Инженерная геодезия. Геодезия. Содержание Введение Способы установки и выверки конструкций и оборудования по вертикал Разновидности способов для установки и выверки конструкций по вертикали лазерные приборы вертикального проектирования общие принципы определения координат,
 Скачать 89.13 Kb. Скачать 89.13 Kb.
|

|
Содержание 1. Введение………………………………………………………………..………………………………………………………………………….3 2. Способы установки и выверки конструкций и оборудования по вертикал………………………………….4 3. Разновидности способов для установки и выверки конструкций по вертикали ………………………….8 4. Лазерные приборы вертикального проектирования ………………………………………………………………...……9 5. Общие принципы определения координат, пунктов и азимутов направления по наблюдению светил.……………………………………………………………………………………………………………………………………….…………12 6. Заключение………………………………………………………………………………………………………………………………….....16 Введение Установка, выверка и закрепление на фундаментах механизмов, машин или их станин, рам и других базовых корпусных деталей — важнейшие монтажные работы, от качества выполнения которых во многом зависит последующая работоспособность смонтированного технологического оборудования. Трудоемкость работ, связанных с установкой оборудования в проектное положение на фундаментах, достигает 50 % от общей трудоемкости его монтажа. Работы по установке оборудования включают в себя подготовку фундаментов и опорных элементов к монтажу; установку, выверку, подливку и окончательное закрепление механизмов, машин или их базовых корпусных деталей. Особенности выполнения отдельных операций при этом зависят от назначения монтируемого оборудования, его конструкции, требований к точности монтажа, способов закрепления и установки, а также типа несущих строительных конструкций, фундаментов. В инженерной геодезии часто приходится переносить точки плановых координат по разным горизонтам. Для этой цели существуют приборы вертикального проектирования, а также для других решений задач в инженерной геодезии. Приборы ПВП используется при строительстве сооружений и зданий, постройке лифтов, сооружении специальных линий. Приборы вертикального проектирования между собой отличаются не только конструкцией, но и принципом работы. По принципу работы их делят на: Механические. Отвесная линия в таких приборах формируется с использованием стержня или струны, а также груза. Точность механического оборудования вертикального размещения зависит от той высоты где будут производится замеры конструкции, а также от способа фиксирования отсчета. Такие механические приборы сегодня практически не применяются, в основном используются оптическое или лазерное оборудование; Оптические. В таких приборах имеется визир, что позволяет производить измерения достаточно точно. Если расстояние измерения составляет 150 метров, то относительная ошибка измерения лежит в пределах 1:30000 – 1:50000. Оптические приборы также имеют свои особенности, их делят на компенсаторные и уровневые. Первые с высокой степенью точности формируют визирную ось; Лазерные. Сегодня такие приборы считаются самыми современными. Они достаточно просты в эксплуатации, надежны, обладают высокой точностью измерения и имеют незначительные размеры. Линия визира задается красным лучом, который генерируется полупроводниковым источником излучения. 2. Способы установки и выверки конструкций и оборудования по вертикали. Установку конструкций и оборудования в вертикальное положение производят различными способами в зависимости от требуемой точности: при помощи отвеса; проектированием наклонным лучом; используя оптическую вертикаль, боковое нивелирование и автоколлимацию. Способ отвесов применяется в основном для предварительной установки и при работах сравнительно невысокой точности. Обычно используют тяжелые отвесы, погруженные в жидкость (в воду или в масло) для уменьшения их колебаний. Ошибка этого способа характеризуется величиной 0,001h, где h — высота конструкции. Для автоматизации и повышения точности измерений применяют электронный центрир, в котором вертикаль задается стальной струной, а отклонение от нее выверяемой конструкции измеряется при помощи индуктивного датчика, жестко связанного с этой конструкцией. Способ проектирования наклонным лучом применяют при установке строительных конструкций. Выполняют его при помощи теодолита. Рассмотрим его на примере самого распространенного случая — вертикальной установки колонн здания. Пусть колонну, установленную в проектное положение в нижнем сечении (рис. 1), необходимо установить по вертикали. Перед установкой колонны выполнена ее разметка, определяющая положение геометрической оси. По направлению, перпендикулярному одной из плоскостей колонны, устанавливают и нивелируют теодолит. Вертикальный штрих сетки нитей теодолита совмещают с риской в нижнем сечении колонны. Трубу теодолита поднимают до уровня верхней метки. Наклоняя колонну, добиваются совмещения верхней риски с вертикальным штрихом сетки. Совмещение верхней и нижней меток с этим штрихом свидетельствует о вертикальности колонны. Аналогичные действия выполняют по другому направлению, перпендикулярному первому.  