Вопрос: Иcпользование РЛС информации для обеспечения безопасного плавания в условиях
ограниченной видимости.
|
Ответ: При использовании РЛС информации в условиях ограниченной видимости прежде всего руководствуются правилом 19 МППСС-72
|
|
Вопрос: Перечислите последовательность действий при настройке РЛС.
|
Ответ:
Регулировку яркости (BRILL), выставить в положение, когда линия развертки практически не видна, но при малейшем повороте вправо становится видимой. Это положение необходимо проверять регулярно, особенно при переключении шкалы дальности (с целью избежания неконтролируемого уменьшения яркости и потере слабых целей);
Регулировку общего усиления (GAIN) установить в положение, когда на экране видны редкие вспышки шума;
Регулировка ВАРУ ("помехи от волнения", ACS, STC, TVG) требует очень тщательной настройки, чтобы избежать подавления слабых целей вблизи судна. Никогда нельзя полностью подавлять помехи от волнения, достаточно на соответствующей шкале добиться изображения движущихся светлых гребней. Так как вероятность обнаружения на экране слабых целей низкая, следует усилить визуальное наблюдение;
Регулировка МПВ ("помеха от дождя", ACR, FTC) улучшает обнаружение цели на фоне ливня и грозового облака, но может до двух раз уменьшить максимальную дальность обнаружения; включать следует только для кратковременного просмотра. Может также применяться для увеличения разрешения по дистанции.
|
|
Вопрос: Основы относительного движения при сближении и расхождении судна на базе векторных построений.
|
Ответ: Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а данные пеленгов и дистанций интересующих нас объектов наносим на планшет в соответствующие точки пересечения окружностей дальности и лучей пеленгов. Для оценки опасности наблюдаемого объекта необходимо построить линию относительного движения ЛОД (линию, по которой относительно нас будет двигаться встречное судно). Для построения ЛОД необходимо, как минимум, две последовательные во времени точки на планшет.
|
|
Вопрос: Какие из правил МППСС-72 регламентируют применение РЛС? Изложите свое понимание.
|
Ответ: Правило 5, 6, 7, 8, 19
|
|
Вопрос: Закономерности относительного движения и типовые случаи перемещения эхосигналов по линиям относительного движения.
|
Ответ:
Эхо-сигнал перемещается параллельно курсу нашего судна
Случай 1: относительная скорость равна сумме скоростей нашего судна и цели (Vо = Vн + Vц) - эхо-сигнал ВСТРЕЧНОГО СУДНА (рис.2, судно А)
Случай 2: относительная скорость равна разности скоростей нашего судна и цели (Vо = Vн - Vц) - эхо-сигнал ОБГОНЯЕМОГО СУДНА (рис.2, судно Б)
Случай 3: относительная скорость равна разности скоростей цели и нашего судна (Vо = Vц - Vн) - эхо-сигнал ДОГОНЯЮЩЕГО НАС СУДНА (ОБГОНЯЮЩЕГО) (рис.2, судно В)
Случай 4: относительная скорость равна скорости нашего судна (Vо = Vн) и эхо-сигнал перемещается от носа к корме - эхо-сигнал неподвижной цели относительно воды.
Закономерности:
при изменении скоростей судов параллельность перемещения эхо-сигналов курсовой черте сохраняется.
при изменении курса нашим судном след послесвечения разворачивается для наблюдателя в сторону, противоположную повороту
разворот следа послесвечения, если наше судно не маневрировало, указывает на изменение курса целью в ту же сторону
эхо-сигнал от неподвижной цели (относительно воды) всегда перемещается параллельно линии нашего курса при всех его изменениях
|
Эхо-сигнал перемещается не параллельно курсовой черте нашего судна.
Случай 1: эхо-сигнал перемещается по линии, пересекающей наш курс, т.е. наблюдаемое судно пересекает наш курс
Случай 2: эхо-сигнал перемещается по линии, проходящей через начало развертки, указывая на реальную опасность столкновения (ЛОД идет в центр)
Случай 3:
эхо-сигнал перемещается по линии, проходящей по корме нашего судна, т.е. наше судно пересекло или будет пересекать курс наблюдаемого судна
Закономерности:
обнаружив глазомерно изменение направления и/или скорости перемещения эхо-сигнала, нельзя сделать однозначный вывод о виде маневра цели из-за сложности закономерностей. Изменение целью курса или скорости можно определить только с помощью радиолокационной прокладки
разворот нашего судна в сторону эхо-сигнала цели
Тенденция изменения направления следов послесвечения при изменении курса нашего судна приводит к изменению направления следа послесвечения от кормы к носу нашего судна (строго говоря, эта простая закономерность действует только в случаях перемещения эхо-сигнала к началу развертки с носовых курсовых углов). В остальных случаях существуют более сложные закономерности, последствиями которых на практике можно пренебречь.
Уменьшение нашей скорости приводит к изменению направления следа послесвечения от кормы к носу нашего судна.
Увеличение нашей скорости приводит к развороту следа послесвечения от носа к корме нашего судна.
