все. 1 Дайте определение электропривода. Электропривод
 Скачать 3.1 Mb. Скачать 3.1 Mb.
|

|
31 Как по формуле Клосса построить механические характеристики АД? На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов  к к  и номинальное скольжение и номинальное скольжение  (при отсутствии величин сопротивлений). (при отсутствии величин сопротивлений).Для расчета кривой  формулу Клосса используют в следующем порядке: формулу Клосса используют в следующем порядке:
В области малых скольжений слагаемые  и и  значительно меньше значительно меньше  и ими можно пренебречь. Тогда участки кривых и и ими можно пренебречь. Тогда участки кривых и  при малых скольжениях будут практически прямолинейными: при малых скольжениях будут практически прямолинейными:  . . На рис. 3.4 построены рабочие участки (от холостого хода до номинальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:  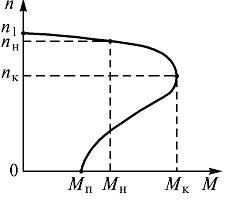 . 32 Как по каталожным данным АД определить sкр? Номинальный момент на валу двигателя  Критический момент Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м. Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.  кратность максимального момента kм (перегрузочная способность) 33 Перечислите известные Вам тормозные режимы электрических машин. Торможение электропривода посредством переключения обмоток фаз (торможение противовключением) применяют, когда необх-о быстро остановить машину. В ДПТ меняют подключение концов обмоток якоря. В обоих случаях действующее напряжение становится большим, поэтому для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря или ротора.Энергия торможения и поступающая из сети рассеивается в обмотках якоря и в резисторах. Динамическое торможение характеризуется тем, что электрическая машина работает генератором (динамо). Для динамического торможения якорь двигателя постоянного тока отключают от источника питания и включают на сопротивление, а обмотка возбуждения остается под напряжением, асинхронных двигателях динамическое торможение достигается подачей постоянного тока в обмотку статора двигателя. В режиме рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большей ωо. В этом случае ток изменяет направление, электрическая машина становится генератором, работающим параллельно с сетью, энергия торможения за вычетом потерь отдается в электрическую сеть. 34 Какая эл.маш. и в коком режиме работает в точке «А»? В первом рисунке дпт последовательного возбуждения  асинхронного двигателя асинхронного двигателя35 Какая эл.маши. работает в режиме рекуперативного торможения, ка кие при этом осуществляется преобразования энергии? У двигателей независимого и параллельного возбуждения 3 режима торможения включая генераторный( рекуперативный)  Если скорость двигателя оказывается выше скорости идеального холостого хода Если скорость двигателя оказывается выше скорости идеального холостого хода  то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения становится отрицательным. Следовательно, меняется и знак момента – он становится тормозным. Машина работает в генераторном режиме: механическая энергия, поступающая со стороны вала машины, преобразуется в электрическую и отдается в сеть. Характеристики генераторного режима с отдачей (рекуперацией) энергии являются продолжением характеристик двигательного режима и располагаются во II квадрате. Генераторный режим торможения используется, например, в приводах транспортных и подъемных механизмов при спуске грузов. Способ весьма экономичен, т.к. энергия отдается в сеть. 36 Электрическая машина работает в режиме динамического торможения. Какие при этом осуществляются преобразования энергии? L M I E R я д д + - Рис. 2.23 М Машина в этом случае работает в режиме генератора. Механическая энергия, поступающая со стороны вала, преобразуется в электрическую и выделяется в виде тепла в сопротивлениях цепи якоря. Следовательно, режим не экономичен. Уравнение механической характеристики несложно получить из приняв  : : . Откуда для тормозного момента двигателя получим . Откуда для тормозного момента двигателя получим . .Из этого соотношения следует: во-первых, момент становится тормозящим (отрицательным); во–вторых, момент возрастает с увеличением скорости  ; в третьих, тормозной момент при отрицательном значении ; в третьих, тормозной момент при отрицательном значении  тем больше, чем меньше тем больше, чем меньше  37 Приведите мех-ие хар-ки машины постоянного тока последовательного возбуждения, рабо тающей в режиме динамического торможения с самовозбуждением.  . Характеристики динамического торможения с Самовозбуждением 38 Нарисуйте схему, обеспечивающую динамическое торможение асинхронной машины Динамическое торможение. Этот способ осущ-ся путем отключения статора от сети переменного тока и включения обмотки статора на сеть постоянного тока (рис. 3.34). В двигательном режиме замкнуты контакты К1 и разомкнуты контакты К2. В тормозном режиме контакты К1 разомкнуты, а К2 замкнуты. В результате МДС статора создает неподвижное магнитное поле. Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств.  39 Нарисуйте схему динамического торможения МПТ последо вательного возбуждения с самовозбуждением.  Рис. 10.65. Схемы машины с после довательным возбуждением в ре жимах двигательном (а) и дина мического торможения (б) 40 Приведите схему динамического торможения МПТ парал лельного возбуждения .  Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т  41 Приведите вид мех-ой ха-ки торможения противовключением МПТ последовательного возбуждения «набросом» нагрузки.  