ЭКЗ.Эл.привод. 1 Понятие электропривода. Электропривод
 Скачать 2.16 Mb. Скачать 2.16 Mb.
|

|
Электродинамическое торможение получают отключением обмотки статора от сети переменного тока и подключают к источнику постоянного напряжения, обмотка ротора включается на дополнительное сопротивление. Регулировать интенсивность динамического торможения можно изменяя величину тока возбуждения Iдт в обмотках статора. Чем выше ток, тем больший тормозной момент развивает двигатель. Возбуждение асинхронной машины в режиме динамического торможения может осуществляться не только подачей постоянного тока в обмотки статора машины, но также в режиме самовозбуждения путем подключения конденсаторов к цепям статора асинхронной машины. Такой способ торможения называют конденсаторным торможением асинхронных двигателей. По энергетической сущности этот вид торможения идентичен динамическому торможению, т.к. энергия, поступающая с вала, преобразуется в электрическую и выделяется в виде потерь в роторе двигателя. Процесс самовозбуждения асинхронного двигателя происходит следующим образом. Под действием остаточного потока ротора в обмотках статора наводится э.д.с., под действием которой возникает намагничивающий ток, протекающий через конденсаторы. При этом увеличивается поток машины, следовательно, наводимая э.д.с. и ток намагничивания 81) Как перевести асинхронный двигатель из двигательного в генераторный режим работы? Если ротор разогнать с помощью внешнего момента до частоты, большей частоты вращения магнитного поля статора, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдет в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение S < 0. 82) Как перевести асинхронный двигатель в режим противовключения? Практически режим противовключения получают изменением порядка следования фаз сети в обмотке статора. Изменение порядка следования фаз осуществляется переключением двух любых линейных проводов, подведенных к статору двигателя. При этом двигатель будет затормаживаться до скорости  . В момент, когда , двигатель необходимо отключить от сети, иначе он будет разгоняться в противоположном направлении. . В момент, когда , двигатель необходимо отключить от сети, иначе он будет разгоняться в противоположном направлении.83) Как перевести асинхронный двигатель в режим электродинамического торможения? Схемы включения обмоток в режиме электродинамического торможения. Динамическое торможение асинхронного двигателя осуществляется отключением статора двигателя от сети переменного тока и включением его на сеть постоянного тока. Ротор при отключении двигателя продолжает вращаться по инерции. По обмоткам статора начинает протекать постоянный ток, который образует неподвижное магнитное поле статора. Под действием этого поля в обмотках вращающегося ротора наводится ЭДС. А так как обмотка ротора замкнута на сопротивление, то по ним протекает ток, величина которого определяется значением наводимой ЭДС и сопротивлением цепи ротора. Взаимодействие неподвижного магнитного потока статора с током ротора создает тормозной момент двигателя. 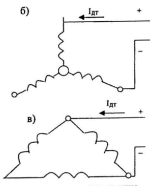 84) Как образуется вращающееся магнитное поле статора синхронного двигателя? Его создание достигается одновременным выполнением двух условий: 1. Размещением трех обмоток с одинаковыми электрическими параметрами в одной плоскости вращения с равным угловым смещением (Δα=360°/3=120°); 2. Пропусканием по этим обмоткам равных по величине и форме синусоидальных гармоник токов, которые сдвинуты по времени на треть периода (по угловой частоте на 120°). Кратко: обмотки статора сдвинуты по поверхности статора на 1200 и подключены к трехфазной сети с фазовым сдвигом напряжений на 1200 