Отворот нашего судна от эхо-сигнала цели вызывает сложное изменение направления следа послесвечения, не позволяющее глазомерно оценить эффективность результатов манёвра.
|
Cлучай, когда эхо-сигнал цели не перемещается по экрану РЛС, пеленг на цель и дистанция до неё не изменяются, след послесвечения отсутствует, относительная скорость равна нулю (Vо = 0). Перечисленные признаки указывают на судно – «сателлит», курс и скорость которого совпадают с нашими
Закономерности:
Появление следа послесвечения, параллельно курсовой черте нашего судна, может быть вызвано изменением скорости любого или обоих судов (рис. 14А);
Появление следа послесвечения, непараллельного курсовой черте нашего судна, может быть вызвано изменением курса или курса и скорости любого или обоих судов
|
|
|
Вопрос: Перечислите основные виды помех влияющих на качество РЛ информации. Каким образом можно уменьшить их влияние.
|
Ответ:
Помехи от волнения
Помехи от осадков и низкой облачности
Помехи, вызванные боковыми лепестками диаграммы направленности антенны
Ложные и многократные отражения
Помехи от работающих РЛС
от моря(A/C Sea, или — STC, Sensitivity Time Control). Помехами от моря называются сильные эхосигналы, отражающиеся от гребней волн при волнении на море и закрывающие центральную часть экрана. Регулятор STC как раз и используется для подавления отражений от волн вблизи собственного судна. Однако при использовании этой функции РЛС частично могут подавляться и полезные сигналы, поэтому необходимо правильно отрегулировать подавление помех от моря;
от дождя (A/C Rain, или — FTC, Fast Time Constant). Данный тип регулятора РЛС отвечает за подавление отраженных эхосигналов от различных осадков (дождя, града и снега) для очистки изображения на экране. Здесь так же, как и с предыдущим регулятором, необходимо следить за тем, чтобы полезные эхосигналы не "затерялись" на экране в эхосигналах от осадков или же не были скрыты вместе с ними.
от РЛС других судов. Данный тип регулятора позволяет полностью или частично устранить помехи от радиолокационных станций других судов. Если радиолокационные помехи отсутствуют, необходимо выключить эту функцию.
|
|
Вопрос: Изложите выполнение операций процесса обработки и использования радиолокационной информации при ведении ручной прокладки на маневренном планшете.
|
Ответ:
|
|
Вопрос: Объясните значение зон безопасности, маневрирования, обнаружения, их пределы и соответствия.
|
Ответ:
Хорошая морская практика для решения задачи расхождения с судами в открытом море рекомендует разделить экран РЛС на три зоны:
1) зона оценки ситуации от 12 до 8 миль, где определяются степень опасности столкновения, параметры движения встречных судов и проигрывается маневр расхож-дения;
2) зона маневрирования от 8 до 4 миль. Действия для расхождения рекомендуется принимать как можно скорее после установления опасности столкновения;
3) зона чрезмерного сближения от 4-х миль. До входа эхо-сигнала судна в эту зону маневр расхождения в открытом море должен быть завершен, чтобы при изменении ситуации в результате неверных маневров судов имелось время и пространство для устранения опасности столкновения.
|
|
Вопрос: Изложите процесс векторных построений на планшете, оценку ситуации, выявление реальной и потенциальной опасности, выбор и обоснование вида маневра, расчет выбранного маневра.
|
Ответ:
На маневренном планшете наносится начальная ситуация:
положение цели (целей) на начальный момент времени по первым измерениям пеленга и дистанции;
положение цели (целей) через выбранный интервал времени (обычно 3 или 6 мин) по вторым измерениям пеленга и дистанции и, если позволяют обстоятельства;
положение цели (целей) через тот же интервал времени по третьим измерениям пеленга и дистанции (последние измерения должны предупредить промах).
Параллельно с нанесением начальной ситуации начинают обработку радиолокационных измерений на планшете:
уже после получения первого положения цели - точки 0 наносят вектор нашей скорости Vн за соответствующий период времени,
через точки 0-1-2 после их нанесения проводят ЛОД цели. Соединяют точки 0-2, получая вектор относительной скорости Vо - основной информационный элемент,
соединив начало вектора нашей скорости с точкой 2, определяют вектор скорости цели Vц, т.е. завершают решение векторного треугольника (векторы Vн, Vо и Vц должны быть за одинаковый интервал времени).
Получают данные для оценки ситуации:
Дкр определяют по длине перпендикуляра из центра планшета на ЛОД,
Ткр рассчитывают, откладывая по ЛОД отрезки равные Vо, так как они соответствуют интервалу времени 0-2,
если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме - точку пересечения нашим судном курса цели (из центра планшета проводят линию, параллельную Vц до пересечения с ЛОД),
Тпер рассчитывают аналогично Ткр до точки пересечения курса,
курс цели Kц определяют по направлению вектора ее скорости, а скорость цели Vц - по величине вектора Vц.
Получив необходимые данные и используя линейные и временные факторы опасности (см.схему на рис.1), оценивают ситуацию: определяют, имеется ли реальная или потенциальная опасность столкновения с каждой целью, и, если опасность существует, переходят к выбору и обоснованию маневра. На этом этапе должно быть определено, с кем следует расходиться, что для этого нужно сделать и когда выполнять маневр. Выбор и обоснование маневра будут рассмотрены ниже. Пока же достаточно отметить, что при этом учитывают условия и обстоятельства конкретного случая, требования МППСС-72, закономерности перемещения эхо-сигналов на экране РЛС и маневренные элементы своего судна;
Для расчета выбранного маневра:
наносят на ЛОД упреждающую точку 1, соответствующую условному моменту окончания маневра (12 мин);
прокладывают ожидаемую линию относительного движения цели (ОЛОД), которая представляет собой касательную к окружности Дзад, проведенную из упреждающей т. 1;
из точки 2векторного треугольника начальной ситуации проводят новое направление вектора Vо - оно всегда соответствует направлению ОЛОД - и делают на нем засечку величиной Vн определяя точку начала нового вектора относительной скорости Vо, новое положение вектора Vн, а так же точное значение угла отворота, если выбран маневр изменением курса.
