все. 1 Дайте определение электропривода. Электропривод
 Скачать 3.1 Mb. Скачать 3.1 Mb.
|

|
51 Дайте пояснение характера изменения механической характеристики АД при реостатном способе регулирования. Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9]. Первый вариант: включение добавочного резистора в цепь статора.  Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:  Критическое скольжение уменьшается:  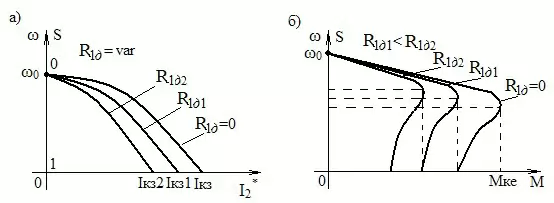 Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора Электромеханические характеристики (рис. 5.5, а) выходят из одной точки . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д. Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе. Второй вариант: включение добавочного резистора в цепь ротора. Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6. При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери. 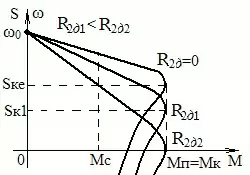 Рис. 5.6. Механические характеристики АД при введении добавочного сопротивления в цепь ротора 52 Приведите схему, реализующую реостатное регулирование скорости АД. Введение резисторов в цепь ротора (реостатное регулирование) позволяет, как и для двигателей постоянного тока, регулировать угловую скорость двигателя. Регулирование осуществляется вниз от основной угловой скорости. Плавность регулирования зависит от числа ступеней включаемых резисторов. 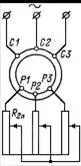 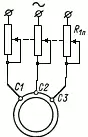 Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора, как это показано на рис. 6.1 Рисунок 6.1–Схемы включения резисторов в цепь ротора а) и статора б) 53 Приведите схему реализующую регулирование скорости АД изменением сопротивления в цепи ротора. 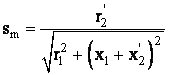 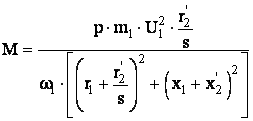 Согласно выражениям при увеличении активного сопротивления вторичной цепи увеличивается критическое скольжение, и механическая характеристика становится более мягкой (см. рис. 6.2).  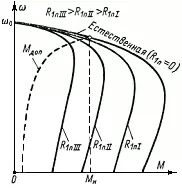 Механические характеристики асинхронного двигателя при регулировании скорости изменением сопротивления в цепи ротора а) и статора б) 54. Дайте пояснение характера изменения механической характеристики АД при изменении сопротивления в це пи ротора. При включении в цепь ротора добавочного сопротивлений повышается критическое скольжение 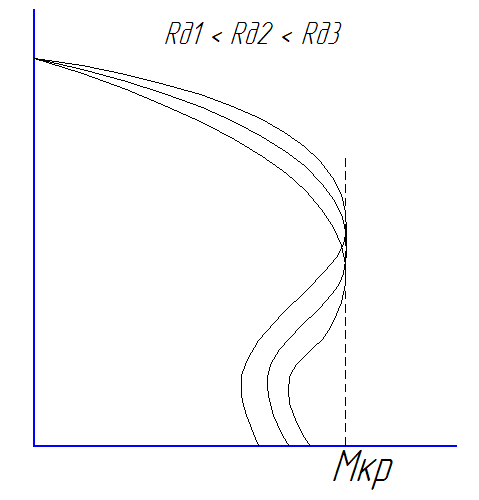    Величина критического момента при данном регулировании остается постоянным. 55. Приведите достоинства и недостатки частотного способа регулирования скорости АД. Достоинства частотного способа регулирования следующие:
Недостатками частотного регулирования:
56 Чем определяется допустимая температура нагрева электрической машины. Наибольшая допустимая температура электродвигателя ограничивается термической стойкостью его изоляции, которая является самым ответственным элементом машины, определяющим срок службы электродвигателя с максимальным использованием его мощности. 57 Приведите уравнение теплового баланса электрического двигателя с пояснением постоянных составляющих. Уравнение теплового баланса электрического двигателя:  Где: Q – количество теплоты (мощность потерь в ЭД) выделяемая ЭД в единицу времени  А –теплоотдача ЭД ( количество теплоты отдаваемая электродвигателем в окружающую среду в единицу времени при изменении температуры на 1 градус   - превышение температуры ЭД над температурой окружающей среды - превышение температуры ЭД над температурой окружающей средыС – теплоемкость ЭД (количество теплоты необходимое для повышения температуры ЭД на 1 0С 58 Особенности применения метода трех касательных для определения постоянной нагрева. 