Электрооборудование лифтов. 1 Классификация и область работы скоростных лифтов 3 Классификация лифтов 4
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
Расчет и выбор элементов системы электрооборудования скоростного лифта Расчет мощности электродвигателя и его выбор На основании предыдущего расчета по каталогу предварительно выбирается асинхронный электродвигатель с короткозамкнутым ротором марки AHP160S6. Технические характеристики данного двигателя представлены в таблице 2: Таблица 2. Технические характеристики двигателя AHP160S6
Электродвигатели асинхронные трехфазные малошумные с короткозамкнутым ротором типа AMP160S6 - предназначен для комплектации электроприводов лебедок пассажирских, грузопассажирских и грузовых лифтов, административных и промышленных зданий. Номинальный режим работы - S1- S8 но мы его будем использовать в режиме повторно-кратковременный с частыми пусками и электромагнитным тормозом (S5) по ГОСТ 183-74. Степень защиты двигателя IP54 по ГОСТ 17494-87. Класс нагрев стойкости изоляции F по ГОСТ 8865-93. Способ охлаждения двигателя по ГОСТ 20495-75. Питание от сети переменного тока частотой 50 Гц напряжением 380 В. Среднеквадратичные значения вибрационной скорости двигателя составляет 2.8 м/с по ГОСТ 16921-83. Уровень шума двигателя регламентируется не только в стационарном режиме работы, но и в переходных режимах (при пуске двигателя и при переключении частоты вращения с высшей на более низкую). Показатели надежности: средний ресурс до капитального ремонта 30000 ч.; средняя наработка на отказ - 23000 ч.; гарантийный срок эксплуатации - 2 года со дня начала эксплуатации двигателя; гарантийная наработка на отказ - 10000 ч. Особенности конструкции. Короткозамкнутая монолитная обмотка ротора выполнена из сплава повышенного сопротивления для получения необходимых пусковых характеристик. Конструкционное исполнение по способу монтажа для двигателя AHP160S6 - пристраиваемое по ГОСТ 2479-79 (рис.5). 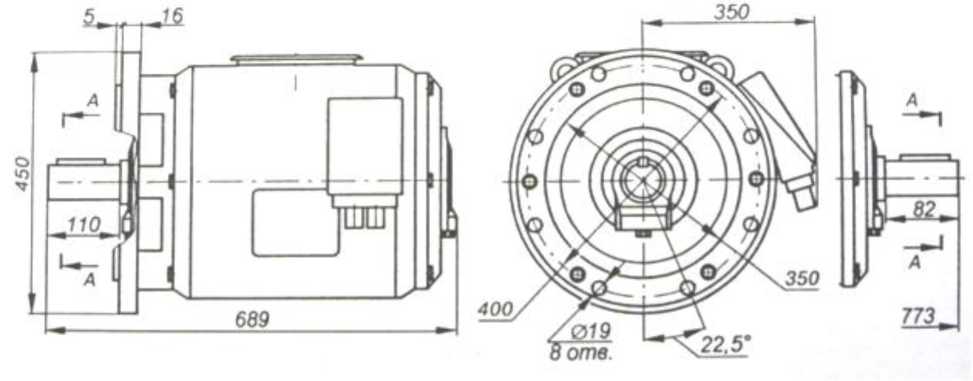 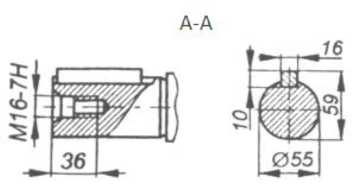 Рис.5 - Общий вид, габаритные, установочные и присоединительные размеры Фазы обмоток соединены в «звезду», три выходных конца обмоткивыведены во вводное устройство на клемную панель. В каждую обмотку устанавливают датчик температурной защиты типа СТ14-5 с температурой срабатывания 145 ОС. Двигатель имеет вводное устройство типа к-3-II расположенное сбоку станины - справа, если смотреть со стороны рабочего конца вала. Двигатель оснащен подшипником типа 6-313Ш2У. Изготовитель - ОАО «Валдайский механический завод». Находим номинальный момент двигателя: Построение упрощенной тахо грамма и нагрузочной диаграммы. Номинальный момент и критический момент электродвигателя определяются по формулам:  (1.8) (1.9) 9550-P 