все. 1 Дайте определение электропривода. Электропривод
 Скачать 3.1 Mb. Скачать 3.1 Mb.
|

                       1 Дайте определение электропривода. 1 Дайте определение электропривода.Электропривод – это электромеханическая система, состоящая из устройства преобразования (ПрУ), эл. Машины (ЭМ), передаточного устройства (ПУ), устройства управления и защиты (УУ) и рабочих органов технологической машины (РОТМ). Источником энергии эл.привода является электрическая сеть. Электрический привод (сокращённо — электропривод) — это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Электропривод – это электромеханическая система, состоящая, в общем случае, из взаимодействующих преобразователей электроэнергии, электромеханических и механических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесс. 2 Дайте определение электропривода в виде структурной схемы. 1) Взаимная связь элементов, входящих в состав электропривода в общем виде представлена на рис. 1.1 в виде структурной схемы. 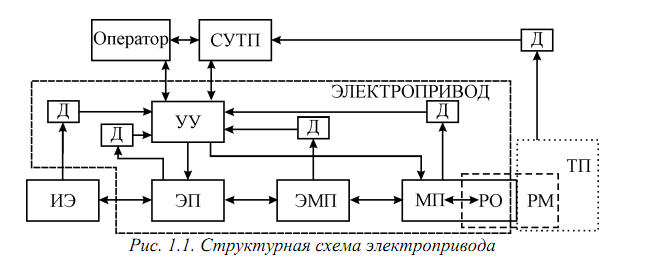 ИЭ – источник энергии, ЭП – эл.преобразователь, ЭМП – электромех-ий преобраз-ль, МП –мех-ий преобраз-ль, РО – рабочий орган, РМ – рабочий механизм, СУТП – система управления технолог-им процессом, УУ – управляющее устройство, Д- датчики, ТП – технолог-ий процесс. 2) Источником энергии эл.привода является электрическая сеть. Эл.сеть ПрУ ЭМ ПУ РОТМ УУ ПрУ – устойство, кот. согласует напр.сети и эл.машины ПУ – механич.система,кот. Согласует параметры эл.машины с технол.машины 3)  1-электрическая сеть, 2-преобразовательное устройство(тр-р, преобраз.), 3-ЭД. 4-передаточное устройство(редуктор), 5-рабочий орган, 6-устройство управления. ИЛИ Основным элементом любого электропривода 6 служит электрический двигатель 1, который вырабатывает механическую энергию (МЭ) за счет потребляемой электрической энергии, т.е. является электромеханическим преобразователем энергии. От электродвигателя механическая энергия через передаточное устройство 9 (механическое, гидравлическое, электромагнитное) подается на исполнительный орган 7 рабочей машины 8, за счет чего тот совершает требуемое механическое движение. Функция передаточного устройства заключается в согласовании параметров движения электродвигателя и исполнительного органа 3 Дайте определение группового электропривода. 1) Групповым электроприводом называется такой привод, в котором от одного электродвигателя с помощью одной или нескольких трансмиссий движение передается группе рабочих машин. 2) Кинематическая цепь в таком приводе сложна и громоздка, а сам электропривод является неэкономичным, усложняется его эксплуатация и автоматизация технологических процессов. Вследствие этого трансмиссионный электропривод в настоящее время почти не применяется, он уступил место индивидуальному и взаимосвязанному. Групповой электропривод состоит из одного электрического двигателя, который через трансмиссию и контрпривод приводит в движение несколько исполнительных механизмов. Контрпривод представляет собой короткий вал, лежащий в подшипниках. На валу расположены ступенчатый шкив, рабочий (связанный с валом) и холостой (свободно сидящий на валу) шкивы. Контрпривод дает возможность изменять скорость вращения станка (при помощи ступенчатого шкива), останавливать и пускать станок (при помощи рабочего или холостого шкива). Остановка приводного двигателя приводит к прекращению работы всех исполнительных механизмов, получающих от него механическую энергию. При работе только части исполнительных механизмов групповой привод имеет низкий КПД. Эл. Сеть ПрУ УУ ЭМ ПУ1 ПУ2 … ПУn РОТМ1 РОТМ2 … РОТМn 4 Дайте определение индивидуального электропривода. ИНДИВИДУАЛЬНЫЙ ЭЛЕКТРОПРИВОД -электропривод, к-рый обеспечивает движение только-одного механизма (напр., вращение шпинделя станка) в отличие от группового электропривода, в к-ром один электродвигатель приводит в движение одновременно неск. механизмов. Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как при индивидуальном электроприводе упрощается кинематическая передача (в некоторых случаях она полностью исключена) от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины. Индивидуальный электропривод широко применяется в различных современных машинах, например: в сложных металлорежущих станках, прокатных станах металлургического производства, подъемно-транспортных машинах, роботах-манипуляторах и т.п. Эл. Сеть ЭМ1 ЭМ2 … ЭМn ПУ1 ПУ2 … ПУn РОТМ1 РОТМ2 … РОТМn 5 Дайте определение взаимосвязанного электропривода. - Когда несколько эл. и мех. связанных эл.машин работают на один рабочий орган технологической машины - Взаимосвязанным электроприводом называется два или несколько электрически связанных между собой электропривода, при работе которых поддерживается заданное соотношение их скоростей и (или) нагрузок, и (или) положения исполнительных органов рабочих машин. - Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой индивидуальных электроприводов, при работе которых поддерживается заданное соотношение или равенство скоростей, или нагрузок, или положение исполнительных органов рабочих машин. Необходимость в таком приводе возникает по конструктивным или технологическим соображениям. Примером многодвигательного взаимосвязанного электропривода с механическим валом может служить привод длинного ленточного или цепного конвейера, привод платформы механизма поворота мощного экскаватора, привод общей шестерни мощного винтового пресса. 6 Дайте определение рационального электропривода. Рациональным электроприводом называется такой электропривод, в котором осуществляется или производится рациональные сочетании свойств или характеристик электропривода с характеристиками технологического процесса или технологической машины. Необходимые сведения для создания рационального электропривода находят приводных характеристиках рабочей машины. Приводным характеристикам рабочей машины относят: 1)технологическая, 2)кинематическая, 3)энергетическая, 4)механическая, 5)нагрузочная, 6)инерционная 7 Перечислите особенности применения электропривода в промышленном производстве. Многодвигательный электропривод, обеспечивающий автоматическое выполнение технологических операций и согласование отдельных движений, получил большое распространение в станкостроении. Вследствие сокращения вспомогательных операций, более точного и плавного регулирования скорости существенно повысилась производительность станков, облегчился труд рабочих, улучшилось качество изделий. Существенные преимущества многодвигательного привода стимулировали его использование в горных, металлургических, текстильных, полиграфических и многих других машинах. В с/x производстве применяются те же машины, что и в народном хозяйстве: центрифуги, вентиляторы, насосы, машины кривошипно-шатунными механизмами, машины изготовления и сортировки кормов. Однако применение имеют свою специфику, специфика заключается в сложной окружающей среде рабочего механизма. 1)большая влажность (вечером достигает до 100%); 2)механизмы работают кратковременно, изоляция не успевает высушиться; 3)источник электроэнергии(трансформаторы)имеют ограниченную мощность с мощностями электрических машин не соизмеримы Области применения приводов с однофазным питанием - насосы для перекачки воды, центрифуги, системы ирригации. 8 На основании какого закона осуществляется приведение моментов сопротивления в электрическом приводе? Приведенный момент сопротивления находится на основе закона сохранения энергии или энергетического баланса.    - коэф. передачи - коэф. передачи  9 На основании какого закона осуществляется приведение сил сопротивления в элек трическом приводе? Момент сопротивления механизма Мс, возникающий на валу рабочей машины РО, передаётся на вал приводного электродвигателя как момент М'c посредством элементов трансмиссии с передаточным отношением i и коэффициентом полезного действия hп. Принцип приведения моментов заключается в сохранении равенства мощностей на приводном валу рабочего органа и электрической машины:  откуда  , (2.2) , (2.2)При наличии нескольких передач между двигателем и механизмом с передаточными числами i1, i2 ... in и соответствующими кпд h1, h2 … hm момент сопротивления, приведенный к скорости вала двигателя, определяется формулой:  , (2.3) , (2.3)Приведение сил сопротивления производится аналогично приведению моментов. Если скорость поступательного движения V, м/c, а угловая скорость вала двигателя wд, рад/с, то  , (2.4) , (2.4)где Fсм – сила сопротивления производственного механизма, Н. 10 На основе какого предположения осуществляется приведение моментов инерции в электрическом приводе? Практически мех-ая хар-ка любого производств-го мех-ма м.б. описана:  Мс – момент сопр-ия производ-го механизма при угловой скорости вращения  ; ;Мсо – приведенный момент при пуске; Мсн – приведенный момент сопротивления при номин-ой нагрузке (при ном-ой скорости  ); );α – показатель степени, хар-щийся изменением момента сопр-ия при изменении скорости ; – номинальная скорость.11 Приведите эмпирическую формулу, описывающую механическую характеристику механизма промышленного назначения работающего с электроприводом. Различные производственные механизмы обладают механическими характеристиками, кот. можно описать следующей эмпирич-ой формулой: Мс – момент сопр-ия производ-го механизма при угловой скорости вращения ;Мсо – приведенный момент при пуске; Мсн – приведенный момент сопротивления при номин-ой нагрузке (при ном-ой скорости );α – показатель степени, хар-щийся изменением момента сопр-ия при изменении скорости ; – номинальная скорость.12 Перечислите категории мех-их хар-ик механизмов промышленного назначения с электроприводом.  В зависимости от величины жесткости, мех-ие хар-ки ЭД делят на:
13 Приведите формулу, описывающую мех-ую характеристику подъемного крана. Практически мех-ая хар-ка любого производств-го мех-ма м.б. описана: Мс – момент сопр-ия производ-го механизма при угловой скорости вращения ;Мсо – приведенный момент при пуске; Мсн – приведенный момент сопротивления при номин-ой нагрузке (при ном-ой скорости );α – показатель степени, хар-щийся изменением момента сопр-ия при изменении скорости ; – номинальная скорость.Для подъемных механизмов α =0; Мс = Мсн. 14 Приведите формулу, описывающую мех-ую характеристику вентилятора. Практически мех-ая хар-ка любого производств-го мех-ма м.б. описана: Мс – момент сопр-ия производ-го механизма при угловой скорости вращения ;Мсо – приведенный момент при пуске; Мсн – приведенный момент сопротивления при номин-ой нагрузке (при ном-ой скорости );α – показатель степени, хар-щийся изменением момента сопр-ия при изменении скорости ; – номинальная скорость.Для вентиляторов α =2. 15 Приведите формулу, описывающую мех-ую хар-ку токарного стан ка. Практически мех-ая хар-ка любого производств-го мех-ма м.б. описана: Мс – момент сопр-ия производ-го механизма при угловой скорости вращения ;Мсо – приведенный момент при пуске; Мсн – приведенный момент сопротивления при номин-ой нагрузке (при ном-ой скорости );α – показатель степени, хар-щийся изменением момента сопр-ия при изменении скорости ; – номинальная скорость.Для токарных станков α = -1. 16 Дайте определение жесткости механической характеристики. Все механические характеристики имеют падающую характеристику Жесткость мех. характеристики ЭМ в приводе – β  β= ∞ - абсолютно жесткая мех. характеристика β= 40÷10 –жесткая мех. характеристика β<10 – мягкая мех. характеристика |