электромашины. ПЭР Мл-18. 1. 2 Техническое обслуживание и ремонт буксового узла электровоза вл80с
 Скачать 1.06 Mb. Скачать 1.06 Mb.
|

| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 11 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| промышленными роботами. Перспективы применения Как было сказано выше, робототехника становится все более и более дешевой и доступной, поскольку: Один робот заменяет несколько десятков человек. Он вырабатывает больше продукции. Окупает себя примерно за 12-15 лет. Развитие этой отрасли идет по пути разработки искусственного интеллекта. Наиболее перспективные отрасли развития робототехники в России – это: Строительство. Обрабатывающая промышленность. Горнодобывающая промышленность. Сельское хозяйство. Основные преимущества использования промышленных роботов Обрабатывающая промышленность. Горнодобывающая промышленность. Сельское хозяйство. Основные преимущества использования промышленных роботов Эти устройства уже доказали свою эффективность. Благодаря им: Снижаются затраты, в том числе и на рабочую силу. Повышается точность изготовления. Уменьшается количество брака. Ускоряются производственные процессы. Экономится материал и электроэнергия. Снижается стоимость обработки. На конце манипулятора (на его «запястье») располагается рабочий орган — устройство, предназначенное для выполнения специального задания. В качестве рабочего органа может выступать захватное устройство или технологический инструмент. Наиболее универсальной разновидностью захватного устройства | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 12 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| является схват — устройство, в котором захватывание и удержание объекта производятся посредством относительного перемещения частей данного устройства[. Как правило, схват по своей конструкции напоминает кисть человеческой руки: захват объекта осуществляется с помощью механических «пальцев». Для захвата плоских предметов используются захватные устройства с пневматической присоской. Применяют также крюки (для поднятия деталей с конвейеров), черпаки или совки (для жидких, сыпучих или гранулированных веществ). Для захвата же множества однотипных деталей применяют специализированные конструкции (например, магнитные захватные устройства. 1.4 Управление промышленных роботов Программное управление — самый простой тип системы управления, используется для управления роботами на промышленных объектах. В таких моделях отсутствует сенсорная часть, все действия жёстко фиксированы и регулярно повторяются. Для программирования могут применяться среды программирования типа VxWorks/Eclipse или языки программирования например Forth, Оберон, Компонентный Паскаль, Си. В качестве аппаратного обеспечения обычно используются промышленные компьютеры в мобильном исполнении PC/104 реже MicroPC. Адаптивное управление — роботы с адаптивной системой управления оснащены сенсорной частью. Сигналы, передаваемые датчиками, анализируются и в зависимости от результатов, принимается решение о дальнейших действиях, переходе к следующей стадии действий и т. д. Программирование основанное на методах искусственного интеллекта. Управление человеком (например, ручное дистанционное управление). Принципы управления промышленным роботом: Современные роботы функционируют на основе принципов обратной связи, подчинённого управления и иерархичности системы управления роботом. | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 13 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| Иерархия системы управления роботом подразумевает деление системы управления на горизонтальные слои, управляющие общим поведением робота, расчётом необходимой траектории движения манипулятора, поведением отдельных его приводов, и слои, непосредственно осуществляющие управление двигателями приводов. Подчинённое управление служит для построения системы управления приводом. Если необходимо построить систему управления приводом по положению (например, по углу поворота звена манипулятора), то cистема управления замыкается обратной связью по положению, а внутри системы управления по положению функционирует система управления по скорости со своей обратной связью по скорости, внутри которой существует контур управления по току со своей обратной связью. Современный робот оснащён не только обратными связями по положению, скорости и ускорениям звеньев. При захвате деталей робот должен знать, удачно ли он