Если же выбрано изменение скорости (уменьшение), новое значение вектора Vн определится отрезком Vн до пересечения этого вектора с вектором Vо'. Из рис. 19 видно, что возможен и комбинированный маневр: из центра планшета проводят новый вектор Vн' одновременно зачеркивая, что бы не путаться, старый вектор Vн.
|
|
Вопрос: Дайте определение термина безопасная скорость. Поясните причины назначения безопасной скорости и перечислите факторы, которые необходимо учитывать при этом.
|
Ответ:
Beличина безопасной скорости не остается постоянной. Если оценка ситуации в имеющихся условиях и обстоятельствах плавания не дает уверенности в том, что скорость, с которой следует судно, безопасна, ее уменьшают. Уменьшают скорость и для того, чтобы иметь больше времени для оценки ситуации, особенно при недостаточном опыте плавания в данном районе.
МППСС-72 правило 6
|
|
Вопрос: Ограничения РЛС, теневые секторы, ложные эхосигналы, радиолокационное затемнение, оптимальность настройки радиолокационного изображения.
|
Ответ:
Вместе с преимуществами у радиолокационной информации существуют серьезные недостатки. Так, изображение на экране не позволяет передать все качественное разнообразие информации, полученное с помощью зрительного наблюдения. В частности, оно не дает возможности передать привилегии cудна, дающие ему право преимущественного прохода (судно с кабелем, тралом и т. д.). Существенным недостатком является также запаздывание информации о движении (скорость, расстояние до сближения, курс судна и др.). Еще один важный недостаток радиолокационной информации заключается в ненадежности обнаружения объектов с низкой отражательной способностью (лодки, катера и т. п.), особенно при наличии помех, и возможности перепутать эхо-сигнал малого судна с эхо-сигналом буя или другого предмета. В практике судовождения известны случаи, когда РЛС вообще не могла обнаружить встречное судно.
Важное ограничение РЛС - относительная сложность и длительность обработки радиолокационной информации путем ручной радиолокационной прокладки на специальном маневренном планшете или путевой навигационной карте.
Теневые секторы. Секторы, образованные мачтами, трубами, антеннами и другими палубными надстройками можно определить с помощью небольшого катера или шлюпки вооруженных уголковым отражателем. Такой катер (шлюпка) обходит вокруг судна, а на экране РЛС фиксирует теневые секторы. Схема определенных таким образом теневых секторов (их расположение) вывешивают в штурманской рубке и ходовом мостике.
Оптимальные настройки:
Когда настраиваешь радар, регулятор «Gain» крутишь на увеличение до тех пор, пока не станет появляться шум фона (помехи) на экране. Тут нужно остановиться и даже можно слегка подкрутит на уменьшение. Т.е. шум на фоне должен быть слегка видимым. Так Вы скорее увидите слабые цели и у Вас будет хороший контраст между целями и фоном. Но это не всё, что нужно учитывать. У Вас есть ещё ряд регуляторов: Sea, Rain и Tune.
Sea и Rain — это шумоподавление от моря и дождя соответственно. Здесь ничего сложного нет, но нужно быть осторожным. Некоторые забывают оптимально настраивать шумоподавление из-за чего не видят некоторые цели. Плюс некоторые сомневаются, может ли быть шумоподавление на нуле? Вполне, если штиль и погода хорошая, то и Rain и Sea могут быть на нуле.
С Tune ещё проще, нужно крутить регулятор до тех пор, пока не добьёшься максимального значения индикатора на экране. Регулируем настройку TUNE, добиваясь наиболее яркого эха от целей.
Использование GAIN (усиления видеосигнала)
Всегда следует регулировать настройку параметра GAIN, когда работа осуществляется при больших диапазонах дальности в 12 или 24 морских миль (от 24 до 48 км). При работе с большими дальностями необходимо иметь на отображении легкий точечный фон, что позволит обеспечить наилучшее обнаружение целей. При наличии снега или дождя временное уменьшение коэффициента усиления может оказаться полезным в процессе поиска целей. Усиление видеосигнала может подстраиваться независимо в режимах АUТО (автоматический) и МАN (ручной) борьбы с помехами.
Использование ручной регулировки борьбы с помехами SЕА
Используйте регулировку борьбы с помехами SЕА для уменьшения уровня обусловленных морем помех до такого состояния, когда на экране будут присутствовать лишь отдельные остаточные отметки. Настройка должна позволять различать малоразмерные цели, сила отраженного сигнала от которых зачастую соразмерна с отметками, обусловленными морем.
Этой регулировкой всегда следует пользоваться с большой осторожностью. Избегайте установки регулировки на такой уровень, когда с экрана исчезают все помехи, обусловленные влиянием моря, поскольку это ухудшит обнаружение малоразмерных целей. Эту настройку следует периодически проверять, по мере изменения превалирующих условий на море.
Использование ручной регулировки борьбы с помехами RAIN
Используйте регулировку борьбы с помехами RAIN для оптимизации подавления помех, обусловленных дождем, т.е. постарайтесь сбалансировать обнаружение целей в регионе при наличии помех от дождя с обнаружением этих же целей вне района, охваченного дождем.
