Содержание
Введение…………………………………………………………………………..5
1. Общая часть……………………………………………………………………
1.1 Назначение, устройство буксового узла электровоза ВЛ80С……………
1.2 Техническое обслуживание и ремонт буксового узла электровоза ВЛ80С ………………….…………………………………………………………
2. Охрана труда……………………………………………………………………
2.1 Требования техники безопасности при ремонте буксового транспорта электровоза ВЛ80С …………………………………………………………………
3. Список использованных источников………………………………………..
| |
|
|
|
|
|
ПЭР.1330.00.00.ПЗ
|
|
|
|
|
| |
Изм
|
Лист
|
№ докум
|
Подп
|
Дата
| |
Разраб
|
Жуков
|
|
|
Назначение, устройство, техническое обслуживание и ремонт буксового узла электровоза ВЛ80С
|
Лит
|
Лист
|
Листов
|
Пров
|
|
|
|
|
|
|
4
|
|
|
|
|
|
ОГАПОУ “СИТТ”
группа Мл-18
|
Н. контр
|
|
|
|
Утв.
|
|
|
| |
Введение
| |
|
|
|
|
|
Назначение, устройство, техническое обслуживание и ремонт буксового узла электровоза ВЛ80С
|
Лист
|
|
|
|
|
|
5
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
| |
|
|
|
|
|
Назначение, устройство, техническое обслуживание и ремонт буксового узла электровоза ВЛ80С
|
Лист
|
|
|
|
|
|
5
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
| |
|
|
|
|
|
Назначение, устройство, техническое обслуживание и ремонт тягового трансформатора электровоза ВЛ80С
|
Лист
|
|
|
|
|
|
6
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
| |
|
|
|
|
|
Назначение, устройство, техническое обслуживание и ремонт тягового трансформатора электровоза ВЛ80С
|
Лист
|
|
|
|
|
|
7
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
командного устройства движение в каждом сочленении (строго говоря, это — не роботы в полном смысле слова, а «полуроботы»).
Копирующие роботы (роботы с копирующим управлением) — манипуляторы, копирующие действия приводимого в движение оператором задающего устройства, кинематически подобного исполнительному механизму манипулятора (как и в предыдущем случае, такие манипуляторы можно считать «полуроботами»).
Полуавтоматические роботы— роботы, при управлении которыми человек-оператор задаёт лишь движение рабочего органа манипулятора, а формирование согласованных движений в сочленениях система управления роботов осуществляет самостоятельно.
Интерактивные роботы:
Автоматизированные роботы (роботы с автоматизированным управлением) — роботы, чередующие автоматические режимы управления с биотехническими.
Супервизорные роботы (роботы с супервизорным управлением) — роботы, выполняющие автоматически все этапы заданного цикла операций, но осуществляющие переход от одного этапа к другому по команде человека-оператора.
Диалоговые роботы (роботы с диалоговым управлением) — автоматические роботы (любой разновидности), способные взаимодействовать с человеком-оператором, используя язык того или иного уровня (включая подачу текстовых или голосовых команд и ответные сообщения робота).
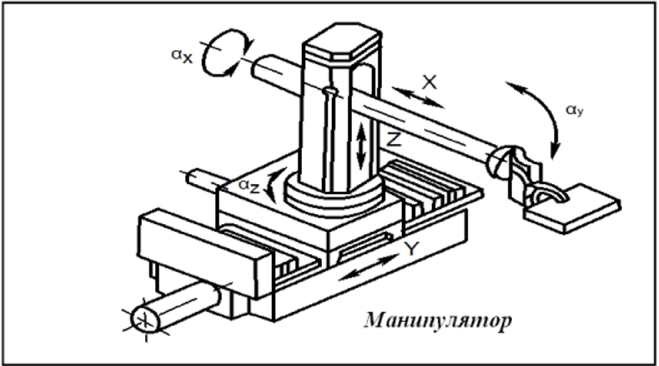
Рисунок 2 - Структура промышленного робота
| |
|
|
|
|
|
КП.1147.00.00.ПЗ
|
Лист
|
|
|
|
|
|
8
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
По грузоподъемности:
Легкие – до 10 кг.
Средние – 11-200 кг.
Тяжелые – 200 кг – 1 т.
Сверхтяжелые – более 1 т.
По маневренности:
Стационарные.
Подвижные.
По способу установки:
Встроенные.
Подвесные.
Напольные.
Типы промышленных роботов по назначению:
Универсальные, то есть выполняющие различные виды операций.

Рисунок 3 –Универсальные промышленные роботы
Специальные. Они работают даже в неблагоприятных условиях или имеют особые функции.

Рисунок 4 –Специальные промышленные роботы
| |
|
|
|
|
|
КП.1147.00.00.ПЗ
|
Лист
|
|
|
|
|
|
9
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
Специализированные. Такие роботы предназначены для осуществления какого-либо одного вида деятельности: сборка, резка, сварка, покраска, паллетирование и пр. Рассмотрим некоторые из них

Рисунок 5 –Специализированные промышленные роботы
Манипулятор — это управляемый механизм (или машина), который предназначен для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, и оснащён рабочим органом. В некоторых случаях в состав промышленного робота могут входить два (или большее число) манипуляторов
. . Традиционные. Это своеобразные робо-руки, работающие на сервоприводах. Движения ограничиваются размерами самой руки и инструмента, который закрепляется на ней. Они поворачиваются и совершают сложные движения по разнообразным траекториям. К ним относятся пневмоприсоски, захваты, распылители краски, роботы для 3D-печати, сварки.
Дельта-роботы. Совершают быстрые и точные движения, поэтому служат для выполнения фасовочных и монтажных работ в фармацевтике, электронной и пищевой промышленности.
Роботы типа SCARA. Их особенность: высокая точность и повторяемость, наряду с меньшей областью работы и степенью свободы.
Соответственно, используются в производствах, где важна
| |
|
|
|
|
|
КП.1147.00.00.ПЗ
|
Лист
|
|
|
|
|
|
10
|
Изм.
|
Лист
|
№ докум.
|
Подп
|
Дата
| |
точность, а не большая зона доступа (комплектация изделий и пр.).

Рисунок 6 - Роботы для обслуживания станков
Их основные функции – выемка деталей из станков с ЧПУ, загрузка материала, техническое обслуживание: замена инструментов, смазка. Могут обслуживать несколько станков.

Рисунок 7 - Коллаборативные роботы (коботы).
Работают вместе с людьми, и полностью безопасны для них. Легко настраиваются на разные виды работ, их можно быстро обучить выполнятьновые задачи. На данный момент считаются лучшими
| |
 Скачать 1.06 Mb.
Скачать 1.06 Mb.