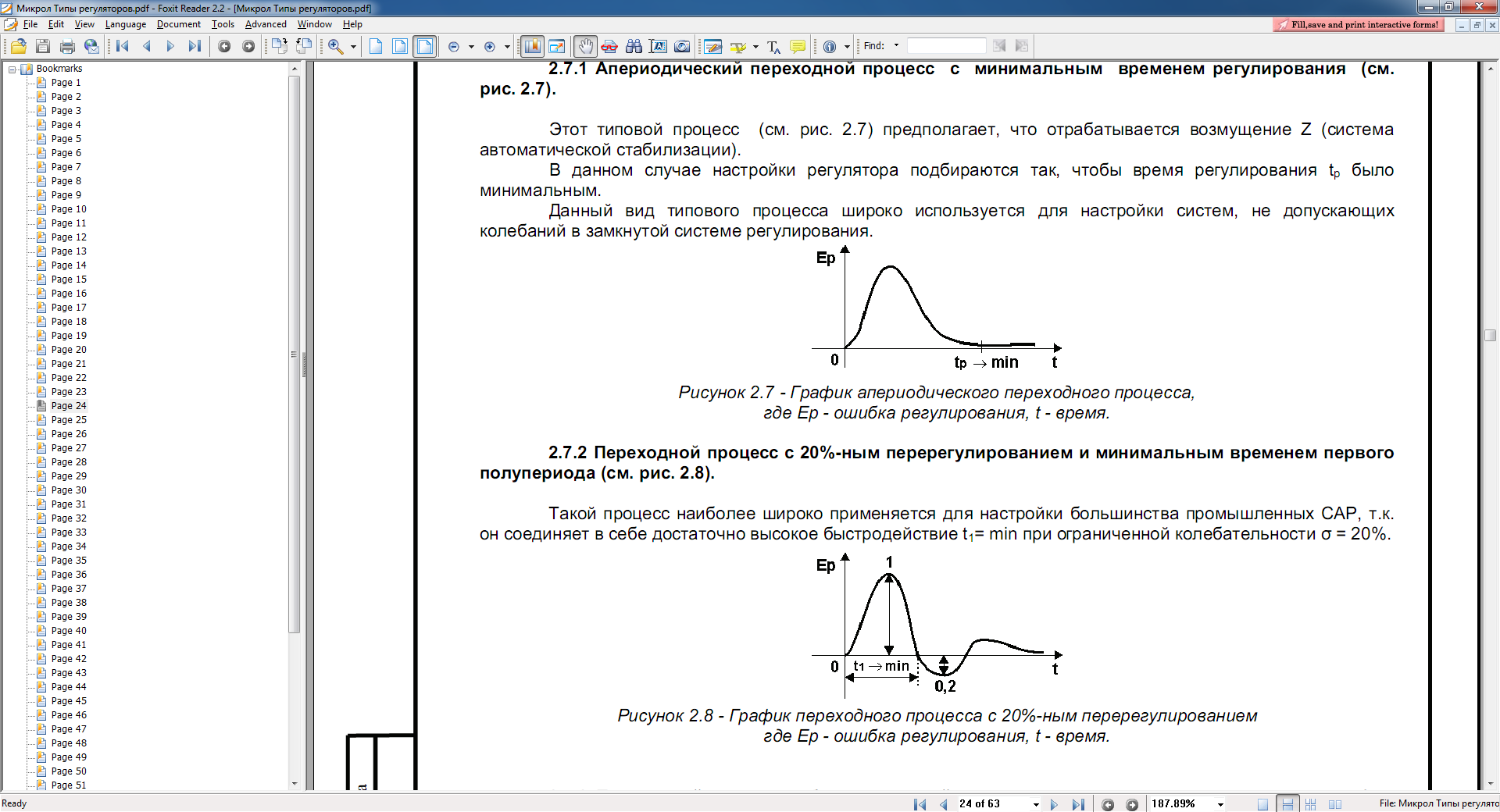 Рис. 9. Апериодический процесс регулирования применяется в случае, если недопустимы колебания регулируемого параметра относительно установившегося значения. Например, апериодический процесс регулирования может быть использован для запуска и остановки эскалатора, так как в момент пуска и остановки на эскалаторе могут находиться люди и колебания дорожки недопустимы, либо данный процесс может применяться для запуска и остановки электродвигателя крановой установки для исключения срыва груза, для включения и отключения источника электропитания с целью исключения повреждения питаемых источником устройств от «всплесков» тока или напряжения и т.д. Основным недостатком апериодического процесса является в общем случае большее время регулирования по сравнению с иными типовыми процессами. График процесса с 20% перерегулированием представлен на рисунке 10. 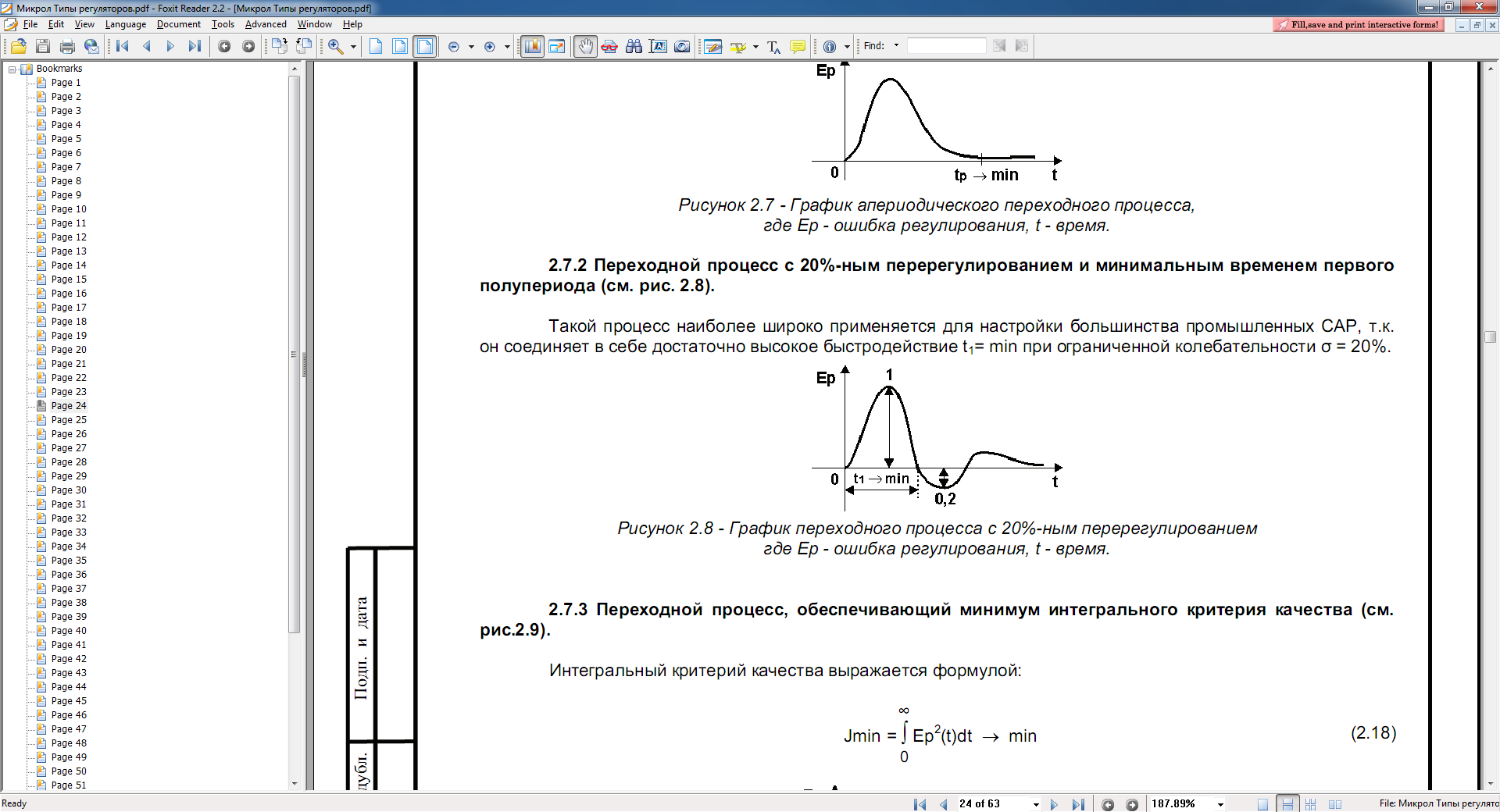 Рис. 10 Такой процесс регулирования применяется для большинства промышленных САР, так как по сравнению с апериодическим обеспечивает большее быстродействие при относительно небольшом 20% перерегулировании. В случае, если в переходном процессе допустимо 20% превышение регулируемым параметром установившегося значения, а приоритетным является быстродействие, следует остановиться на данном типовом процессе. График процесса с минимумом интегрального критерия качества представлен на рисунке 11. 