Курсовая работа по Теории механизмов и машин. Курсовая ТММ. Литературный обзор
 Скачать 0.68 Mb. Скачать 0.68 Mb.
|

ВВЕДЕНИЕТеория механизмов и машин (ТММ)- наука об общих методах исследования свойств механизмов и машин и проектирования их схем. Курс ТММ входит в общетехнический цикл дисциплин, формирующих знания инженеров по конструирования, изготовлению и эксплуатации машин. Машина осуществляет свой рабочий процесс посредством выполнения закономерных механических движений. Носителем этих движений является механизм. Следовательно, механизм есть система твердых тел, подвижно связанных путем соприкосновения и движущихся определенным, требуемым образом относительно одного из них, принято за неподвижное. Важность курса теории механизмов машин подготовки инженеров конструкторов, проектирующих новые механизмы и машины, очевидна, так как общие методы синтеза механизмов, излагаемые в курсе дают возможность не только находить параметры механизмов по заданным кинематическим и динамическим свойствам, но и определять их оптимальные сочетания с учетом многих дополнительных условий. Большое значение курс ТММ имеет для подготовки инженеров – механиков по технологии изготовления и эксплуатации машин, так как знание видов механизмов и их кинематических и динамических свойств необходимо для ясного понимания принципов работы отдельных механизмов их взаимодействия в машинах. Литературный обзор Наука, изучающая машины, в основу работы которых положены принципы механики с точки зрения исследования законов движения отдельных устройств и действующих на них сил, носит название механика машин. Она состоит из 2 дисциплин. Первая носит название «теория механизмов», а вторая «теория машин». В теории механизмов изучают свойства отдельных типов механизмов, применяемых в самых различных машинах, приборах и устройствах. В теории машин рассматривается совокупность взаимно связанных механизмов, образующих машину. Машина есть устройство, выполняющее механические движения для преобразовании энергии, материалов и информации в целях замены или облегчения физического и умственного труда человека. Наиболее ответственным этапом в проектировании машины является разработка структурной и кинематической схем машины, которые в значительной степени определяют конструкцию отдельных узлов и деталей, а также эксплуатационные качества машины. Система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел, называется механизмом. В любом механизме мы имеем одно неподвижное и одно или несколько подвижных звеньев. В теории машин рассматриваются вопросы теории строения машин, связанные с разработкой методов построения принципиальных схем машин как совокупность механизмов, обеспечивающей оптимальную производительность машины при наивыгоднейших условиях ее работы. Рационально спроектированная машина должна удовлетворять требованиям - безопасности обслуживания и создания наилучших условий для обслуживающего персонала; эксплуатационным, экономическим, технологическим и производственным. Существует несколько классов машин. Они делятся по выполняемым ими функциям: энергетические машины; рабочие машины; информационные машины; кибернетические машины. Процессы преобразования энергии, материалов и информации, выполняемые машиной, в некоторых случаях происходят без непосредственного участия человека. Такие машины получили название машин – автоматов. Совокупность машин – автоматов, соединенных между собой и предназначенных для выполнения определенного технологического процесса, называется автоматической линией. Проблемы теории механизмов могут быть разбиты на 2 группы: анализ и синтез