захватил деталь. Если деталь хрупкая или её поверхность имеет высокую степень чистоты, строятся сложные системы с обратной связью по усилию, позволяющие роботу схватывать деталь, не повреждая её поверхность и не разрушая её. Управление роботом может осуществляться как человеком-оператором, так и системой управления промышленным предприятием (ERP-системой), согласующими действия робота с готовностью заготовок и станков к выполнению технологических операций. .1.5 Захватные устройства промышленных роботов Захватным устройством ПР называется его рабочий орган, предназначенный для захватывания и удерживания предмета производства и (или) технологической оснастки, называемых объектом. ГОСТ 26063—84 устанавливает следующие типы захватных устройств ПР: механические, вакуумные, магнитные и прочие (рис. 1.1). Общим понятием для захватных устройств всех видов является понятие «рабочий элемент». Рабочим элементом называется элемент захватного устройства, вступающий непосредственно в контакт с объектом. Для магнитных захватных устройств всех видов является понятие «рабочий элемент». Рабочим элементом называется элемент захватного устройства,вступающий | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 14 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| непосредственно в контакт с объектом. Для магнитных захватных устройств рабочими элементами являются элементы магнитной системы, к которым притягивается объект, для вакуумных - контактирующая с объектом присоска, ограничивающая полость разряжения воздуха. Наряду с термином «рабочие элементы» в литературе употребляются антропоморфные термины: «губки», «пальцы», «челюсти» и др. Механическими называются захватные устройства, в которых удерживание объекта осуществляется под действием реакций в точках (зонах) контакта с рабочими элементами, создаваемых двигателем или собственным весом объекта. Механические захватные устройства разделяются на схваты и поддерживающие захватные устройства. Cхватом называется механическое захватное устройство, представляющее собой механизм, удерживающий объект посредством зажима рабочими элементами при их перемещении двигателем. Поддерживающими называются механические захватные устройства, не имеющие подвижных звеньев и представляющие собой опоры, на которых объект удерживается под действием сил тяжести (ковши для захватывания, транспортировки и разливки жидкого металла, крюки, штыри, призматические опорные элементы, лопатки и пр.). Вакуумными называются захватные устройства, удерживающие объект посредством разрежения воздуха в замкнутой полости рабочего элемента — присоски. Различают активные вакуумные захватные устройства, в которых разрежение воздуха создается принудительно с помощью вакуумных насосов или эжекционных устройств, и пассивные, - в которых разрежение воздуха создается за счет его вытеснения при деформировании рабочих элементов. Магнитными называются захватные устройства, удерживающие объект при действии магнитных сил, создаваемых постоянным магнитом или электромагнитом. По способу замены захватные устройства разделяются на заменяемые вручную и автоматически. Несменные захватные устройства, устанавливаемые с помощью неразъемных соединений, как правило, не используются. Узел крепления захватного устройства к руке манипулятора называется | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 15 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| механическим интерфейсом. С основанием захватного устройства связывается прямоугольная декартова система координат захватного устройства с началом, расположенным в условном геометрическом центре захватного устройства или удерживаемого объекта. В проекциях на оси этой системы координат задаются основные геометрические, точностные, статические и динамические силовые характеристики захватного устройства. Основными техническими характеристиками захватных устройств всех типов являются: номинальная грузоподъемность, усилие захватывания, предельно допустимые значения приложенных сил и моментов по осям системы координат захватного устройства, время захватывания и время отпускания, масса, габаритные размеры, показатели надежности. Усилие захватывания в стандартах не определяется; обычно говорят, что это сила воздействия рабочих элементов на объект. В схватах усилие захватывания создается приводом, перемещающим рабочие элементы при захватывании вплоть до зажима ими объекта. В пружинных схватах усилие захватывания обеспечивается