Этой регулировкой всегда следует пользоваться с большой осторожностью. Чрезмерное подавление может привести к пропуску малоразмерных целей. Зачастую наилучшим способом применения этой регулировки является ее использование для поиска целей в регионе с помехами с последующим возвратом ее в нулевое положение после окончания поиска.
Использование автоматической регулировки для борьбы с помехами
В условиях открытого моря для подавления помех, обусловленных влиянием моря и дождя, используйте режим АUТО (автоматический). Этот режим обычно обеспечивает оптимальное обнаружение путем адаптации уровня подавления помех по уровню принимаемых мешающих сигналов.
Импульсы, принимаемые от радарных ответчиков, оказываются слегка ослабленными. Однако, они все еще достаточно отличаются от помех по силе сигнала.
выбор ручной или автоматической регулировки подавления помех
1. Установите курсор экрана на поле выбора MAN/АUTО.
2. Щелчок левой клавиши переключает режимы управления между МАN (ручное) или АUТО (автоматическое).
РУЧНОЕ ИЗМЕНЕНИЕ НАСТРОЕК GAIN,RAIN & SЕА
1. Установите курсор экрана на ту регулировку, которую Вы хотите изменить.
2. Щелкните левой клавишей для активизации линейки управления. Линейка высветится желтым цветом.
3. Переместите манипулятор курсора влево или вправо, чтобы установить требуемый уровень на линейке.
4. Щелкните левой клавишей для установки выбранного уровня и деактивизации линейки. Линейка вернется в недоступное затемненное состояние.
|
|
Вопрос: Принципы выбора и обоснования маневра с учетом навигационных условий плавания и МППСС-72
|
Ответ:
Суда, следующие вдоль узкого прохода или фарватера или пересекающие узкость, должны в полной мере использовать радиолокатор, как и другие навигационные средства, для выполнения Правила 9 МППСС-72.
При плавании в узкости в условиях ограниченной видимости судоводитель с помощью РЛС контролирует движение судна по намеченному пути следования и обеспечивает безопасное расхождение с судами. Радиолокационная прокладка должна обеспечивать решение обеих задач и учитывать не только подвижные цели - суда, но и плавучие средства навигационного оборудования.
В узкости манёвр, который выбирают и обосновывают для расхождения, должен одновременно и в равной степени обеспечивать и навигационную безопасность своего судна.
При этом, учитывая стационарность СНО, расчёту манёвра для расхождения с судном должен всегда предшествовать расчёт выхода своего судна в поворотную точку, который зачастую обуславливает выбор момента для расхождения с судном или вид манёвра.
В узкости, где весьма вероятно появление судов на носовых курсовых углах, для расхождения с такими судами предпочтительнее манёвр курсом. Маневр скоростью в таких ситуациях приведет только к изменению Ткр, но не к расхождению. Если отворот будет предпринят сразу же после оценки и вправо при отсутствии какого-либо объекта на траверзе или позади траверза, весьма вероятно, что другое судно сохранит свой курс и скорость неизменными. Таким образом, инициатива в действиях не приведет к усложнению ситуации.
Нередко судоводитель, имея помеху справа, при решении задачи на расхождение со встречным судном даже не пытается рассчитать поворот вправо, а сразу же отворачивает влево (особенно часто это бывает, если радиолокационная прокладка не ведется.)
|
|
Вопрос: Перечислите элементы полной радиолокационной информации и поясните методику их графического расчета.
|
Ответ:
Полная радиолокационная информация - есть сумма объективных характеристик, определяющих ситуацию сближения, степень опасности объектов, уровень срочности принятия необходимых мер и включает следующие элементы:
 - дистанция кратчайшего сближения - расстояние между нашим судном и судном-целью в момент кратчайшего сближения. Определяется величиной перпендикуляра, опущенного из центра планшета на ЛОД цели. Измеряется целыми и десятыми долями мили. - дистанция кратчайшего сближения - расстояние между нашим судном и судном-целью в момент кратчайшего сближения. Определяется величиной перпендикуляра, опущенного из центра планшета на ЛОД цели. Измеряется целыми и десятыми долями мили.
 - время кратчайшего сближения - время движения судна от точки "3" до точки кратчайшего сближения (другими словами - до точки на ЛОДе, в которую опущен перпендикуляр из центра планшета). Измеряется в минутах. - время кратчайшего сближения - время движения судна от точки "3" до точки кратчайшего сближения (другими словами - до точки на ЛОДе, в которую опущен перпендикуляр из центра планшета). Измеряется в минутах.
 - дистанция, в которой происходит пересечение курса нашего судна судном-целью или курса судна-цели нашим судном. Определяется расстоянием, измеренным от центра планшета до точки пересечения. Измеряется в целых и десятых долях мили. Имеет два решения: - дистанция, в которой происходит пересечение курса нашего судна судном-целью или курса судна-цели нашим судном. Определяется расстоянием, измеренным от центра планшета до точки пересечения. Измеряется в целых и десятых долях мили. Имеет два решения:
1) ЛОД проходит у нас по носу. равна расстоянию от центра планшета до точки пересечения ЛОДом нашего курса.
2) ЛОД проходит у нас по корме. В этом случае, для определения , из центра планшета проводим линию, параллельную вектору цели до пересечения с ЛОДом. Величина равна расстоянию от центра планшета до точки, в которой находилась цель в момент пересечения ее курса нашим судном.