85) Достоинства синхронного двигателя по сравнению с асинхронным. Достоинства: 1) синхронные двигатели могут работать с высоким, близким к единице, коэффициентом мощности; 2) в режиме перевозбуждения имеется возможность увеличить сети; 3) КПД выше примерно на 1,5%, (96–98%); 4) за счет изменения Ib можно регулировать перегрузочную способность двигателя; 5) абсолютно жесткая механическая характеристика; 6) меньшая зависимость вращающего момента от колебаний напряжения сети (в первой степени, а у асинхронных двигателей – во второй); 7) обладает большей надёжностью. 86) Что определяется число пар полюсов обмотки статора синхронного двигателя? Для двигателей переменного тока (асинхронных и синхронных) число пар полюсов определяет скорость вращения, т. е. число оборотов в минуту. Оно определяется из следующей зависимости: 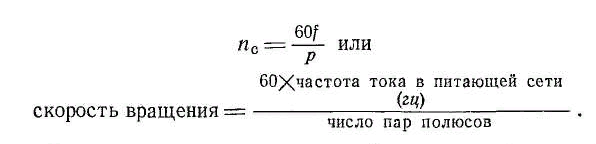 87) Отличия явнополюсного от неявнополюсного типов ротора синхронного двигателя. Отличие явнополюсного от неявнополюсного типов ротора синхронного двигателя заключается в том, что у двигателя с неявнополюсной конструкцией ротора имеется симметричная в магнитном отношении конструкцию, а у двигателя с явнополюсной конструкцией ротора, имеется несимметричная магнитная цепь. Явнополюсный (с явновыраженными полюсами) ротор обычно используют в машинах с четырьмя и большим числом полюсов, а неявноплюсный ротор обычно использую с двумя и четырьмя полюсами. 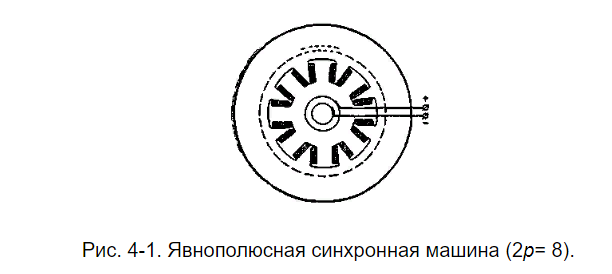  Имеется разная конструкция, у явнополюсный ротор – выступающие полюсы с обмоткой возбуждения, а у неявнополюсный ротор – распределенная обмотка возбуждения в пазах цилиндра ротора. Также неявнополюсные роторы применяются в синхронных машинах большой мощности, при скорости вращения 𝑛2 = 3000 или 1500 об/мин, а явнополюсные применяются в машинах большой мощности при скорости вращения 750, 500 об/мин. 88) Способы возбуждения синхронного двигателя. В современных синхронных двигателях для возбуждения применяют тиристорные возбудительные устройства, включаемые в сеть переменного тока и осуществляющие автоматическое управление током возбуждения во всевозможных режимах работы двигателя, в том числе и переходных. Такой способ возбуждения является наиболее надежным и экономичным, так как КПД тиристорных возбудительных устройств выше, чем у генераторов постоянного тока. В синхронных машинах малой мощности находит применение принцип возбуждения постоянными магнитами, когда на роторе машины располагаются постоянные магниты. Такой способ возбуждения дает возможность избавить машину от обмотки возбуждения. В результате конструкция машины упрощается, становится более экономичной и надежной. 89) Для какого типа ротора синхронного двигателя характерно наличие реактивного момента? Наличие реактивного момента характерно для явнополюсного типа ротора синхронного двигателя. 90) Схемы соединения обмоток статора синхронного двигателя. 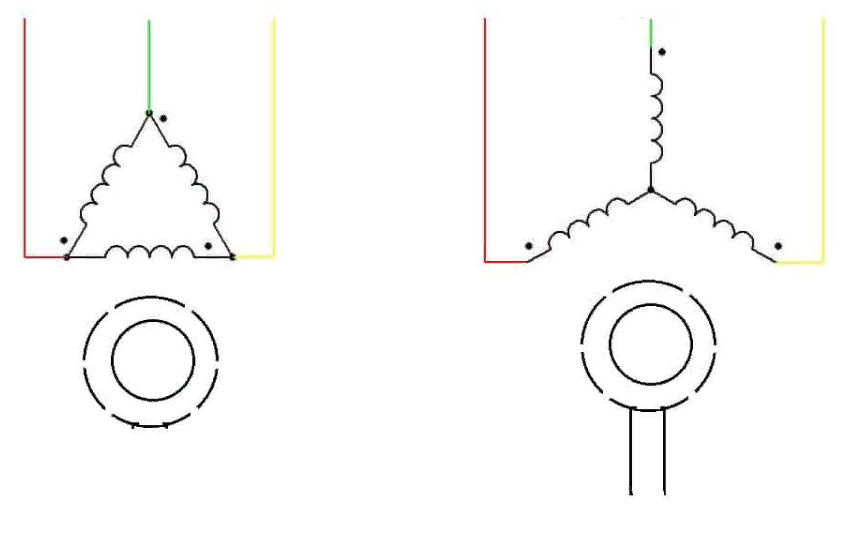 91) Как производится запуск синхронного двигателя с помощью пусковой обмотки? Пуск синхронных двигателей осуществляется в асинхронном режиме. Для этого в конструкции ротора предусмотрена короткозамкнутая обмотка, конструкция которой аналогична клетке ротора асинхронного короткозамкнутого двигателя. Ротор имеет массивную конструкцию и роль пусковой клетки играет само тело ротора. При разгоне до подсинхронной скорости двигатель работает как асинхронный короткозамкнутый с механической характеристикой. По достижении подсинхронной скорости, которая должна быть не менее чем 0,95 ω0, в обмотку возбуждения подается постоянный ток, и двигатель втягивается в синхронизм, переходя на работу, соответствующему синхронному режиму. При работе в установившемся режиме с синхронной скоростью ток в пусковой клетке не протекает. Пусковая клетка ротора рассчитывается на кратковременный режим работы, и длительная (свыше 20-30с) работа в асинхронном режиме недопустима.  