9550-11 M= = = 105Н - м nn 970 н Mr= 2.7 - M„ = 2.7 -108 = 291.6Н - м кн Скорость идеального холостого хода определяется по выражению:  (1.10) n 970 об n = —н— = = 1000 I 0 1 - s„ 1 - 0.03 мин н (1.11) (1.12) Момент инерции, приведенный к валу двигателя определяется по формуле: Jпр = Jд+1.1-Jм • (— )2; ®с где Jд - момент инерции электродвигателя, Jд = 0,043 кгм2; Jм -момент инерции исполнительного механизма, кпм2. Определим шм по формуле: — 2.5 рад о„ = — = = 11.1 мR 0.225 с шк где R ш - радиус канатоведущего шкива, м v - скорость механизма, м/с Так как масса канатов уравновешена - при равномерном движении статический момент не меняется, движение считаем поступательным и момент инерции механизма можно, описать следующим законом: (1.13) (1.14) — Jм = m z- (—)2; 0„ м где m s - масса всех тел ,кг. Масса тел определяется по выражению: G0 + Gnp + Gh m z1 = ; g где Gпр- сила тяжести противовеса, Gпр = 9650 Н; 5000 + 9200 + 8000 m= = 2265кг z 9.81                   2.5 J = 2265 • ( ) = 114 кг • м2 м 11.1 0 пр m s 2 = ; g (1.15) 5000 + 9200 = 1465кг 9.81 2.5 J = 1465 • ( )2 = 73.5 кг • м м м 11.1 Приведенный момент инерции загруженного лифта составляет(из 1.11): 11.1 J = 0.043 +1.1-114.89 • ( )2 = 1.46 кг • м2 пр 104.7 Приведенный момент инерции при отсутствии груза составляет: 11.1 Jm= 0.043 +1.1 • 73.5 • ( )2 = 0.95 кг • м2 пр 104.7 Для выбора среднего пускового момента электродвигателя определяется статический момент при нагруженном лифте: P 11000 Mr= -*- = = 105Н • м c a 104.7 (1.16) Выбирается минимальный момент электродвигателя во время пуска: M. = 1.8 • M = 1.8.108 = 194Н • м min н (1.17) Максимальный момент электродвигателя во время пуска принимается равным: M = 2.7 • M„ = 2.7 •108 = 291.6Н • м (1.18) max н Средний момент электродвигателя во время пуска составляет: Mср Mmax + Mmin . ; (1.19) Mср 291.6+194.4 = 243Н • м Следовательно, момент двигателя во время пуска с нагрузкой и без неё будет в одних значениях, как и во время пуска. Пусковое время электродвигателя с нагруженным лифтом (время пуска) определяется по формуле: tn = пM^ X + Mc max c 1.46 ■ 104.7 = 0.82 c 291.6 +105 (1.20) Так как время пусков невелико в сравнении со временем работы при установившейся скорости, то можно остановиться на их приближенном расчете. Приближенно определяется также путь при переходных процессах. Время торможения нагруженного и ненагруженного лифта под действием электромагнитного тормоза с моментом Мт 100 Н •м определяется по формуле: t = т M + M ст 1.46 ■104.7 = 0.75c 105 +100 (1.21) Путь нагруженного и ненагруженного лифта при пуске определяется по формуле: л■ D■ n 3.14■ 0.45■ 970 н ■ t„ = 0.82 = 1.27м 2 ■ 60 ■ iп 2 ■ 60 ■ 9 (1.22) Путь нагруженного ненагруженного лифта при торможении определяется по формуле: п 