 - время пересечения курсов. Выражает степень временной опасности. Определяется промежутком времени, за который эхо-сигнал цели пройдет расстояние от точки "3" до точки пересечения. Измеряется в минутах по ЛОД цели. - время пересечения курсов. Выражает степень временной опасности. Определяется промежутком времени, за который эхо-сигнал цели пройдет расстояние от точки "3" до точки пересечения. Измеряется в минутах по ЛОД цели.
|
|
Вопрос: Режимы стабилизации движения и ориентации изображения на экране РЛС
|
Ответ:
Head-Up (ориентация направление)
Режим " Курс Вверху "
Дисплей без азимутальной стабилизации, в котором линия, соединяющая центр с верхом дисплея, показывает собственный курс судна. Отметки цели изображаются на их измеренных дистанциях и в их направлениях, относительно собственного курса судна. Короткая линия на шкале пеленга является Маркером Севера, показывая компасный Север.
Режим " Заданный Курс Вверху "
Азимутально стабилизированный дисплей, в котором линия, соединяющая центр с верхом дисплея, показывает собственный заданный курс судна ( а именно, собственный предыдущий курс судна непосредственно перед тем, как этот режим был выбран.)
Отметки цели изображаются на их измеренных дистанциях и в их направлениях относительно заданного курса, который поддерживает позиции 0 градусов, в то время, как курсовая линия двигается в соответствии с лавированием судна и изменением курса. Этот режим полезен для избежания смещения изображения во время изменения курса.
Course-Up (ориентация курс)
Режим "Курс Вверху / Истинный Пеленг"
Эхосигналы радара показываются таким же образом, как в режиме НU. Отличие от обычного НU представления заключается в ориентации шкалы пеленга. Шкала пеленга является "компасно" стабилизированной. То есть, оно вращается в соответствии с компасным сигналом, позволяя вам на взгляд определить собственный курс судна. Этот режим доступен, только когда радар связан с гирокомпасом. Если компас неисправен, то шкала пеленга возвращается в состояние при режиме НU.
North-Up (ориентация север)
Режим "Север вверху"
В режиме "Север вверху" отметки цели изображаются на их измеренных дистанциях и в их истинных (компасных) направлениях от собственного судна, пеленг на север поддерживается вверху экрана. Линия курса изменяет свое направление согласно курсу судна. Если гирокомпас неисправен, режим представления изменяется на НU и маркер севера исчезает.
Режим Истинное движение
Собственное судно и другие движущиеся объекты перемещаются в соответствии с их истинными курсами и скоростями. В режиме ТМ
стабилизированном относительно земли, все фиксированные цели, такие как земные массивы, появляются как стационарные эхосигналы. В режиме
ТМ стабилизированном относительно моря, без ввода сноса и дрейфа земные массы могут двигаться на экране. Когда собственное судно достигает точки,
соответствующей 75% радиуса дисплея, автоматически смещается в точку на 75% радиуса направлению противоположному направлению маркера курса, проходящего через центр дисплея. Смещение может быть сделано в любой момент, до того как судно достигнет предела. Если компас не исправен, режим изменяется на HU и маркер севера исчезает.
|
|
Вопрос: Принцип работы САРП и степень доверия.
|
Ответ:
САРП совместно с РЛС предназначены для повышения безопасности плавания судов в районах интенсивного судоходства, вблизи берегов, в зонах разделения движения, в узкостях и по фарватерам в любых гидрометеорологических условиях.
САРП – датчик информации, необходимый судоводителю для правильной оценки ситуации встречи с другими судами и принятия обоснованного решения для успешного расхождения с ними.
САРП выполняет обработку радиолокационной информации и позволяет производить:
ручной и автоматический захват целей и их сопровождение;
отображение на экране индикатора векторов относительного и истинного перемещения целей;
выделение опасно сближающихся целей по установленным критериям: расстоянию кратчайшего сближения Dкр и времени кратчайшего сближения tкр ;
индикацию на буквенно-цифровом табло основных параметров движения и элементов сближения целей;
проигрывание маневра курсом и скоростью для безопасного расхождения;
автоматизированное решение навигационных задач: счисление пути судна, определение суммарного сноса;
отображение элементов содержания навигационных карт;
определение обсервованных координат местоположения судна на основе радиолокационных измерений.
Степень доверия САРП:
Судоводители должны достигнуть понимания того, что САРП являются только навигационным средством, а также того, что:
- их ограничения, включая ограничения внешних датчиков, делают чрезмерное доверие САРП опасным, в частности для ведения наблюдения; и
- необходимо постоянно соблюдать Принципы несения ходовой навигационной вахты и Руководство по несению ходовой навигационной вахты.