пружинами, удерживающими объект в положении равновесия. Временем захватывания называется время от подачи сигнала 7 устройством управления на захватывание до момента завершения процесса, когда объект занимает устойчивое положение равновесия в схвате, а усилие захватывания достигает своего установившегося значения. Временем отпускания называется время от подачи устройством управления сигнала на отпускание до момента завершения процесса. Для схватов под завершением процесса отпускания понимается высвобождение объекта и полное раскрытие схвата. Номинальной грузоподъемностью захватного устройства называется наибольшее допустимое для данного захватного устройства значение массы захватываемых объектов. При оснащении таким захватным устройством ПР конкретной модели реальная масса удерживаемого объекта не должна превосходить полезной грузоподъемности ПР, т. е. того наибольшего значения массы объекта, при котором гарантируются его захватывание, удерживание и обеспечение установленных значений эксплуатационных | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 16 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| характеристик ПР. Предельно допустимыми значениями приложенных сил (моментов) называются наибольшие значения центрально приложенной к объекту (в начале системы координат захватного устройства) силы (момента), при которых объект удерживается захватным устройством. Приложенные силы (моменты) создаются действующими на объект силами тяжести, инерции, силами взаимодействия с другими предметами и оснасткой. К приложенным силам не относятся усилие захватывания и реакции в точках контакта объекта с рабочими элементами. Как правило, захватные устройства предназначены для работы с одним объектом и выполняют только функции захватывания, удерживания и отпускания. В то же время применяются многообъектные и многофункциональные захватныеустройства. Многообъектными называются захватные устройства, предназначенные для захватывания и удерживания двух и более объектов. Многофункциональными называются захватные устройства, предназначенные для выполнения наряду с основными функциями технологических операций и операций измерения. Определения различных видов захватных устройств приведены в работах [1, 2, 14, 27]. Основные параметры ЗУ регламентированы руководящим техни-ческим материалом РТМ2 РОО-1-78 и методическими указаниями МУ2.10-82, утвержденными Минстанкопромом 14.12.82 г. В качестве основных параметров приняты: - грузоподъемность, - размер захватываемой поверхности, - размер захватываемой поверхности, - конструкция и размеры мест крепления к роботу. Грузоподъемность ЗУ должна соответствовать одному из значений ряда: 0,08; 0,16; 0,63; 1,25; 2,50; 5,00; 10,00; 20.00; 40,00; 80,00; 160,00; 250,00; 500,00; 1000,00 кг. Этот ряд соответствует ряду грузоподъемности ПР, принятому в Минстанкопроме, и обусловлен тем, что грузоподъемность захватного устройства не должна являться фактором, ограничивающим технологические возможности ПР. Ряд грузоподъемности соответствует | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 17 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| ряду предпочтительных чисел R 10/3 ГОСТ 8032-84. Наибольший размер наружной или внутренней поверхности, захватываемой зажимными ЗУ, должен соответствовать одному из значений следующего ряда: 1, 4, 12, 32, 63, 100, 125, 160, 200, 250, 320, 400, 500 мм. Ряд наибольших размеров захватываемых поверхностей выбран из ряда чисел R 10 ГОСТ 6636-69 по конструктивным соображениям. Данный ряд регламентирует предел переналадки узкодиапазонных устройств и предел работы широкодиапазонных. Узкодиапазонные ЗУ при переналадке должны иметь возможность захватывать поверхности с размерами, включающими меньшие соседние значения указанного ряда. Широкодиапазонные ЗУ также должны обладать этой возможностью, но без переналадки. Таким образом, гамма ЗУ с наибольшими размерами захватываемых поверхностей, соответствующими ряду, обеспечивает захватывание поверхностей любого размера, лежащего внутри ряда, т.е., от 0 до 500 мм. Анализ существующих ЗУ показывает, что выполнение данного требования не приводит к усложнению конструкций ЗУ. 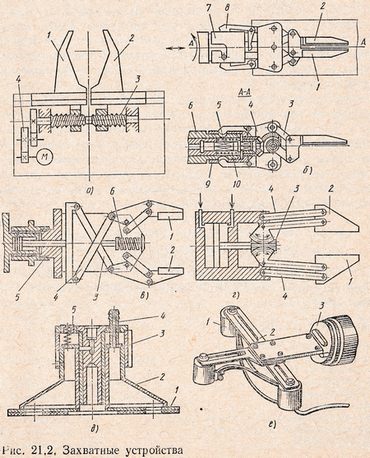 Рисунок 8 – Захватные устройства | ||||||||||||||||||
| | | | | | КП.1147.00.00.ПЗ | Лист | ||||||||||||
| | | | | | ||||||||||||||
| 18 | ||||||||||||||||||
| Изм. | Лист | № докум. | Подп | Дата | ||||||||||||||
| | ||||||||||||||||||