Рис. 1. Выверка колонн по вертикали: 1 - ориентирная риска, 2 - визирный луч, 3 - установочная риска. К числу основных источников ошибок способа можно отнести: наклон вертикальной оси вращения теодолита; влияние ошибки визирования и нестворность установки теодолита. Способ оптической вертикали предусматривает применение различного рода оптических проектирующих приборов с уровнем или компенсатором. Основными ошибками способа оптической вертикали являются: центрирования прибора над исходным пунктом; приведения линии визирования в вертикальное положение; визирования на марку или отсчета по штрихам палетки; фиксирования точки; влияние внешних условий. Из опыта установлено, что инструментальная точность приборов вертикального проектирования с компенсатором характеризуется средней квадратической ошибкой 0,5 - 1 мм на 100 м высоты. Способ бокового нивелирования широко применяют для выноса осей при детальной разбивке и для установки строительных конструкций в проектное положение (рис. 2).  Рис. 2. Схема разбивки способом бокового нивелирования. Сущность способа состоит в том, что по линии, параллельной основной оси АВ, оптическим визированием, например теодолитом, задается створ А'В'. Точки А' и В' находят путем отложения некоторого расстояния l от точек А и В перпендикулярно линии АВ. Расстояние l выбирают в пределах 1 - 2м, исходя из удобства производства разбивочных работ. Положение оси конструкции определяют при помощи горизонтально устанавливаемой нивелирной рейки. При отсчете по рейке l, равном расстоянию параллельного створа А 'В' от оси АВ, пятка рейки определяет положение этой оси в данном месте. Основными ошибками бокового нивелирования являются: - ошибка разбивки параллельного створа; - ошибка центрирования оптического прибора и визирной цели при задании параллельного створа; - ошибка установки рейки; - ошибка отсчета по рейке. Для примера общая ошибка способа бокового нивелирования при S=100 м; d=50 м – m = 2.4 мм. В способе автоколлимации к устанавливаемой в вертикальное положение конструкции 1 крепится хорошо шлифованное плоское зеркало 2 (рис. 3). На некотором расстоянии от зеркала устанавливают и приводят в горизонтальное положение нивелир 3, снабженный автоколлимационным окуляром. Выверяемую конструкцию вместе с зеркалом наклоняют до тех пор, пока в поле зрения трубы нивелира не совпадут прямое и отраженное от зеркала изображения светового горизонтального индекса. 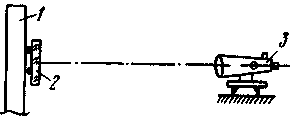 Рис. 3. Схема установки конструкции по вертикали автоколлимационным способом. Для исключения ошибки за не параллельность плоскости зеркала выверяемой плоскости конструкции зеркало поворачивают на 180° ,так, чтобы его опорные поверхности поменялись местами. После этого выверку вертикальности повторяют вновь. Современное развитие ряда областей науки и народного хозяйства приводит к необходимости создания различных уникальных сооружений, нормальная работа которых возможна лишь при соблюдении высокой точности сопряжения элементов технологического оборудования и стабильности их положения во времени. К таким сооружениям относятся: линейные и кольцевые ускорители ядерных частиц, крупные радиотелескопы и антенные комплексы, автоматизированные производственные линии и другие специальные сооружения. Для высокоточного монтажа оборудования таких сооружений, допуски на который характеризуются десятыми долями миллиметра, выполняют специальные геодезические работы. Особенностью их являются применение таких методов и средств измерений, которые обеспечивали бы заданную точность установки и последующего контроля положения оборудования в сложных строительно-монтажных и эксплуатационных условиях. 