- эксплуатационные параметры внешних датчиков САРП - радиолокаторов, компасов и лагов, а также влияния неправильного функционирования датчиков на точность информации, выдаваемой САРП;
- влияния ограничений разрешающей способности радиолокатора по дальности и пеленгу, а также точности и ограничений компаса и лага на точность информации, выдаваемой САРП; и
- факторов, влияющих на точность вектора.
|
|
Вопрос: Векторное представление информации о степени опасности ракурсов судов, выбор лимитирующего судна для осуществления маневра на расхождение.
|
Ответ:
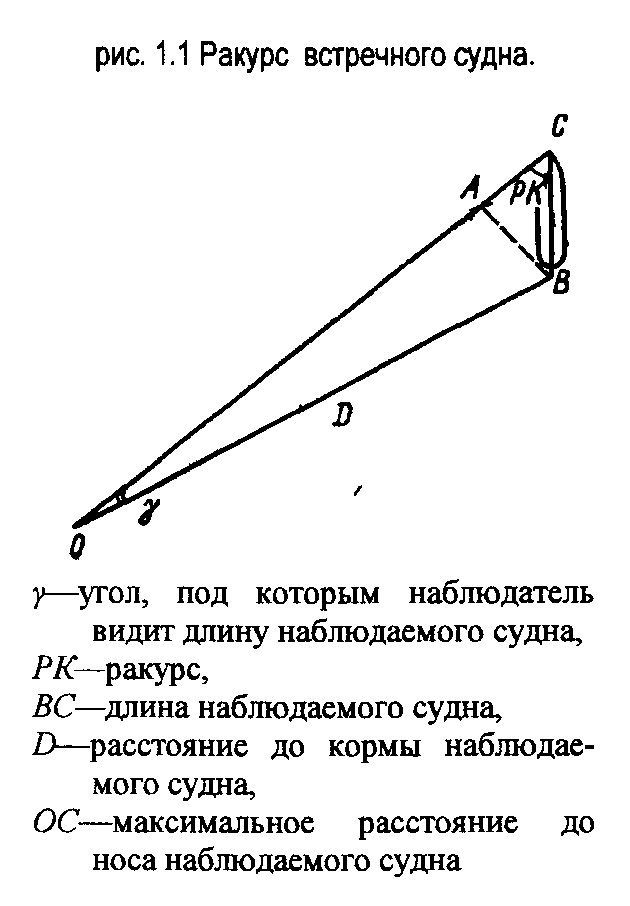
Ракурс наблюдаемого судна
Эхо-сигнал наблюдаемого судна ни в коем случае не дает правильного представления о ракурсе (перспективном положении) наблюдаемого судна, хотя такое впечатление иногда и создается при наблюдении эхо-сигналов на экране радиолокатора. Для установления ракурса наблюдаемого судна необходимо произвести истинную прокладку.
при ночных наблюдениях ошибка в определении РК обратно пропорциональна расстоянию между топовыми огнями;
поскольку малое судно несет только один топовый огонь, а большое судно—два огня, судоводитель большого судна находится в худших условиях с точки зрения определения ракурса встречного судна (так как шибка ракурса ∆РК малого судна больше ∆РК, большого судна);
поскольку ∆РК обратно пропорциональна L, а в ночное время l, то можно сказать, что увеличение расстояния между мачтами увеличивает точность определения РК судна ночью.
|
|
Вопрос: Перечислите необходимые действия для настройки и управления САРП.
|
|
|
Вопрос: Эксплуатационные требования к САРП.
|
Ответ:
Рассмотрим основные требования IМО к технико-эксплуатационным характеристикам САРП.
1. Наблюдаемые на экране и сопровождаемые (обрабатываемые процессором) цели должны четко обозначаться специальными маркерами. В случае потери цели, т.е. когда она процессором не обрабатывается, обозначение маркера должно изменяться. Это позволяет судоводителю более четко контролировать не обрабатываемые в данной зоне цели.
2. Параметры курса и скорости сопровождаемых целей должны отражаться в векторной или другой графической форме на экране в режиме истинного и относительного движения цели с возможностью переключения временного масштаба. Это позволяет судоводителю наглядно представлять взаимное положение на наперед заданный отрезок времени. При этом необходимо иметь ввиду, что процессор рассчитывает и отображает информацию на экране о положении целей при предположении неизменности их курса и скорости на время прогноза.
Информация САРП не должна маскировать радиолокационное изображение в такой степени, чтобы ухудшилось обнаружение целей. Должна быть предусмотрена возможность сброса ненужной информации САРП.
Длина отображаемых векторов должна или регулироваться судоводителем, или иметь фиксированное время экстраполяции.
При этом четкость изображения знаков выбирается таким образом, чтобы была обеспечена их видимость более чем одним наблюдателем (стоя, сидя, находящихся на удалении, под углом к дисплею и т.п.).
Условные знаки для экранов РЛС/САРП разрабатываются и принимаются IМО. При этом учитывается необходимость обеспечения совместимости символов, используемых в навигации, САРП и в устройствах с отображением электронных карт.
3. Количество одновременно автоматически сопровождаемых целей с отображением информации на экране – важный качественный показатель САРП. Согласно требованиям IМО в САРП с ручным захватом должны одновременно обрабатываться не менее 10 целей, с автоматическим захватом – не менее 20 (независимо от того, производится захват автоматически или вручную).
Автоматический или ручной захват не должен уступать по качеству тем результатам, которые могут быть получены при визуальном обнаружении целей по экрану РЛС.
САРП должен обеспечивать ручной захват на автосопровождение судов с относительной скоростью движения до 100 узлов.
Если предусматривается автоматический захват, то критерий захвата цели указывается в технической документации. Кроме того, судоводитель должен иметь возможность выбрать желаемую зону автозахвата. Если сопровождаются не все цели, наблюдаемые на экране индикатора, то сопровождаемые цели должны быть четко обозначены. Надежность сопровождения должна быть не хуже той, которая обеспечивается при ручной радиолокационной прокладке непосредственно по данным РЛС.
При отсутствии перебросов сопровождения целей САРП должно обеспечивать сопровождение захваченной цели, отчетливо различимой на экране индикатора в пяти из 10 последовательных обзоров.