92) Как определить угол нагрузки синхронного двигателя? Угол нагрузки увеличивается по мере нагружения синхронной машины.  При появлении на валу двигателя момента сопротивления векторы Ф1 (вращающееся в пространстве электромагнитное поле статора) , и Ф0 (электромагнитное поле создаваемое током возбуждения (источника напряжения — возбудителя)) расходятся (как бы растягиваются подобно пружине) на угол θ, называемый углом нагрузки, причем, если вектор Ф0 отстает от вектора Ф1 , (см. рис. 3.24,6), то синхронная машина работает в двигательном режиме и электромагнитный момент на ее валу положителен. Если синхронная машина работает генератором, приводимым во вращение первичным двигателем, то вектор поля ротора опережает вектор поля статора на угол (-θ) и электромагнитный момент на валу машины отрицателен. 93) Для каких механизмов применяется синхронные двигатели? Синхронные двигатели применяются в основном в приводах большой мощности. Мощность их достигает нескольких десятков мегаватт. На тепловых станциях, металлургических заводах, шахтах, Холодильниках приводят в движение насосы, и другие механизмы, работающие с неизменной скоростью. 94) Вид механической характеристики синхронного двигателя. Механическая характеристика синхронного двигателя имеет вид горизонтальной прямой, т. е. частота вращения его не зависит от нагрузки. С увеличением нагрузки возрастает угол θ — угол между векторами напряжения сети Uc и ЭДС обмотки статора Е0.  95) Угловая характеристика явнополюсного и неявнополюсного синхронного двигателя. Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Например, для явнополюсного двигателя электромагнитная мощность равна: В неявнополюсном двигателе xq=хd, и поэтому вторая составляющая Р" будет отсутствовать. Электромагнитный момент получим, если (3) разделим на угловую скорость поля и ротора  96) От чего зависит угол нагрузки синхронного двигателя. Угол нагрузки зависит нагрузки синхронной машины. 97) Режимы работы синхронного двигателя. Синхронные машины работают в трех режимах: генераторном, двигательном и в режиме синхронного компенсатора. В режиме двигателя синхронные машины используются в качестве приводных двигателей мощных насосов, вентиляторов, воздуходувок. Предельная мощность синхронных двигателей достигает нескольких сотен мегаватт. Синхронные компенсаторы применяются в качестве генераторов реактивной мощности для повышения коэффициента мощности нагрузки предприятий, а также для регулирования величины напряжения. Они отличаются от синхронных двигателей более легкой конструкцией, так как работают в режиме холостого хода без механической нагрузки. Синхронный генератор – это устройство, которое позволяет преобразовывать различные типы энергии в электричество. Используются такие агрегаты на различных электростанциях, транспортных системах и производствах. 99) Особенности конструкции и формы питающего напряжения вентильно-индукторного двигателя. Вентильно-индукторные электроприводы, используют индукторную электрическую машину с пассивным ротором. На статоре такой машины располагаются электромагниты - индукторы по обмоткам которых поочередно пропускается постоянный ток. Ротор двигателя не имеет обмоток (пассивный) и содержит ряд зубцов, число которых не совпадает с числом зубцов магнитопровода статора. Машина управляется вентильным (транзисторным) коммутатором VT, осуществляющим переключение обмоток индукторов. Основная особенность вентильно-индукторных приводов заключается