3. Разновидности способов для установки и выверки конструкций по вертикали. Нитяной отвес наиболее простая установка, чтобы ослабить колебания нитяного отвеса, используют тяжелые отвесы. Нить отвеса подвешивают к оголовке конструкции на небольшой консоли(10-15 см), приваренной или привинченной к колонне, и линейкой измеряют расстояние от грани колонны до нити отвеса вверху и в основании, по разности которых определяют линейную величину наклона , применяют для предваритительного монтажа конструкции. Наклонным лучомприбор (теодолит) устанавливают на некотором расстоянии от конструкции (высота 10-15 м, расстоянии 10-15 м ; высота 50-70 м, расстояние 100-150 м) и тщательно горинзонтируют. Визирную ось наводят на нижнюю осевую метку, и поднимая трубу ,отмечают точку на вверху конструкции. Аналогичное проектирование производят при другом круге и фиксируют среднюю двух точек. Расстояние этой точки от оси конструкции показывает, насколько необходимо наклонить последнюю в плоскости, параллельной коллимационной, чтобы ее ось заняла отвесное положение. При выверки вертикальных осей проектируют при двух кругах верхнюю осевую точку вниз ,но основание, отклонение ∆е от проектного положения оси характеризует линейную величину наклона конструкции γ= Оптическим для построении зенит-прибором оптической вертикали в намеченных направлениях оставляют в перекрытиях небольшие сквозной отверстия. Прибор центрируют над исходной опорной точкой, приводим линию визирования в отвесное положение . На монтажном горизонте выводим на оптическую вертикаль особые консольные марки. Часто вместо марок укрепляют прозрачные пометки с сеткой прямоугольных координат, по которым отсчитывают положение проектируемой вертикали. Для контроля и повышения точности установки отсчета по палетки производят при четырех положениях окуляра и фиксируют среднюю точку. От вынесенных по вертикали опорных точек развивают на монтажном горизонте необходимые сети микротрилатерации и производят вертикальную установку и выверку строительной конструкции. 4. Лазерные приборы вертикального проектирования Лазерные приборы вертикального проектирования выпускаются многими фирмами, производящими геодезическую аппаратуру. В качестве излучателей в этих приборах используется полупроводниковый лазер, генерирующий излучение в видимой, красной (синей) области спектра. Центрирование прибора над точкой производится встроенными лазерными центрирами на высоте до 5 м. Устройства, обеспечивающие вертикальность луча - это компенсаторы, часто комбинированные, например, воздушно-магнитные. Лазерные приборы вертикального проектирования пользуются достаточно большим спросом в Европе и в России. Они с успехом используются для проектирования точек вертикально вверх (вниз), при монтаже строительных конструкций, для контроля вертикальности опалубки в монолитном домостроении и в других работах. Наиболее часто установку и выверку осей конструкций по вертикали выполняют при помощи теодолита способом наклонного визирования. В качестве примера на рис. 4. приведена схема выверки колонны наклонным визированием при помощи теодолитов. При этом теодолит устанавливается на расстоянии не менее высоты конструкции над знаком, закрепляющим ось, или параллельно смещенную ей линию, которую переносят вверх наклонным визированием. Погрешность построения вертикали наклонным визированием зависит от погрешности наклона оси вращения прибора, ошибки визирования и ошибок разметки конструкции. В приборном отношении ошибки выверки зависят от чувствительности уровня при горизонтальном круге и увеличения зрительной трубы теодолита. Таким образом, погрешность построения вертикали теодолитом:  где ошибка наклона оси вращения теодолита (ошибка горизонтирования прибора),  а ошибка визирования  твн - ошибка влияния внешних условий; г - цена деления уровня; h - высота  Рис. 4. Схема выверки вертикальности колонны конструкции; v - увеличение зрительной трубы; s - расстояние от теодолита до верхней точки конструкции. 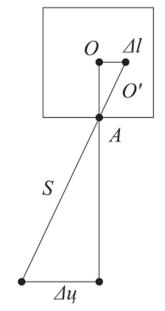 Рис. 5. Ошибка нестворности установки теодолита Если нижняя осевая точка А (рис.5.) и верхняя выверяемая точка О находятся на разных вертикалях, например, первая на срезе цоколя фундамента, а вторая на продольной оси конструкции, то отклонение теодолита от створа этих точек Ац вызовет ошибку установки п . А1/ _ I/ точки О на величину А,: Уд — уs • В этом выражении / - проекция отрезка ОА на горизонтальную плоскость. Выразив смещения через средние квадратические ошибки получим  Если в выверяемой конструкции верхняя и нижняя осевые точки лежат на одной отвесной линии (/ = 0), то нестворная установка теодолита не влияет на построение вертикальной плоскости. Для теодолита 72 (г = 20", v = 30х) при h = s = 50 м и благоприятных условиях получим тп = 2,5 мм. 5. Общие принципы определения координат, пунктов и азимутов направления по наблюдению светил.  