Рисунок 1.2-Механические характеристики двигателя постоянного тока последовательного возбуждения при торможении противовключением 42 Приведите вид мех-ой хар-ки асинхронной машины, работающей в режиме динамического торможения. Взаимодействие магнитного поля статора с током ротора создает на валу двигателя тормозной момент. Механические тормозные характеристики показаны рис. 3.35. В этом случае ротор тормозится до полной остановки без дополнительных устройств. 43 Как определяется диапазон регулирования скорости вращения электропривода Диапазон регулирования – это отношение возможных установившихся скоростей D=wmax/wmin. На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости. 44 От чего зависит стабильность угловой скорости электропривода? Стабильность угловой скорости – характеризуется изменением угловой скорости при заданном отключении момента нагрузки и зависит от жесткости механической характеристики. Она тем выше, чем больше жесткость характеристики. 45 Перечислите способы регулирования скорости ДПТ независимого возбуждения. 1) регулирование за счет изменения величины сопротивления реостата в цепи якоря, 2) регулирование за счет изменения потока возбуждения двигателя Ф, 3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.  1) Рассмотрим первый способ регулирования Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения  Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б) Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3. По этой причине диапазон регулирования скорости ограничен (D= 2 - З). Недостатком является наличие значительных потерь мощности при регулировании, Достоинством простота и надежность схемы управления. 2) При втором способе рег-ие осущ-ся изм-ем величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя. Диапазон регулирования скорости для данного способа D = 2 - 4. Меха-ие хар-ики для различных значений потока дв-ля приведены на рис. 2, а и 2, б, из которых видно, что хар-ки в пределах номинального тока имеют высокую степень жесткости. Обмотки возбуждения ДПТ независимого возбуждения обладают значит-ой индуктивностью. В связи с этим рег-ие угловой скорости будет осуществляться плавно. Преимуществами являются его простота и высокая экономичность. 3) Третий способ рег-ия скорости закл-ся в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные хар-ки являются жесткими, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Диапазон рег-ия равен 10 и может быть расширен за счет специальных схем управления. При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя. Преимущества данный способ рег-ия явл-ся экономичным, так-так регул-ие угловой скорости двигателя осущ-ся без дополнительных потерь мощности в силовой цепи якоря. 46 Достоинства и недостатки реостатного способа регулирования скорости ДПТ па раллельного возбуждения.  Он связан с включением последовательно с якорем регулировочного реостата Rя.р  Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Достоинства простота осуществления и дешевизна. Недостатки оно неэкономично примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. плавность регулирования не большая. 47) Достоинства и недостатки реостатного способа регулирования скорости ДПТ неза висимого возбуждения изменением потока возбуждения.  Достоинства простота осуществления и дешевизна. Недостатки оно неэкономично примерно половина мощности, потребляемой из сети, будет рассеиваться в виде теплоты, выделяемой в реостате, т. е. плавность регулирования не большая. 48) Приведите вид механической характеристики ДПТ последовательного возбуждения при изменении напряжения источника питания.  Регулирование частоты вращения изменением напряжения сети, как и в двигателях параллельного возбуждения, возможно только в сторону уменьшения частоты вращения при питании двигателя от отдельного генератора или управляемого выпрямителя. Механическая характеристика при этом способе регулирования изображена на рис. 1.32, кривая 8. При наличии двух двигателей, работающих на общую нагрузку, они с параллельного соединения могут переключаться на последовательное, напряжение U на каждом двигателе при этом уменьшается вдвое, соответственно уменьшается и частота вращения. 50) Дайте пояснение характера изменения механической характеристики АД при регулировании напряжения ис точника питания.  Напряжение питающей сети напрямую влияет на момент эл. двигателя  т.е. момент изменяется пропорционально кв. напряжению где к-коэфф. зависящий от параметров АД и скольжения 49 Приведите вид механической характеристики ДПТ последовательного возбуждения при реостатном способе регулирования. Изменение возбуждения можно осуществить включением реостата Rр1 параллельно обмотке возбуждения (см. рис. 1.31) или включением реостата Rр2 параллельно якорю. При включении реостата Rр1 параллельно обмотке возбуждения магнитный поток Ф можно уменьшать от номинального до минимального Фmin. Частота вращения двигателя при этом будет увеличиваться (в формуле (1.11) уменьшается коэффициент k). Механические характеристики, соответствующие этому случаю, показаны на рис. 1.32, кривые 2, 3. При включении реостата параллельно якорю ток в обмотке возбуждения, магнитный поток и коэффициент k увеличиваются, а частота вращения двигателя уменьшается. Механические характеристики для этого случая изображены на рис. 1.32, кривые 4, 5. Однако регулирование вращения реостатом, включенном параллельно якорю, применяется редко, так как потери мощности в реостате и КПД двигателя уменьшается. |
 и
и  ;
; и
и  от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.
от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.