механизмов. Описание работы машины: 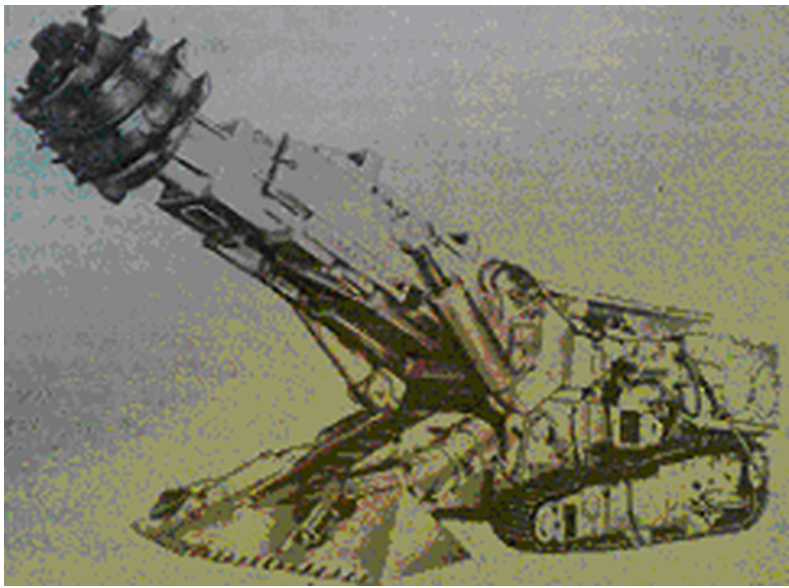 Рисунок 3. Комбайн 4ПП5 Предназначен для проведения горизонтальных и наклонных до 10 подготовительных горных выработок по смешанному и породному забою с крепостью f≤7 и абразивностью до 12 мг. Комбайн может быть использован для работ в угольных шахтах, опасных по газу или пыли, в калийных рудниках и сланцевых, шахтах, а также при строительстве гидротехнических и транспортных тоннелей. Проходческий комбайн 4ПП5 (рис. 2.10) состоит из исполнительногооргана избирательного действия, подъемно-поворотного погрузочного устройства, центрально-расположенного скребкового конвейера, механизма передвижения, корпуса, гидросистемы, электрооборудования, системы пылеподавления, консольного хвостового конвейера, ленточного перегружателя, средств автоматики и программного управления. Проходческий комбайн 4ПП5 обладает повышенной по сравнению с комбайном 4ПП2М мощностью исполнительного органа, большими размерами и прочностью. Исполнительный орган комбайна 4ПП5 стреловидного вида с телескопичностыо 600 мм оснащен коронкой с резцами РКСЗ и предназначен для отбойки горной массы, оконтуривания забоя, проведения приямков под крепь и дренажных канавок и состоит из стрелы, двухскоростного редуктора с электродвигателем, направляющей рамы и гидроцилиндров выдвижения. Рама исполнительного органа с помощью цапф закреплена на опорно-поворотной турели и соединена с гидроцилиндрами подъема. Турель при воздействии гидроцилиндров поворачивается в горизонтальной плоскости. Крепление исполнительного органа на опорно-поворотной турели обеспечивает отбойной коронке перемещения в горизонтальной и вертикальной плоскостях. Питатель с помощью гидроцилиндров может подниматься и опускаться по отношению опорной поверхности гусеницы, что улучшает маневренность комбайна и обеспечивает зачистку почвы выработки. В горизонтальной плоскости питатель поворачивается гидроцилиндром поворота относительно оси нижней поворотной рамы в корпусе комбайна. Корпус состоит из основной сварнолитой рамы, верхней (опорно-поворотной турели) и нижних поворотных рам. Центральная часть основной рамы служит проемом для скребкового конвейера и соединена болтами с хвостовой частью короба скребкового конвейера. Механизм передвижения комбайна 4ПП5 состоит из двух гусеничных тележек с индивидуальным электроприводом. Каждая гусеничная тележка включает в себя раму с натяжным устройством редуктор с электродвигателем, опорные катки и гусеничную цепь. В режиме ручного управления все операции по перемещению выполняются машинистом комбайна с пульта управления. В режиме автоматического управления все операции задаются электрогидроблоком по программе или дистанционно. Электрооборудование комбайна 4ПП5 состоит из группы электродвигателей, магнитной станции, электрогидроблока, пульта управления, фар освещения, сигнальной, предохранительной аппаратуры и аппаратуры автоматического управления Аппаратура автоматизации предназначена для дистанционного и программного управления перемещением исполнительных механизмов, а также автоматического регулирования нагрузки электродвигателя исполнительного органа и вместе с электрогидравлической системой обеспечивает дистанционное управление с переносного пульта, запись программ перемещения исполнительного органа и питателя, воспроизведение записанной программы, стабилизацию заданной нагрузки и защиту электродвигателя исполнительного органа от опрокидывания. Проходческий комбайн 4ПП5 оснащен системами орошения и пылеотсоса. Проходческий комбайн 4ПП5 комплектуется двумя ленточными перегружателями — хвостовым