в том, что переключение обмоток индукторов производится в соответствии с положением ротора, для чего в схеме применяется датчик положения DR. Принцип работы вентильно-индукторного привода состоит в поочередном последовательном включении индукторов (а-а, в-в, с-с), поток которых замыкается через зубцы ротора. Возбуждение индуктора вызывает возникновение электромагнитных сил притяжения между зубцами индуктора и ближайшими к ним зубцами ротора. В ее состав входят: индукторная машина (ИМ), преобразователь частоты, система управления и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИД очевидно: преобразователь частоты обеспечивает питание фаз ИМ однополярными импульсами напряжения прямоугольной формы; ИМ осуществляет электромеханическое преобразование энергии, система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом. 100) Форма механической характеристики вентильно-индукторногодвигателя. !!!СПРОСИТЬ!!! 101) Принцип создания электромагнитного момента вентильно-индукторного двигателя. Величина электромагнитного момента определяется средней величиной тока, подаваемого в обмотки индукторов. Поэтому регулирование момента двигателя производится изменением напряжения, подводимого к обмоткам индуктора. 102) Режимы работы вентильно-индукторного двигателя. 103) Причины возникновения переходных процессов. Переходным процессом (переходным режимом) электропривода называется протекающий во времени процесс перехода от одного установившегося режима работы (или отключенного состояния; к другому установившемуся состоянию. Причиной возникновения переходных процессов могут быть: • управляющие воздействия (включение - отключение электропривода, изменение задания на скорость привода и др.); • возмущающие воздействия, главным из которых является изменение нагрузки на валу двигателя (изменение Mс). 104) У каких механизмов можно не учитывать влияние переходных процессов? Существуют электромеханические и электромагнитные переходные процессы 108.Какие переходные процессы существуют в электроприводе постоянного тока? Существуют электромеханические и электромагнитные переходные процессы   109.Процесс изменения тока возбуждения при подключении обмотки возбуждения к источнику питания. ?? 110.Чем определяется электромеханическая постоянная времени двигателя постоянного тока? Электромеханическая постоянная времени двигателя постоянного тока определяется суммой момента инерции якоря двигателя и моментами инерции всех движущихся частей рабочей машины, приведенными к валу двигателя JΣ- суммарный момент инерции якоря двигателя, β- жесткость мех.хар-ки, С-коэф.передачи, Rя- сопротивления якоря  111.Как влияет отрицательная обратная связь на характер переходных процессов? Отрицательная обратная связь уменьшает фазовые сдвиги в усилителе, и фазовая характеристика приближается к линейной. Фазовые искажения в усилителе под действием отрицательной обратной связи уменьшаются. Переходная характеристика в усилителях с отрицательной обратной связью также улучшается, поскольку уменьшается время восстановления. Это происходит вследствие уменьшения входной емкости усилительных приборов под действием отрицательной обратной связи. 112.Как определить электромагнитную постоянную времени якорной цепи? Она определяется по формуле:  где Lя - индуктивность якоря, Гн; Rя - сопротивление якоря, Ом. 116.Какие существуют энергетические показатели электропривода? Анализируя эффективность использования электрической энергии, следует различать энергетическую эффективность самого технологического процесса, который осуществляется рабочей машиной с электроприводом, и эффективность собственно электропривода, характеризуемую его коэффициентом полезного действия – кпд |