В САРП должны быть приняты меры по уменьшению вероятности ошибок сопровождения, в том числе вызванных перебросами стробов сопровождения. Качественное описание влияния источников ошибок на сопровождение, включая влияние малых отношений сигнал/шум и сигнал/помеха, вызванных отражением от моря, дождя, снега, низких облаков и несинхронными излучениями, указывается в эксплуатационной документации.
4. Согласно требованиям IМО, кроме индикации векторов движения, для любой сопровождаемой цели на экране ИКО или отдельном табло в буквенно-цифровой форме представляется формуляр цели. Он включает следующие параметры:
Dц – расстояние до цели;
Пц – текущий пеленг на цель;
Кц – истинный курс цели;
Vц – истинная скорость цели;
Dкр – рассчитанная дистанция кратчайшего сближения;
Ткр – расчетное время до кратчайшего сближения.
5. Известно, что точность определения параметров движения наблюдаемых целей и элементов сближения с ними сильно зависит от направлении встречи судов (курсовых углов, дистанций между ними и их скоростей). Поэтому IМО в своих требованиях определило 4 контрольных операций, при которых должны проверяться контрольные погрешности в интервалы времени через 1 мин после захвата цели и через 3 мин после устойчивого сопровождения. Такая же точность должна достигаться через 1 и 3 мин после завершения маневра своего судна или сопровождаемой цели.
Подробно параметры контрольных операций и требуемые точности измерения параметров движения и элементов сближения определяются IМО. Указанные параметры приведены в табл. 14.1 и 14.2. За данные значения берутся погрешности, соответствующие лучшим результатам ручной прокладки в условиях качки ±10°.
Так, через 1 мин после начала автосопровождения определяется тенденция относительного перемещения цели, а погрешности в определении относительного курса цели могут достигать при некоторых ситуациях ±15°, относительной скорости – до ±2,8 узлов, в дистанции кратчайшего сближения – до ±2 миль (с вероятностью 95 %).
6. Требования IМО предусматривают применения в САРП звуковой и световой сигнализации, которая должна подаваться в следующих ситуациях:
при появлении опасной цели, по которой дистанция и время кратчайшего сближения меньше допустимых значений, определенных оператором для данного района плавания. Эти данные предварительно вводятся в ЦВМ оператором;
при пересечении целью охранного кольца, т.е. при приближении с целью на установленное судоводителем расстояние;
при сбросе цели с автосопровождения, вызванном любыми причинами, кроме выхода цели за шкалу дальности. Положение цели на момент сброса (потери) должно отчетливо обозначаться на экране.
Предупредительная звуковая и световая сигнализация привлекает внимание судоводителя к возникновению указанных ситуаций, что повышает надежность контроля обстановки. Цель, вызвавшая предупредительный сигнал, должна быть отчетливо обозначена на экране индикатора. Должна быть предусмотрена возможность включения и выключения сигнализации.
7. В требованиях IMO предусматривается возможность имитации («проигрывание») маневра на расхождения. Это позволяет судоводителю перед принятием решения о маневре предварительно оценить, как сложится ситуация при изменении собственного курса и (или) скорости. При этом обработка и отображение информации по сопровождаемым целям не прерываются. Имитация, как правило, начинаться нажатием специального переключателя с возвратной пружиной или функциональной (невозвратной) клавиши, обеспечивающей на экране индикатора обозначение режима имитации.
8. В САРП должна быть предусмотрена сигнализация о неисправностях режима автоматической прокладки, позволяющая судоводителю производить контроль за правильностью работы средства. Дополнительно должны быть предусмотрены тестовые программы для периодической полной проверки работы САРП путем сравнения с заданными характеристиками.
9. Устройство отображения может быть либо автономным, либо входить в состав РЛС. Однако оно должно включать все данные, которые обеспечиваются индикатором РЛС в соответствии с технико-эксплуатационными требованиями к судовым РЛС, принятым IМО.
Конструкция САРП должна быть такой, чтобы любая его неисправность не влияла на основное радиолокационное изображение.
10. Форма экранов РЛС/САРП должна быть круглой, что определяется словами «эффективный диаметр». Эффективный диаметр экрана, на котором отображается информация САРП, должен быть не менее 340 мм. В особенной степени требования сохранения эффективного диаметра экрана относятся к прямоугольным дисплеям РЛС/САРП, использование которых стало распространенным в связи с широким применением цифровой и телевизионной развертки. Необходимо помнить, что экраны с телевизионной разверткой, применяющиеся как устройства отображения информации, могут создавать дополнительные трудности оператору за счет, например, мерцания изображения.
11. В САРП должны предусматриваться, по крайней мере, следующие шкалы дальности: 3; 6 и 12 миль или 4;8 и 16 миль.
В САРП должна быть предусмотрена индикация выбранной шкалы дальности. Время восстановления всей информации после переключения шкал дальности и режимов работы САРП не должно превышать времени 4 оборотов антенны.
12. САРП должно допускать работу в режиме относительного движения при ориентации изображения < Север >, а также < Курс > или < Курс стаб.>. Кроме того, в САРП может быть предусмотрен режим истинного движения. В этом случае судоводитель должен иметь возможность выбора режимов истинного или относительного движения. При этом должна быть четкая индикация ориентации изображения и режима работы.
13. В САРП должна быть предусмотрена независимая регулировка яркости радиолокационного изображения и обработанной информации САРП, вплоть до полного исключения последней.
