механика Применение основных теорем динамики к исследованию движения материальной точки. Применение основных теорем динамики к исследованию движения мате. Российской федерации федеральное государственное бюджетное
 Скачать 0.79 Mb. Скачать 0.79 Mb.
|

|
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «БАШКИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» ИНСТИТУТ ИСТОРИИ И ГОСУДАРСТВЕННОГО УПРАВЛЕНИЯ КАФЕДРА управления информационной безопасностью КУРСОВАЯ РАБОТА по дисциплине: Механика (название) Применение основных теорем динамики к исследованию движения материальной точки (тема) ВАРИАНТ № 14 Выполнил: Студент очной формы обучения Направление подготовки .03.01 (код) «» (наименование) / (подпись) (инициалы, фамилия) Научный руководитель к.ф.-м.н., (ученая степень, ученое звание) /.. (подпись) (инициалы, фамилия) «__» __________ 2021 г. УФА – 2021 Содержание Введение 3 ВведениеУчебная дисциплина «Механика» в системе высшего образования занимает одно из приоритетных мест, обеспечивает надлежащий уровень подготовленности человека в области безопасности жизнедеятельности в техносфере, безопасности технологических процессов и производств, защиты в чрезвычайных ситуациях, пожарной безопасности. Реализует единый подход для теоретической и практической подготовки будущих специалистов к применению знаний при решении вопросов безопасности жизнедеятельности в техносфере, безопасности технологических процессов и производств, защиты в чрезвычайных ситуациях, пожарной безопасности.1 Хорошее усвоение курса механики требует не только глубокого изучения теории, но и приобретения твердых навыков в решении задач. Для этого необходимо научиться самостоятельно решать разнообразные задачи по всем разделам.2 Кинематика — это раздел, в котором изучается движение механических систем с геометрической точки зрения, без учета причин (сил), вызывающих это движение и изменение движения. Объектом кинематики является точка и твердое тело, т.е. такое тело, расстояние между точками которого не изменяются. Существуют две основные задачи кинематики: математическое описание движений точки и твердого тела; определение кинематических характеристик движения точки (скорости, ускорения) и твердого тела (угловой скорости и углового ускорения). Динамикой называют раздел механики, в котором рассматривается движение тел в зависимости от причин, вызывающих это движение. Глава I. Основные теоремы динамики Общие теоремы динамики – это теорема о движении центра масс механической системы, теорема об изменении количества движения, теорема об изменении главного момента количества движения (кинетического момента) и теорема об изменении кинетической энергии механической системы. 1.1 Теорема о количестве движения Эта теорема устанавливает зависимость между количеством движения материальной точки и импульсом действующей на точку силы. Количеством движения материальной точки называется величина, равная произведению скорости этой точки на ее массу  . То. Количество движения измеряется в [Нс] . То. Количество движения измеряется в [Нс]Проекции количества движения на оси координат равны:    Элементарным импульсом силы называется векторная величина, равная произведению силы на бесконечно малый промежуток времени, в течение которого действует эта сила, т.е. вектор  , имеющий то же направление, что и сила , имеющий то же направление, что и сила  . .Если обозначим импульс силы за время  через через  , то будем иметь: , то будем иметь: Импульс силы за конечный промежуток времени выражается определенным векторным интегралом. Проекции вектора на координатные оси на основании этого равенства выражаются так: Здесь  обозначают проекции силы на координатные оси. Возьмем основное уравнение динамики: обозначают проекции силы на координатные оси. Возьмем основное уравнение динамики: или или  или или  Откуда получим:  Дифференциал количества движения материальной точки равен элементарному импульсу действующей на эту точку силы. Интегрируя это уравнение в пределах от 0 до и обозначая начальную и конечные скорости точки через  и и  , получим: , получим: Или  Это равенство выражает теорему о количестве движения: Изменение количества движения материальной точки за некоторый промежуток времени равно импульсу действующей на эту точку силы за то же время. Если известны количества движения материальной точки и  , то легко построить вектор (рис.20.1) , то легко построить вектор (рис.20.1)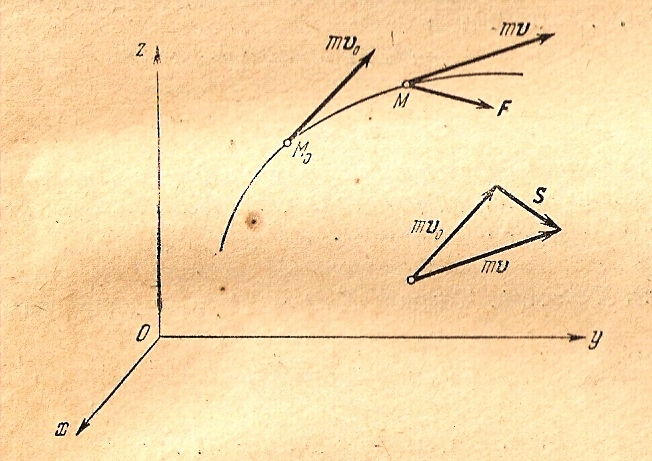 Рис.20.1. Если известен импульс и начальная скорость точки , то по теореме об изменении количества движения находим: Проектируя левую и правую части этого векторного равенства на оси координат, получим:  Изменение проекции количества движения на какую-нибудь ось равно проекции импульса действующей силы на ту же ось. Следствия: Х=0. Тогда  или или  Если проекция силы действующей на данную ось во время движения равна нулю, то проекция скорости движущейся точки на эту ось остается постоянной.  . Тогда . Тогда  и, следовательно, и, следовательно,  . Тогда . Тогда  и, следовательно,: и, следовательно,: 1.2. Теорема о моменте количества движения Пусть точка М массы  движется по некоторой кривой под действием силы (рис.20.2). движется по некоторой кривой под действием силы (рис.20.2).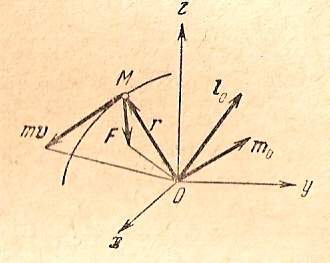 Рис.20.2. Рис.20.2.Построим вектор  , изображающий момент силы относительно начала координат О. Этот вектор направлен перпендикулярно плоскости треугольника, который получим, соединив начало и конец вектора, с точкой О. По модулю он равен удвоенной площади этого треугольника. Проекции этого вектора на координатные оси равны моментам силы относительно этих осей. , изображающий момент силы относительно начала координат О. Этот вектор направлен перпендикулярно плоскости треугольника, который получим, соединив начало и конец вектора, с точкой О. По модулю он равен удвоенной площади этого треугольника. Проекции этого вектора на координатные оси равны моментам силы относительно этих осей.Момент силы относительно точки О можно представить в виде векторного произведения радиуса вектора  точки М на эту силу: точки М на эту силу: Построим вектор  , изображающий момент количества движения относительно данной точки О в виде векторного произведения радиуса вектора на вектор : , изображающий момент количества движения относительно данной точки О в виде векторного произведения радиуса вектора на вектор : Между моментом количества движения относительно данной точки и моментом относительно какой-нибудь оси, проходящей через эту точку, существует такая же зависимость, как и между моментами силы . Поэтому проекции вектора на координатные оси равны моментам количества движения относительно этих осей:   Известны следующие формулы для моментов силы относительно координатных осей:    Где - проекции силы на оси, а х, у, z – координаты точи приложения этой силы.Моменты количества движения относительно координатных осей мы можем вычислить по этим формулам, заменив проекции вектора проекциями вектора на те же оси: Найдем зависимость между векторами  и и  . .Дифференцируя по времени момент движения относительно точки О, получим:  Но   Следовательно:  Но так как векторы и направлены по одной прямой, то  Т.е.  Или  Производная по времени от момента количества движения материальной точки относительно какого-нибудь неподвижного центра О равна моменту действующей на эту точку силы относительно того же центра. Представим полученное равенство в виде:  И спроектируем это равенство на координатные оси. Так как проекция производной от данного вектора на какую-нибудь ось равна производной от проекции этого вектора на ту же ось:    Или  Эти уравнения выражают теорему о моменте количества движения в координатной форме: Производная по времени от момента количества движения материальной точки относительно какой-нибудь неподвижной оси равна моменту действующей на эту точку силы относительно той же оси. Следствия: Пусть момент, действующий на материальную точку силы относительно оси z, во все время движения остается равным нулю, т.е.  . Тогда будем иметь: . Тогда будем иметь: Следовательно,  , т.е. если момент действующей силы относительно какой-либо неподвижной оси вес время равен нулю, то момент количества движения материальной точки относительно этой оси остается постоянным. , т.е. если момент действующей силы относительно какой-либо неподвижной оси вес время равен нулю, то момент количества движения материальной точки относительно этой оси остается постоянным.Пусть линия действия силы во все время движения проходит через одну неподвижную точку О. В этом случае сила называется центральной, а точка О называется центром этой силы. Тогда  и, следовательно: и, следовательно:  и и  В случае центральной силы момент количества движения материальной точки относительно центра этой силы остается постоянным. Под действием центральной силы точка всегда описывает плоскую траекторию, плоскость которой проходит через центр этой силы. 1.3. Работа Кинетической энергией (живой силой) движущейся материальной точки называется скалярная величина, равная  . .Если точка приложения постоянной силы движется по прямой, совпадающей с линией действия силы, то работа этой силы равна произведению ее модуля на длину пути, пройденного точкой приложения силы, взятому с определенным знаком. (плюс или минус).Т.е.  . .Работа считается положительной, если направление силы совпадает с направлением движения точки. Если сила направлена в сторону противоположную движению точки, то работа считается отрицательной и будет равна  . .Если точка весом Р движется прямолинейно по негладкой горизонтальной плоскости, то работа сил трения на пути будет равна:  Где  - коэффициент трения. - коэффициент трения.