1. что такое демонтаж и с помощью чего его выполняют
 Скачать 3.46 Mb. Скачать 3.46 Mb.
|

|
21.Как происходит осмотр КТП в какой промежуток составляет осмотр для механических цехов? Периодичность осмотров КТП устанавливается службой отдела Главного энергетика в зависимости от условий работы подстанции, интенсивности работы коммутационной аппаратуры распределительного щита, температуры окружающей среды, запыленности и т.п. Для механических цехов длительность промежутков между осмотрами 6 месяцев. Осмотр КТП производится при полностью снятом напряжении на вводе и отходящих линиях. При осмотрах проводят чистку от пыли и грязи всех устройств подстанции, проверяют болтовые соединения. При обнаружении обгораний контактные поверхности зачищают и восстанавливают антикоррозийное металлопокрытие. 22.Что проверяется при осмотре распределительных устройств? Осмотр электрооборудования распределительных устройств (РУ) следует проводить регулярно, в соответствии со сроками, указанные в таблице 4.1. При осмотре РУ проверяются: Исправность отопления и вентиляции; Исправность освещения в сети заземления; Наличие переносных заземлений, средств защиты и средств по оказанию первой медицинской помощи пострадавшим от несчастных случаев, а также противопожарных средств; Уровень и температура масла в маслонаполненных аппаратах, отсутствие течи масла; Состояние изоляции (запылённость, наличие трещин, следов разрядов, выпадение росы на поверхности изоляторов); Состояние контактов, нагрев контактных соединений; Целостность пломб счетчиков и реле; Состояние помещения (исправность дверей и окон, отсутсвие течи в кровлей междуэтажных перекрытиях,наличие и исправность замков) 23.Что такое электронные приводы и какие функции они выполняют? Электрический привод управляемая электромеханическая система, предназначенная для преобразования электрической энергии в механическую и обратно и управления этим процессом. Современный электропривод — совокупность множества электромашин, аппаратов и систем управления ими. Он является основным потребителем электрической энергии (до 60 %)и главным источником механической энергии в промышленности. электропривод определён как электромеханическая система, состоящая из преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения со внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса 24.Что такое програмированные контроллеры и какие преимущества они обеспечивают? Программируемый контроллер — специальная разновидность электронной вычислительной машины. Чаще всего ПЛК используют для автоматизации технологических процессов. В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека. Иногда на ПЛК строятся системы числового программного управления станков. ПЛК — устройства, предназначенные для работы в системах реального времени. ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности: • в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — ПЛК являются самостоятельным устройством, а не отдельной микросхемой. • в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы; • в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования. 25.Типы датчиков бывают(где применяются) Для начала давайте рассмотрим типы устройств с точки зрения характера регистрируемых ими воздействий. Здесь можно выделить две группы: контактные; бесконтактные. Первые подразумевают механическое воздействие. Характерным представителем такой группы являются конечные выключатели, приборы регистрирующие и измеряющие давление, скорость потока жидкостей и газов. Бесконтактные типы используют несколько принципов обнаружения события: магнитный, оптический, микроволновый, емкостной, индукционный, ультразвуковой. Каждый из них имеет особенности, определяющие область применения. Например, индукционные датчики не реагирует на предметы из немагнитных материалов. Кроме того, тип устройства определяет дальность действия (обнаружения). Оптические (оптико электронные), микроволновые, ультразвуковые способны работать на значительном удалении от объекта контроля. Остальные предназначены для использования на небольших расстояниях. Поскольку назначением любого преобразователя является не только обнаружение воздействия, но также его преобразование, то классификация датчиков по способу формирования выходного сигнала не менее важна, чем по обнаруживаемому параметру. Различают следующие типы выходов: пороговый; аналоговый; цифровой. Первый самый простой и характеризуется двумя состояниями "0", "1" – выключено, включено. В качестве элементов, формирующих такой сигнал выступают "сухие контакты" (реле) или электронные ключи (транзисторные, тиристорные, симисторные и пр.). Основным параметром такого выхода является коммутируемые ток и напряжение. Причем, обратите внимание, могут быть указаны максимальные и (или) номинальные значения. В первом случае имеется в ввиду непродолжительное время работы в указанном режиме, во втором – неограниченно. Достоинством таких устройств является