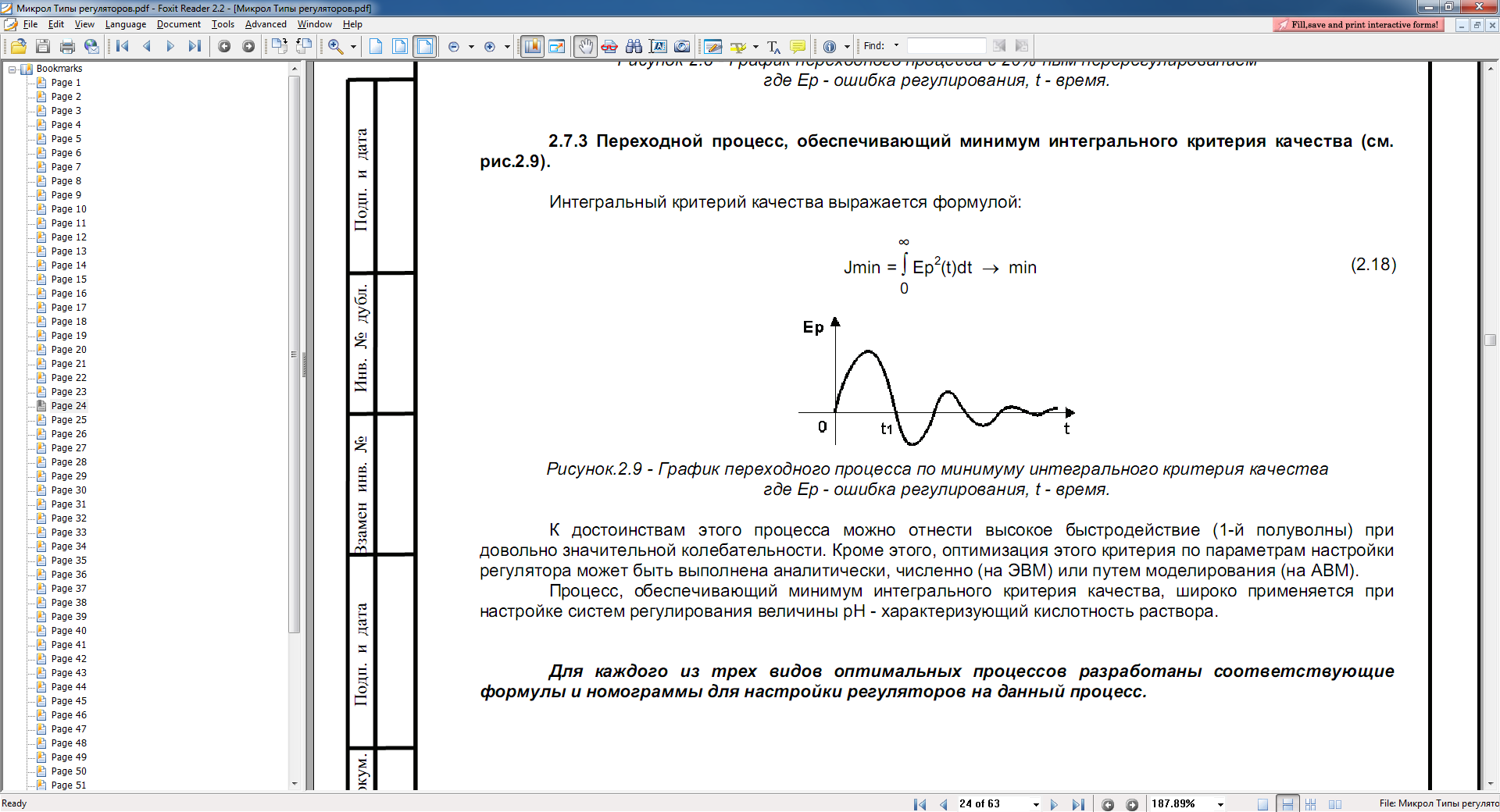  Рис. 11 Критерий качества представляет собой минимум суммарной квадратичной ошибки в переходном процессе:  Как правило, это достигается при 40% перерегулировании, поэтому данный типовой процесс часто называют типовым процессом с 40% перерегулированием. По сравнению с иными типовыми процессами данный процесс обладает самым высоким быстродействием, однако «всплески» регулируемой величины могут достигать 40%. В зависимости от выбранного типового процесса регулирования настройки регулятора должны быть различными. Для регулирования одного и того же технологического процесса в общем случае могут использоваться несколько различных регуляторов, в различной мере позволяющих достичь требуемых показателей качества. Конкретный регулятор должен выбираться с учетом специфики его функционирования и целесообразности применения. Как правило, более сложные регуляторы позволяют обеспечить более высокое качество регулирования, но и их стоимость также выше по сравнению с более простыми регуляторами. Поэтому процесс выбора регулятора обычно представляет собой компромисс между результатами и затратами. Учет специфики функционирования конкретного регулятора в общем случае позволит решить ту же задачу с наименьшими возможными затратами. Окончательный подбор типа регулятора Регуляторы бывают как дискретными, так и непрерывными. Далее приводятся сведения о функционировании и настройке непрерывных регуляторов. Непрерывные регуляторы, как и объект регулирования, представляют моделями, реализованными с использованием типовых звеньев. Среди непрерывных регуляторов выделяют: П-, И-, Д-, ПИ-, ПД-, ПИД-регуляторы. Причем, П-, И-, Д- являются элементарными регуляторами, а ПИ-, ПД- и ПИД – совокупностями элементарных. Реакция регулятора на ступенчатое воздействие представлена на рисунке 12.     