консольным и прицепным, которые предназначаются для перегрузки отбитой горной массы от комбайна на магистральный конвейер или в шахтные вагонетки. Проходческий комбайн - 4ПП5 серийно изготовляется Ясиноватским машиностроительным заводом. Структурный анализ рычажного механизмаЗадачами структурного анализа исследуемого рычажного механизма являются: построение структурной схемы механизма; определение степени подвижности механизма; разбивка кинематической цепи механизма на структурные группы; определение формулы строения механизма. Построение структурной схемы механизмаСтруктурная схема механизма представлена на рисунке 1.1.  Рисунок 1.1 – Структурная схема рычажного механизма Механизм состоит из шести звеньев. Примем следующие условные обозначения звеньев механизма: 0– стойка; 1 – кривошип; 2 – шатун; 3 – коромысло; 4 – кулиса; 5 – кулисный камень. Стойка 0– неподвижное звено. Таким образом, количество подвижных звеньев равно 5-ти. Звенья механизма соединены между собой кинематическими парами. Все пары низшие (вращательные и поступательные), плоские. Обозначим кинематические пары: 1) стойка 0 образует с кривошипом 1 вращательную пару О; 2) кривошип 1 с шатуном 2 – вращательную пару А; 3) шатун 2 с коромыслом 3 - вращательную пару С; 4) коромысло 3 со стойкой 0 – вращательную пару О2; 5) шатун 2 с кулисой 4 – вращательную пару B; 6) кулиса 4 с камнем 5– поступательную пару О5; 7) камень 5 со стойкой 0 – вращательную пару О. Таким образом, количество низших пар (пар пятого класса) 7. Высшие пары (пары четвертого класса) отсутствуют. Определение степени подвижности механизмаСтепень подвижности механизма определяем по формуле Чебышева П.Л. для плоских механизмов W = 3n – 2p5 − p4 = 3n – 2pн − pв, (1.1) где n - число подвижных звеньев; pн - число низших кинематических пар (пятого класса); pв- число высших кинематических пар (четвертого класса). Для исследуемого механизма степень подвижности W = 3 ∙ 5 − 2 ∙ 7 − 0 = 1. Разбивка кинематической цепи механизма на структурные группыСоставим структурные группы механизма и определим класс и вид групп согласно классификации Л.В. Ассура: так как степень подвижности механизма W = 1, механизм имеет одно входное звено – звено 1, закон движения которого задан. Входное звено 1 со стойкой 0 составляют начальный механизм (механизм I класса). Схема механизма первого класса изображена на рисунке 1.2.  Рисунок 1.2 – Схема механизма первого класса шатун 2 и коромысло 3 образуют структурную группу II класса. Эта группа включает в себя три кинематические пары: А, С и О2. Поскольку все три вращательные пары А, С и О2 – внешние, это группа 1-го вида. Схема данной структурной группы изображена на рисунке 1.3.  Рисунок 1.3 – Схема структурной группы II класса 1-го вида, образованной звеньями 2 и 3. кулиса 4 и камень 5 образуют структурную группу II класса. Эта группа включает в себя три кинематические пары: B, О, О5. Поскольку поступательной является одна внутренняя пара О, а две остальные пары (B и О5) – вращательные, это группа 3-го вида. Схема данной структурной группы изображена на рисунке 1.4.  Рисунок 1.4 – Схема структурной группы II класса 3-го вида, образованной звеньями 4 и 5. Таким образом, исследуемый механизм, обладающий одной степенью подвижности, можно рассматривать как образованный путем последовательного присоединения к стойке 0 и ведущему звену 1 двух групп, состоящих из звеньев 2, 3 и 4, 5. По классификации Л.В. Ассура он должен быть отнесен к механизму II класса. Формула строения механизма Формула строения механизма имеет вид I→II1→II3. Таким образом, исследуемый механизм II класса. |