универсальность – возможность работы практически во всех системах контроля и управления. Исключение могут составлять специализированные системы, "заточенные" под решение специфичных задач и использующие собственную линейку оборудования. Аналоговый датчик имеет на выходе сигнал, электрические характеристики которого (чаще напряжение) пропорционально зависят от контролируемого воздействия. В качестве примера можно привести некоторые виды термодатчиков. Для анализа и обработки такого сигнала требуются специальные схемотехнические решения. Плюсом такого исполнения является высокая информативность. Наверное многие знают что существует двоичный код, то есть последовательность логических уровней ("0" – низкий, "1" – высокий). Таким способом можно передавать информацию о состоянии устройства (значение измеряемого параметра), а также его уникальный адрес. Датчики, использующие такую технологию называются цифровыми. Подобный сигнал также требует дополнительной обработки, следовательно оборудование, работающее по такому принципу должно быть совместимо. Но в простых системах контроля и управления чаще используется первый способ. В завершение нужно заметить, что датчики, работающие в системах автоматики и управления могут иметь различную степень пыле-влаго защиты и рабочие температурные диапазоны. Конкретный тип и конструктивное исполнение устройства определяется в зависимости от решаемых задач и условий эксплуатации. Область применения различных видов датчиков. В зависимости от назначения, датчики позволяют обнаруживать наличие предмета в зоне своего действия, определять его положение, скорость и направление перемещения, геометрические размеры. Кстати, техническими характеристиками определяется минимальный размер контролируемого объекта, который может составлять от нескольких миллиметров до десятков сантиметров. Кроме того датчики используются для контроля температуры, состава, свойств и состояния окружающей среды. К примеру, датчики дыма в системах пожарной сигнализации позволяют обнаруживать пожар на начальных стадиях. Широко используются датчики уровня, причем как жидкостей, так и сыпучих материалов. Датчики различных типов широко применяются в: охранной и пожарной сигнализации; системах автоматики; телеметрии и управления. 26.Факторы которые следует учесть в работе катушки при перегреве. 1. Сгорание лака. Когда лак превращается в уголь - это сразу видно. Катушка часто горит снизу и практически не меняет цвет вверху. Без разборки поломку часто невозможно обнаружить. 2. Кипение лака. Прежде, чем сгореть, для чего нужна приличная температура, лак закипает и стекает с катушки на каркас, керн и другие окружающие катушку части. 3. Кристаллизация лака, изменение цвета анодированного каркаса. Прежде, чем начать кипеть, лак из пластичного состояния превращается в твердое и хрупкое. Катушка еще держится, все работает, но с увеличением нагрузки намотка банально слетает с каркаса. Такой лак легко обнаружить на каркасе и на намотке - он хрупок как стекло, а не пластичен. 27. Типовые регуляторы и регулировочные характеристики Для регулирования объектами управления, как правило, используют типовые регуляторы, названия которых соответствуют названиям типовых звеньев. 1. П – регулятор, пропорциональный регулятор Передаточная функция П-регулятора: Wп(s) = K1. Принцип действия заключается в том, что регулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка Е, тем больше управляющее воздействие Y). 2. И – регулятор, интегрирующий регулятор Передаточная функция И – регулятора: Wи(s) = K0/s. Управляющее воздействие на пропорционально интегралу от ошибки. 3. Д – регулятор, дифференцирующий регулятор Передаточная функция Д – регулятора: Wд(s) = K2*s. Д – регулятор генерирует управляющее воздействие только при изменении регулируемой величины: Y = K2*dE/dt. Могу комбинироваться в ПИ ПД ПИД 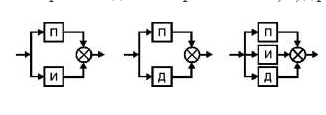 В зависимости от выбранного вида регулятор может иметь пропорциональную характеристику (П), пропорционально-интегральную характеристику (ПИ), пропорционально-дифференциальную характеристику (ПД) или пропорционально-интегральную (изодромную) характеристику с воздействием по производной (ПИД-регулятор). 1. пи-регулятор, пропорционально-интегральный регулятор пи-регулятор представляет собой сочетание п- и и-регуляторов. передаточная функция пи-регулятора: Wпи(s) = K1 + K0/s. 2. пд-регулятор, пропорционально-дифференциальный регулятор пд-регулятор представляет собой сочетание п- и д-регуляторов. передаточная функция пд-регулятора: Wпд(s) = K1 + K2 s. 3. пид-регулятор, пропорционально-интегрально-дифференциальный регулятор ПИД-регулятор представляет собой сочетание П-, И- и Д-регуляторов. Передаточная функция ПИД-регулятора: Wпид(s) = K1 + K0 / s + K2 s. Наиболее часто используется “пид”-регулятор, поскольку он сочетает в себе достоинства всех трех типовых регуляторов. 28. Структурные схемы непрерывных регуляторов. Непрерывный регулятор с аналоговым выходом, с импульсным выходом и с ШИМ выходом. 