Рис.12 Красными точками обозначена пропроциональная составляющая, а зеленым пунктиром - интегральная составляющая результирующего сигнала И-регулятор (интегральный регулятор) И-регулятор представляет собой интегрирующее звено с передаточной функцией:  ПИД-регулятор (пропорционально – интегрально - дифференциальный регулятор) Является наиболее сложным из рассматриваемых регуляторов и представляет собой параллельно функционирующие пропорциональный, дифференциальный и интегральный регуляторы. Передаточная функция регулятора имеет вид: где  , ,  , ,  - коэффициенты передачи интегральной, дифференциальной и пропорциональной составляющей соответственно. - коэффициенты передачи интегральной, дифференциальной и пропорциональной составляющей соответственно.Выходной сигнал ПИД-регулятора представляет сумму сигналов П-, И- и Д- регуляторов:  (17) (17)Реакция регулятора на ступенчатое воздействие представлена на рисунке 17.    Рис. 17 Красными точками обозначена пропорциональная составляющая, зеленым пунктиром – интегральная, а синей точкой с пунктиром - дифференциальная составляющая результирующего сигнала Настройка конструктивных параметров автоматического регулятора Настройка регулятора на практике осуществляется одним из инженерных способов. При этом параметры объекта регулирования могут быть как известны, так и нет. Если при изучении объекта регулирования, анализировалась его разгонная характеристика, то конструктивные параметры объекта регулирования известны. В