направления по наблюдению светил. Рис. 6. U QF – часовой угол t U QY – часовой угол точки весеннего равноденствия tγ =S U Fs - склонение δ U Мs- высота U γF = a прямое восхождение U Qz – склонение зенита s z Светило в горизонтальной системе координат s (A,Z) U SM = A Z = 90 – h В I экватор.с.к. s (t, s) Во II экватор.с.к. s (a, s) Известно, что географическая широта U = hp = dz направление меридианов NS и звезд. время S = tγ = aZ . В момент времени TH (момент наблюдений) могут быть определены, если для TH известны координаты зенита Z, то есть (d, aZ, dz) можно определить относительно звезд следующими способами: 1) путем измерения только зенитных расстояний двух звезд (не менее двух звезд); 2) путем определения азимутов двух светил; 3) при помощи фиксирования моментов происхождения звезд через один и тот же альнуконтарой (круг равных высот); 4) При помощи фиксирования моментов прохождения звезд через их вертикалы Все способы астроопределения географических координат делятся на две основные группы: зенитальные и азимутальные: В зенитальных способах широта и время (долгота) определяются по измеренным светилам или по разности зенитных расстояний или из наблюдения группы звезд. В азимутальных долгота и широта определяются по азимутам звезд или по наблюдению группы звезд по одному вертикалу. Формулы для определения времени; широты и азимута получают из решения параллактического треугольника 1) Z – измерено в TH, s - известные (a, s), по формуле косинусов 2) Если в момент TH определен А азимут светила с координатами (a, s), то по формуле 4- х элементов (котангенсов) Можно определить поправку часов, если известно φ («фи») или широту и поправку местности, если известны поправки часов. Истинными солнечными сутками называется промежуток времени между двумя последовательными нижними кульминациями истинного солнца на меридиане пункта наблюдения. Продолжительность истинных суток меняется 24h00m30s≥d⊙≥23h59m39s ∆d⊙≈51 1. Для обеспечения основного требования времени – это равномерность его шкалы были введена система измерения времени по средне экваториальному солнцу. В качестве вспомогательной точки небесной сферы, относительно которой задается школа времени принята точка, равномерно движущаяся в плоскости экватора со скоростью = средней скорости солнца по эклиптике в течение года ⊙ , ⊙ ср.экваториальное. 2. Отсчетная нить- плоскость истинного меридиана места 3. Начальной точкой отчета – момент нижней кульминации средне экваториального солнца на меридиане места ⊙ – этот момент называется средней полночью. 4. Мерой измерения вр. m = t○ + 12h Поясное время Из – за различия на разных меридианах местного времени пользоваться им не удобно. Особенно не удобно учитывать разность в часах и минутах при переездах с места на место. Поэтому в 1879 г. канадский инженер ж/д - Флеминг предложил ввести систему измерения времени по поясам часовым, которую он назвал поясным временем. Земно шар разделен на 24 пояса каждый пояс. В каждом из поясов счет времени ведется по среднему меридиану, все пояса в направлении с запада на восток имеют нумерацию от 0 до 23, по условиям среднему меридиану нулевого пояса проходит ч/з гр. Tn – поясное время = UT + h Декретное время из экономических соображений 16 июня 1930 года по СССР часы была передвинута на 1 час вперед Dn = To = Tn + 1h – декретное время 1980 года с 1 апреля по 1 октября с 1996 по 1 ноября декретное время стали увеличивать на 1h Dn + 1h – летнее декретное время Dn = Tn + Kn K = 2.1 К = 1 – зимнее время К = 2 – летнее время Dn = UT + n + K Откорректированная система атомного времени называется координированным временем. UTС- на шкале атомного времени ΔUT= UT- UTС, когда достигает 0,7s ,то UTС исправляют на 1s Заключение Научно-технический прогресс не стоит на месте. С каждым днем он охватывает все больше сфер нашей жизни. В последние несколько лет ощутимо возросли темпы строительства. Как следствие, это повлекло за собой и развитие оборудования для геодезии. Любые геодезические приборы на современной строительной площадке являются одним из самых важных и необходимых элементов. Здесь также четко прослеживаются устойчивая взаимосвязь между геодезическими приборами и развитием сегмента высокоточной компьютерной техники. Компьютерные инновации позволили на порядок модернизировать и усовершенствовать геодезическое оборудование. Без такой техники уже сложно представить себе, например, монтаж инженерных коммуникаций в процессе строительства зданий и сооружений. |