14. Должна быть предусмотрена возможность быстрого определения пеленга и дистанции до любого объекта, появляющегося на экране САРП.
|
|
Вопрос: Критерии выбора радиолокационных целей на автосопровождение.
|
Ответ:
В САРП существуют два способа захвата целей. В режиме автоматического захвата в процессор поступают данные в зоне поиска, устанавливаемой оператором на экране индикатора САРП, в результате чего цели в зоне поиска отбираются для автосопровождения без участия судоводителя.
В режиме ручного захвата производится ручной отбор целей для автосопровождения как в зоне поиска, так и вне ее.
Независимо от выбранного режима захвата (автоматического или ручного), автосопровождение целей будет продолжаться до тех пор, пока судоводитель не снимет цель с сопровождения или она не будет потеряна системой.
Хотя автоматический захват и снимает часть нагрузки с судоводителя, он может привести к избытку векторной информации на экране индикатора при большом количестве автосопровождаемых целей. В условиях интенсивного движения это затрудняет определение приоритетных параметров.
В режиме ручного захвата, несмотря на потерю времени, необходимого для захвата целей и сброса целей с сопровождения, будут отобраны именно те цели, которые действительно представляют интерес для судоводителя.
|
|
Вопрос: Анализ характерных аварий при неквалифицированном использовании САРП
|
Ответ:
Поэтому я посчитал нужным снова обратиться к анализу столкновения теплохода «Пётр Васёв» с пароходом «Адмирал Нахимов» в 1986 году как ярчайшей иллюстрацией упомянутой выше опасности чрезмерного доверия САРП. Думаю, именно это доверие к новой японской технике со стороны одного из ключевых виновников трагедии и послужило причиной гибели большого количества людей. Расскажу своими словами, без технических терминов и заумных формулировок, чтобы было понятно любому, а не только слушателям курса тренажера по САРП.
Как известно, капитан теплохода «Пётр Васёв» Ткаченко непрерывно вёл наблюдение за приближающимся «Адмиралом Нахимовых» с помощью САРП. Очевидно, что данные вычисления дистанции кратчайшего сближения с целью его вполне устраивали. Это первый фактор опасности: цифры вычисления САРП были приблизительными и могли содержать значительную погрешность.
Об этом капитан Ткаченко не думал или не знал и потому никак не реагировал на попытки вахтенного помощника Чудновского с «Адмирала Нахимова» докричаться по радио, требуя уступить ему дорогу, как было обещано ранее. Точно цифры никто не знает, но «Пётр Васёв» мог бы пройти по носу у «Адмирала Нахимова» в нескольких кабельтовых, как показало последующее расследование аварии.
Вообще-то такой способ расхождения судов в море не приветствуется, слишком опасен. На берегу, на автодорогах, мы говорим в таких случаях «подрезал», то есть влез под самым носом другой машины, вместо того, чтобы держаться на безопасном удалении. Так и Ткаченко, вероятно, хотел «подрезать» «Адмирала Нахимова».
Но «Адмирал Нахимов», которым в том момент управлял второй помощник Чудновский, ожидал, что его пропустят, как было обещано. А это значит совсем другое расхождение, чем проскакивание перед самым штевнем. То есть Чудновский имел все основания ожидать, что «Пётр Васёв» снизит скорость или отвернёт от курса, предположительно влево, под корму «Адмирала Нахимова», или как более сложный вариант, отвернёт вправо, чтобы описать циркуляцию и вернуться на прежний курс.
Предполагая такое вероятное маневрирование «Петра Васёва», Чудновский сделал большую ошибку: желая увеличить дистанцию между судами, он отвернул сначала на 5, а вскоре ещё на 10 градусов влево.
|
|
Вопрос: Возможные причины потери радиолокационных целей при автосопровождении.
|
Ответ:
Попытка захвата цели на близком расстоянии в условиях больших уровней помех (влияние дождя, морской поверхности) может приводить к выработке сигнала потери цели и соответствующего аларма.
|
|
Вопрос: Задержки изображения обрабатываемой автоматической информации при маневрах судна.
|
|
|
Вопрос: Использование САРП при различных обстоятельствах навигационной обстановки.
|
Ответ:
- определение место судна по пеленгам и дистанциям неподвижных объектов, получая мгновенно необходимые данные. Это позволяет вести непрерывный контроль места судна при плавании в узости,
- определение Dкр до неподвижных объектов (острова, мысы, буи, плавмаяки),
- определение скорости и направления течения. При ориентировании ИКО по норду в режиме ЛИД, на РИС у неподвижных объектов будут видны векторы (это и есть скорость и направление течения, если, конечно, курс и скорость судна вводятся без погрешностей),
- при отсутствии течения можно, наведя маркер на неподвижный объект, определить поправку к скорости своего судна и угол сноса, исходя из данных о векторе выбранного неподвижного объекта,
- вести обсервационное счисление, т.е. по навигационным параметрам на неподвижный объект (пелен, дистанция) рассчитываются автоматически обсервованные координаты места судна (jо,lо),
- позволяет непрерывно контролировать движение судна (с дискретностью в 1 минуту) относительно линии заданного пути, что практически избавляет судоводителя от ручной прокладки.
|
|
Вопрос: Закономерности разворота линий относительного движения при необходимых маневрах судна для расхождения с судами.
|
| |
 Скачать 126.22 Kb.
Скачать 126.22 Kb.