1. Структурная схема непрерывного регулятора с аналоговым выходом выход y регулятора ар (например, сигнал 0-20ма, 4-20ма, 0-5ма или 0-10в) воздействует через электропневматический преобразователь е/р сигналов (например, с выходным сигналом 20-100кпа) или электропневматический позиционный регулятор на исполнительный элемент к (регулирующий орган). 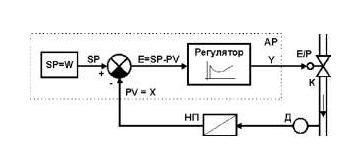 где: ар - непрерывный “пид”-регулятор с аналоговым выходом, sp - узел формирования заданной точки, pv=x- регулируемый технологический параметр, е - рассогласование регулятора, д - датчик, нп - нормирующий преобразователь (в современных регуляторах является входным устройством) y - выходной аналоговый управляющий сигнал е/р - электропневматический преобразователь, к - клапан регулирующий (регулирующий орган). 2. Структурная схема непрерывного регулятора с импульсным выходом Выходные управляющие сигналы регулятора - сигналы больше и меньше (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (п) воздействуют на исполнительный элемент к (регулирующий орган). 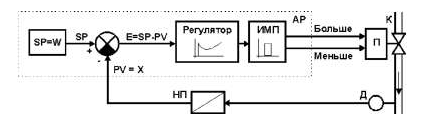 где: ар - непрерывный пид-регулятор с импульсным выходом, sp - узел формирования заданной точки, pv=x- регулируемый технологический параметр, е - рассогласование регулятора, д - датчик, нп - нормирующий преобразователь (в современных регуляторах является входным устройством) имп - импульсный шим модулятор, преобразующий выходной сигнал y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: q=\y\/100. сигналы больше и меньше - управляющие воздействия, п - пускатель контактный или бесконтактный, к - клапан регулирующий (регулирующий орган). 3. Структурная схема непрерывного регулятора с “шим” (широтно импульсным модулированным) выходом выходной управляющий сигнал регулятора (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (п) воздействуют на исполнительный элемент к (регулирующий орган). Непрерывные регуляторы с шим выходом широко применяются в системах регулирования температуры, где выходной управляющий симисторный элемент (или твердотельное реле, пускатель) воздействуют на термоэлектрический нагреватель тэн, или вентилятор. 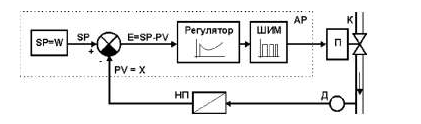 ар - непрерывный пид-регулятор с импульсным шим выходом, sp - узел формирования заданной точки, pv=x- регулируемый технологический параметр, е - рассогласование регулятора, д - датчик, нп - нормирующий преобразователь (в современных регуляторах является входным устройством) шим - импульсный шим модулятор, преобразующий выходной сигнал y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: q=y/100. п - пускатель контактный или бесконтактный, к - клапан регулирующий (регулирующий орган). 29.Реакция регулятора на единичное ступенчатое воздействие(п-,пи-.пд-,пид-) Параметрами являются коэффициент усиления Кр и рабочая точка Y0. Рабочая точка Y0 определяется как значение выходного сигнала, при котором рассогласование регулируемой величины равно нулю. При влиянии возмущающих воздействий возникает, в зависимости от Y0, отклонение регулмрования Пи-регулятор Благодаря интегральный составляющей, исключается отклонение регулирования Параметром интегральной составляющей является время интегрирования Ти. ПД-регулятор Пропорциональна составляющая накладывается на затухающую дифференциальную составляющую. Д-составляющая определяется через усиление упреждения Уд и время дифференцирования Тд ПИД-регулятор Пид регулятор достигает улучшения динамического качества регулирования 30.Дать определение класса точности. Класс точности — обобщённая характеристика средств измерений, определяемая пределами допускаемых основных и дополнительных погрешностей, а также рядом других свойств, влияющих на точность осуществляемых с их помощью измерений. 31. С какой регулярностью проводят проверки электросчетчиков? Проверка счётчиков электроэнергии — проверка счётчиков осуществляется не реже одного раза в год, но не чаще, чем раз в три месяца 32.Как проводиться проверка электроизмерительных приборов. При внешнем осмотре прибора должно быть установлено: отсутствие внешних повреждений и повреждений покрытия шкалы; четкость всех надписей по ГОСТ 8711—78 и ГОСТ 8476—78; укомплектованность прибора запасными частями, принадлежностями, необходимыми для проведения поверки. При опробовании должно быть установлено надежное закрепление зажимов приборов, плавный ход и четкая фиксация переключателей. Электрическую прочность и сопротивление изоляции проверяют по ГОСТ 8711-78 для амперметров и вольтметров и по гост 8476—78 - для ваттметров и варметров. Электрическое сопротивление изоляции не должно превышать значения, установленного в гост 8711—78 для амперметров и Вольтметров ив ГОСТ 8476-78 - для ваттметров и варметров. допускается электрическую прочность изоляции проверять на постоянном токе, если это предусмотрено в нормативно-технической документации (нтд) на приборы конкретных типов. |