Предположим, что модуль силы есть величина переменная. В этом случае для вычисления работы на пути  разобьем этот путь на разобьем этот путь на  малых участков малых участков  . Значения переменного модуля силы в начале каждого участка обозначим соответственно через . Значения переменного модуля силы в начале каждого участка обозначим соответственно через  . Величину модуля силы на каждом участке приблизительно можно считать постоянной. Поэтому элементарная работа на пути . Величину модуля силы на каждом участке приблизительно можно считать постоянной. Поэтому элементарная работа на пути  будет равна: будет равна: Взяв сумму элементарных работ и переходя к пределу сумм, получим работу переменной силы на конечном пути. В пределе сумма этих элементарных работ выразится определенным интегралом:  Для того, чтобы вычислить этот интеграл, модуль силы нужно выразить как функцию переменного .Рассмотрим работу движущейся точки в случае криволинейного движения. Пусть точка приложения М силы , переменной по величине и направлению, описывает криволинейную траекторию. Требуется определить работу этой силы на пути  . Разобьем весь путь на большое число малых участков. Пусть один из таких элементарных участков есть . Разобьем весь путь на большое число малых участков. Пусть один из таких элементарных участков есть  . Разложим силу на две составляющие . Разложим силу на две составляющие  и и  (рис.20.3), направленные соответственно по касательной и нормали к траектории в точке М. (рис.20.3), направленные соответственно по касательной и нормали к траектории в точке М. Рис.20.3. Тогда элементарная работа силы на пути  выражается произведением выражается произведением  , взятым, как и в случае прямолинейного движения, со знаком плюс или минус в зависимости от того, совпадает ли направление силы направление силы с направлением скорости точки приложения силы или эта сила направлена в сторону, противоположную направлению скорости точки. , взятым, как и в случае прямолинейного движения, со знаком плюс или минус в зависимости от того, совпадает ли направление силы направление силы с направлением скорости точки приложения силы или эта сила направлена в сторону, противоположную направлению скорости точки.Обозначим проекцию силы на направление скорости точки через  , а угол между векторами и через φ, будем иметь: , а угол между векторами и через φ, будем иметь: Следовательно, элементарная работа равна:  Если угол φ острый , то элементарная работа положительна. Если этот угол тупой, то работа отрицательна, так как касательная силы направлено противоположно направлению скорости точки.Взяв сумму элементарных работ и переходя к пределу, получим работу силы на конечном пути от М0 до М1: Или  Работа силы на конечном пути выражается криволинейным интегралом, взятым вдоль соответствующей дуги траектории, которую описывает точка приложения силы. Если сила во все время движения перпендикулярна к направлению скорости ее точки приложения, то работа этой силы равна нулю. Выражение работы можно представить в виде:  Следовательно,  Выражение  представляет собой элементарную работу силы за время представляет собой элементарную работу силы за время  . .Произведение  есть скалярное произведение силы и скорости , а потому: есть скалярное произведение силы и скорости , а потому: Если обозначим радиус-вектор точки М через  , то , то  Следовательно:  Элементарная работа равна скалярному произведению силы на дифференциал радиуса-вектора точки приложения этой силы. Если разложим векторы и по координатным осям, то получим:  Где проекции силы на эти оси, а  - координаты точки М. Дифференциал радиуса-вектора будет равен: - координаты точки М. Дифференциал радиуса-вектора будет равен: Подставляя полученные значения и  в формулу элементарной работы, и принимая во внимание, что в формулу элементарной работы, и принимая во внимание, что  и и  , получим аналитическое выражение элементарной работы: , получим аналитическое выражение элементарной работы: Где  представляют собой дифференциалы координат точки приложения силы, т.е.: представляют собой дифференциалы координат точки приложения силы, т.е.: Теорема о работе равнодействующей силы: Работа равнодействующей силы на некотором пути равна сумме работ составляющих сил на том же пути. Доказательство: Пусть к материальной точке М приложены две силы  и и  , равнодействующая которых равна , равнодействующая которых равна  . Обозначим работы сил , и на пути соответственно через А1, А2 и А. . Обозначим работы сил , и на пути соответственно через А1, А2 и А.Проектируя векторное равенство  на направление скорости точки М, получим:  Умножая обе части этого равенства на элемент пути  и интегрируя в пределах от 0 до (вдоль траектории точки М), получим: и интегрируя в пределах от 0 до (вдоль траектории точки М), получим: |