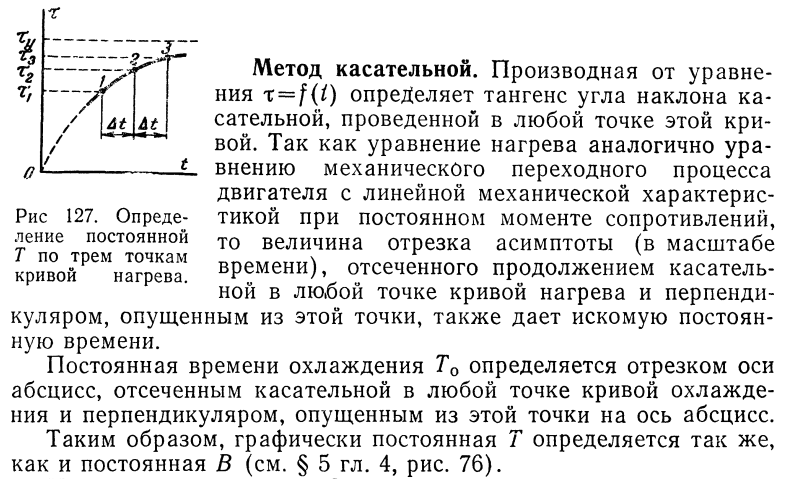 59 Приведите уравнение нагрева ДПТ при to=0.   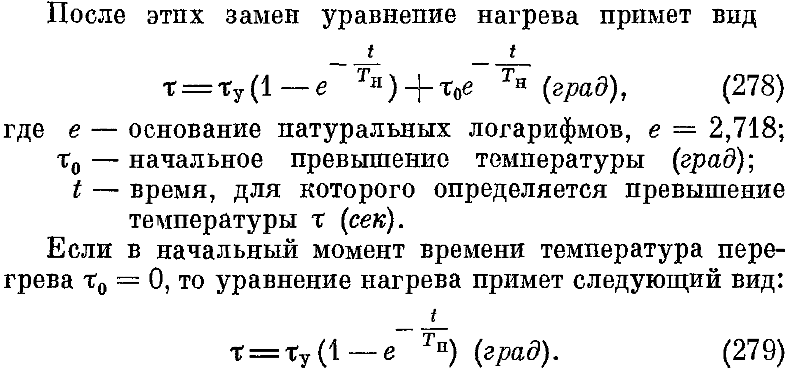 60 Приведите уравнение охлаждения АД с пояснением входящих в него постоянных. Охдаждение происходит при отключении двигателя от сети. Теплота продолжает выделяться в окружающую среду до разницы температур в 0 и описывается уравнением C dV + A V dt = 0 где Ао - теплоотдача неподвижного двигателя, То - постоянная времени охлаждения, То = (1,2...2) Ттепл То = 0,37 Vуст По времени охлаждения до температуры окружающей среды tо = (3...5) To. 64 Достоинства и недостатки управления скоростью АД изменением числа пар полю сов. Общие достоинства способа регулирования скорости АД изменением числа пар полюсов: - простота реализации; - высокая жесткость механических характеристик и отсутствие больших потерь скольжения; При высокой жесткости механической характеристики изменение момента нагрузки не приводит к существенному изменению угловой скорости, что важно для ряда механизмов. Общие недостатки: - регулирование скорости ступенчатое, так как число пар полюсов может быть только целым числом. То есть в заданном диапазоне регулирования реализуется ограниченное число скоростей: для однообмоточных двигателей – обычно две; для двухобмоточных двигателей, как правило, четыре. - такой способ регулирования скорости малопригоден для автоматизации. - обмотка с переключением числа полюсов создает МДС с большей величиной высших гармоник поля, чем нормальная трехфазная обмотка. Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными 65 Приведите с пояснением характер изменения мех-ой хар-ки АД при переключении числа пар полюсов. Рассмотрим принцип получения различного числа пар полюсов при переключении частей обмотки статора на следующем упрощенном примере. На рис. 1 показана схема одной фазы статорной обмотки, которая состоит из двух одинаковых частей 1н—1к, 2н—2к, имеющих два проводника. Если секции соединены так, как это показано на рис. 1а, и к обмотке статора подведен ток I, имеющий в данный момент времени направление, показанное стрелками, то образуется магнитное поле с четырьмя полюсами, т. е. p = 2 (направление магнитных силовых линий определяем с помощью правила буравчика). Оставив направление тока тем же, изменим несколько схему соединения обмотки, подключив конец первой секции 1к к концу второй 2к (рис. 1б). Из рис. 1б следует, что в этом случае статорная обмотка образует магнитное поле с числом пар полюсов, вдвое меньшим по сравнению с полем рис. 1а. 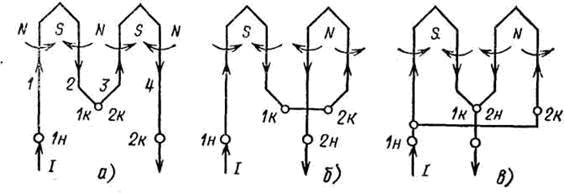 Рассмотрим схемы соединения статора 'и мех-е характеристики АД для этих случаев. Треугольник — двойная звезда. Для получения большего числа пар полюсов р^ секции каждой фазы статора включены в треугольник согласно, т. е. так, как это показано на рис. 2а, где А1н и A2н — начала соответственно первой и второй секций фазы A; А1к и A2к — их концы. Обозначения для выводов секций фаз В и С, схемы включения которых аналогичны схемам фазы A, опущены. Соединение секций по схеме рис.2 б, как отмечалось выше, вызовет уменьшение в 2 раза числа пар полюсов АД. Схема рис. 2б, получила название двойной звезды. Для получения общего вида механических характеристик определим допустимую мощность АД при включении его статора по схемам рис. 2, а и б. Учитывая, что допустимый ток в секции обмотки статора I1доп = I1ном остается неизменным при переключении числа пар полюсов, допустимую