этом случае приблизительная настройка параметров регулятора на реализацию заданного типового процесса регулирования осуществляется с использованием эмпирических формул, которые позволяют вычислить основные конструктивные параметры автоматического регулятора конкретного типа в зависимости, как от заданного типового переходного процесса, так и от характеристик объекта регулирования. Для удобства расчетные формулы сводят в таблицу 2. Таблица 2
В таблице:  – статический коэффициент передачи регулятора; – статический коэффициент передачи регулятора; , ,  – время изодрома и предварения регулятора соответственно; – время изодрома и предварения регулятора соответственно; – статический коэффициент передачи, замедление отклика и постоянная времени объекта регулирования соответственно. = 0,7 = 0,052 = 0,02 – статический коэффициент передачи, замедление отклика и постоянная времени объекта регулирования соответственно. = 0,7 = 0,052 = 0,02Физический смысл времени изодрома состоит в том, что это интервал времени, в течение которого интегральная составляющая регулятора даёт такое же по величине приращение выходного сигнала, что и пропорциональная составляющая. Экспериментальная часть. Удобно выделить три уровня синтеза модели, отличающиеся уровнем детализации описания: Общая схема экспериментальной установки, включающая в себя систему автоматического регулирования, формирователь уставок, внешних возмущений и устройство индикации. Обобщенная структурная схема системы автоматического регулирования в соответствии с рис.1, включающая в себя взаимодействующие между собой автоматический регулятор и объект регулирования. Структурные схемы автоматического регулятора и объекта регулирования. Сначала САР изображается в виде прямоугольника (блок subsystem) с входами для возмущающих воздействий и для заданного значения регулируемого параметра, к выходу подключают осциллограф (рис.а)  Рис. А Двойным кликом открывается структура блока subsystem и приводится общая структура замкнутой САР в виде взаимодействующих типового регулятора и объекта регулирования (см. рис.б) 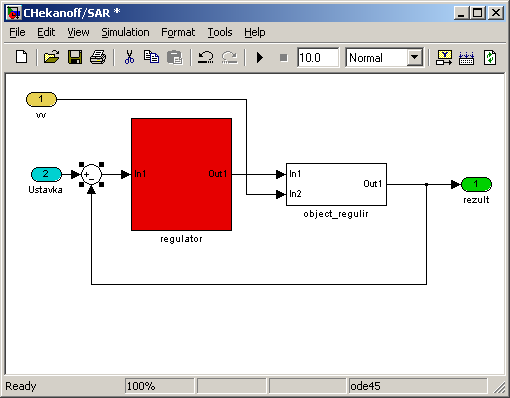 Рис.б. Двойным кликом по блоку регулятора открывается окно моделирования его внутренней реализации, где и приводится типовая структура регулятора П, ПИ, ПИД и т.д, а также настройка его параметров (см. рис.в) 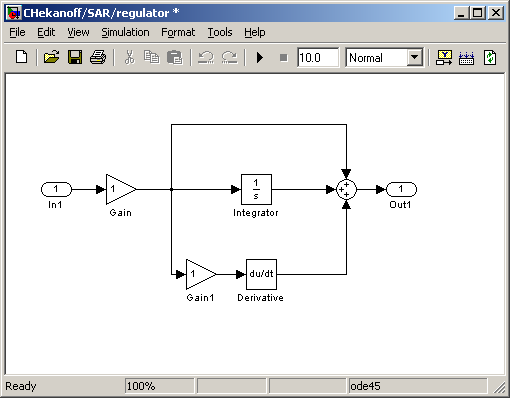 Рис.в Аналогично реализуется модель объекта регулирования (рис. г) 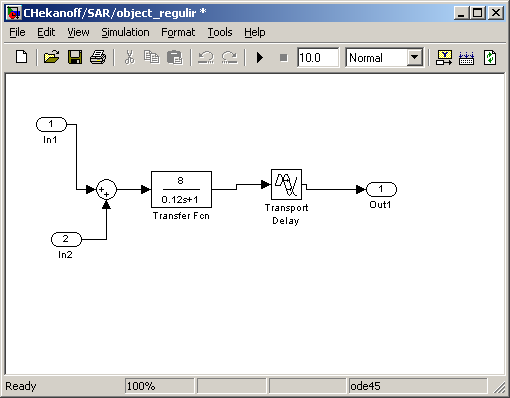 Рис.г. После реализации структурной схемы САР запускается моделирование, как обычно и снимаются достигнутые показатели качества, полученные на основании расчета. При необходимости выполняется дополнительная тонкая ручная подстройка. Вывод: Я получил навыки формализации объекта регулирования и экспериментальной оценки его параметров, обучился инженерным методам настройки типовых регуляторов для обеспечения заданных показателей качества регулирования и методам оценки достигнутых показателей качества работы системы автоматического регулирования с типовым регулятором. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||








 (с 40% перерегулированием)
(с 40% перерегулированием)