2 т 2 ■ 60 ■ i 3.14■ 0.45■ 970 _ ■ t= 0.75 = 0.95м т 2■60■9 (1.23) Путь нагруженного лифта при установившейся скорости, при совершении им семи остановок составляет: l = l-6■ ln-6■ lT= 75- 6-1.27-6■ 0.95 = 61.68м (1.24) Скольжение и скорость электродвигателя при Мс 105 определяются по формуле: s = sH■ — = 0.03 ■105 = 0.029 = 2.9% 108 (1.25) n = no ■ (1 - s) = 1000 ■ (1 - 0.029) = 971 об мин (1.26) Время движения лифта с установившейся скоростью, при совершении им семи остановок составляет: t=-lL v ■ 7 61.68 2.5 ■ 7 = 3.52 с (1.27) Ускорение и рывок необходимо ограничивать для безопасности людей. А так же ускорение и рывок должны быть максимально по величине большими, так как в обратном случае эффективность движения лифта будет снижаться, а пассажиры будут терять время, в связи с этим зададимся целью выявить V(t) при уменьшении ускорения и рывка. В три этапа проходит по оптимальной кривой разгон: Рывок p = conts> 0, ускорение нарастает линейно, а скорость - по параболе. Продолжительность данного этапа равна (1.28) a2 t= — = — = 0.5 с p4 Скорость движения кабины в конце данного этапа составляет:    P-Ati2 2 4 - 0.52 2 м = 0.5 — с (1.29) Рывок равен нулю, ускорение постоянно, а скорость - по линейному закону. Продолжительность данного этапа равна: . va 2.5 2 Z1 A t2= = = 0.75 с (1.30) ap 24 Скорость движения кабины в конце данного этапа составляет: v = v + a-A t2 = 0.5 + 2 - 0.75 = 2 — (1.31) с Рывок p = const< 0, ускорение уменьшается линейно, а скорость - по обратной параболе. Продолжительность данного этапа равна: At= At= 0.5с (1.32) Скорость движения кабины в конце данного этапа равна установившемуся значению. Полное время разгона равно: t„ =A L +A t, +A L = 2-A t +A t, = 2 - 0.5 + 0.75 = 1.75с (1.33) p 123 12 Если предположить, что ускорение постоянно, то время разгона равно. (1.34) v 2.5 t = =— = 1.25 c pa 2 Аналитически функция скорости движения кабины лифта от времени определяется по формуле:      v(t) = • A( t ,0, Дt) + [ Vj + a •( t - Д t )]• <>( t, Д t, Д t + Д t2) , p • (t - Д t - Д t,) V2 + (———-) • (t - Д ti - Д12) • J( t, Д ti +Д12, tp) + (1.35) Скорость угловая вращения вала электродвигателя связана с линейной 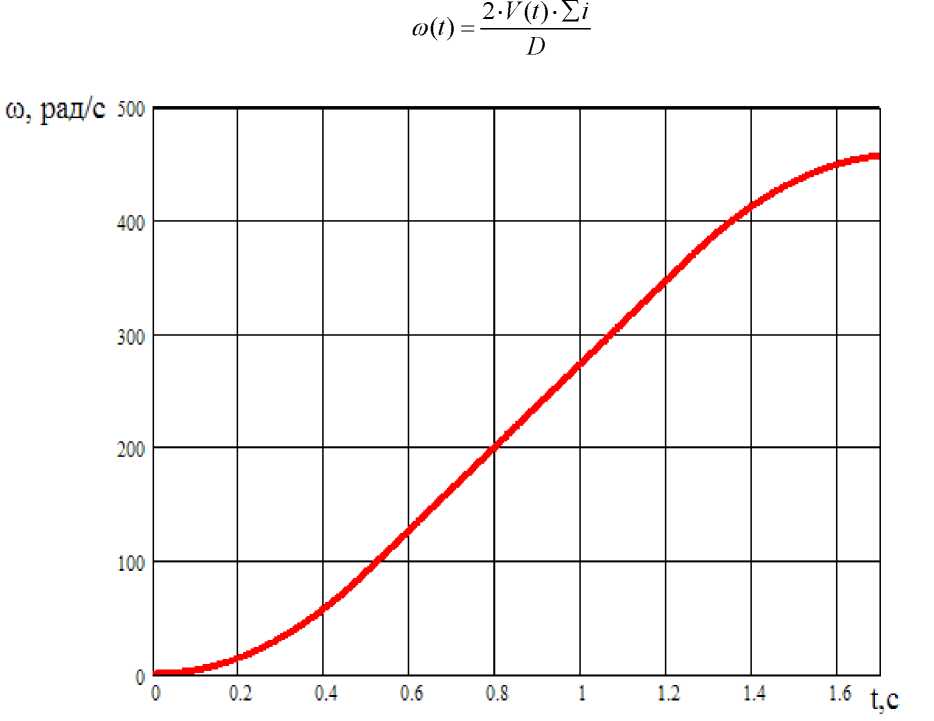   скоростью движения уравнением: Рис.6 - Кривая разгона электродвигателя при ограничении рывка и ускорения. 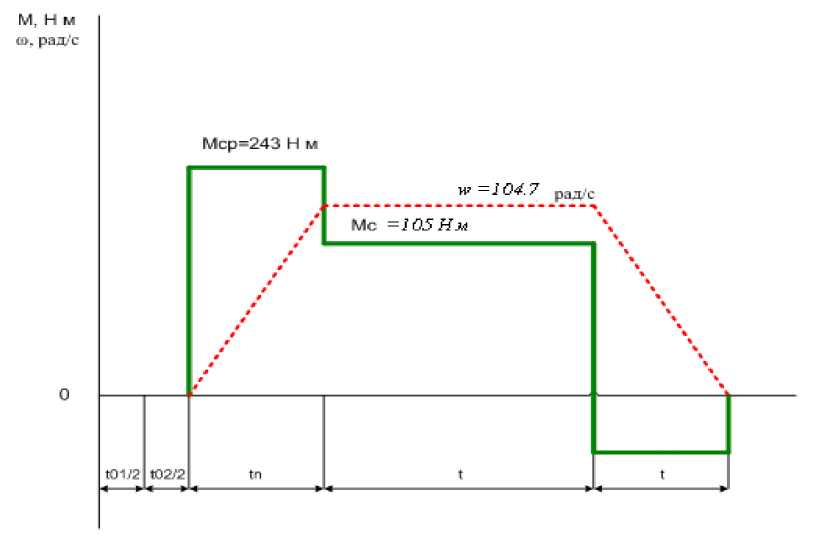    Рис.7 Тахо грамма электродвигателя и нагрузочная диаграмма AHP160S6.
При в = 0,5 и ПВ = 49 % (1.35) (1.36) 7 • (2432 • 0.82) + 7 • (1052 • 0.82) 4 = 103.3Н 0 0.5 • 7 • 0.82 + 7 • 3.52 После перерасчета на ПВ = 100 % получим: ПВ 49 M= M • э- = 103.3• = 72.3Н• м э э1 ППВН V100 МЭ < Мн;72.3Н • м < 108Н • м Из расчетов предварительно выбранныйэлектродвигатель проходит проверку по условию нагрева. |