первичную мощность определим: для схемы треугольник (рис. 2, а)  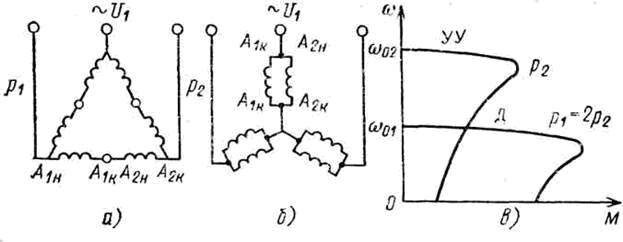 Рис. 2. Соед-ие обмоток статора в треугольник (а), двойную звезду (б) и мех-ие хар-ки при схемах треугольник — двойная звезда (Д—УУ) (в) Из получ-ых выражений следует, что при cos φ1д ≈ cos φ1уу допустимая мощность АД остается практически неизменной. Поэтому при увел-ии вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу АД увеличивается примерно в 2 раза. 66 В чем идея импульсивного регулирования скорости электрической машины. Для маломощных электродвигателей и при необходимости получить очень малые скорости вращения, можно с успехом применить схему на ИМС (рис.3). Она рассчитана на питание 12В постоянного тока. В случае более высокого напряжения следует запитать микросхему через параметрический стабилизатор с напряжением стабилизации не выше 15В. Регулировка скорости осуществляется путем изменения среднего значения напряжения импульсов, подаваемых на электродвигатель. Такие импульсы эффективно регулируют очень малые скорости вращения, как бы непрерывно "подталкивая" ротор электродвигателя. При высоких скоростях вращения электродвигатель работает обычным образом. 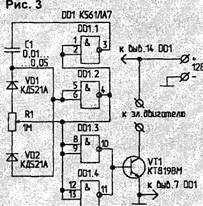 Импульсное регулирование скорости производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора Ксопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей. При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности. 67 Приведите пример схем импульсивного управления МПТ НВ. Принципиальные схемы импульсного регулирования показаны на рисунке  Если к валу двигателя приложен статический момент нагрузки, приводящий к механическому торможению двигателя во время паузы,то возможно применение схемы (рис.5.28,а), в которой ключ К в течение одной части цикла подключает якорь непосредственно к источнику питания, создавая положительный момент (разгон), в течение же другой части отключает якорь от источника питания (торможение). Если двигатель работает без или с малой статической нагрузкой, то возможно применение электрического торможения (динамического или противовключением) во время паузы. Например, в схеме на рис. 5.28, б ключ К переключает во время паузы якорь на сопротивление Rд для осуществления динамического торможения. 68 Приведите пример мех-ой хар-ки ДПТ НВ при импульсном управлении изменением про должительности включения сопротивления в главной цепи. Импульсный метод регулирование осуществляется изменением U, Ф/R резистора в цепи якоря; R – периодически замыкают/размыкают ключ 1 1 замыкают, γ=1, → естественная характеристика 2; 1 размыкают, γ=0, → искусственная характеристика 3; 0<γ<1 → механические характеристики располагаются между 2 и 3(4)   Ф – при γ=1 ключ замкнут, по ОВ течет Iн, → естественная характеристика; при γ=0 ключ разомкнут, Iв и Ф↓, → искусственная характеристика; 0<γ<1 → промежуточные характеристики.   Uя – якорь периодически включается к источнику Uс; ключ замкнут →Iя под действием Uc, разомкнут → Iс под действием ЭДС самоиндукции.   || - режим прерывного I - для прямолинейных участков. 69 Приведите механической характеристики АД при импульсном управлении изменением продолжительности включения сопротивления в цепи статора. Схема импульсного регулирования скорости вращения асинхронного двигателя 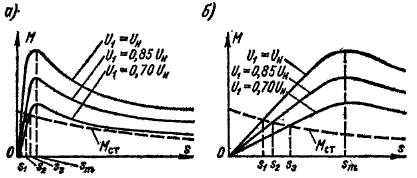 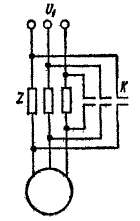 Импульсное регулирование скорости производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей. При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности |