ЭКЗ.Эл.привод. 1 Понятие электропривода. Электропривод
 Скачать 2.16 Mb. Скачать 2.16 Mb.
|

|
55) Каким образом осуществляется реверсирование двигателя постоянного тока независимого возбуждения? Реверсирование (изменение направления вращения) двигателей независимого возбуждения производится изменением полярности напряжения, подводимого к якорю двигателя или к обмотке его возбуждения. 56) Основное конструктивное отличие двигателя постоянного тока независимого возбуждения от двигателя постоянного тока последовательного возбуждения. У ДПТ-НВ обмотка возбуждения подключается к независимому источнику. В то время, как у ДПТ-ПВ обмотка возбуждения включается последовательно в цепь якоря, по ним течет один и тот же ток. А также у ДПТ-ПВ обмотка возбуждения выполнена проводом большего сечения, чем у обмотки ДПТ-НВ, т.к по ней протекает большой ток нагрузки. 57. Вид естественной и идеальной механической характеристики двигателя постоянного тока последовательного возбуждения? 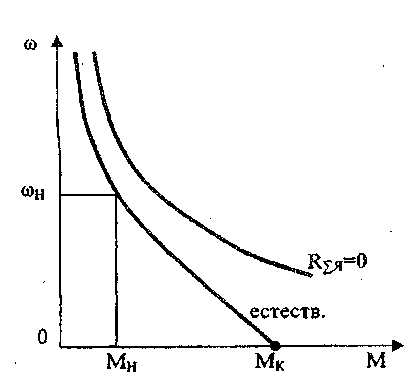 Естественная и «идеальная» механическая характеристика двигателя последовательного возбуждения. Реальная естественная характеристика пересекает ось абсцисс в точке, соответствующей току короткого замыкания (момент Мк). Выше «идеальной» характеристики, не может быть других характеристик. 58. Вид характеристик при изменении сопротивления и напряжения? При изменении сопротивления – этот способ регулирования используется при пуске двигателя. При введении добавочного сопротивления в цепь якоря жесткость механических характеристик уменьшается и уменьшается значение Мк. Реостатное регулирование сопряжено с потерей энергии в добавочных сопротивлениях. 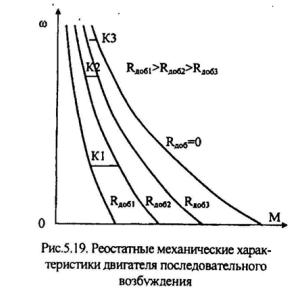 При изменении напряжения 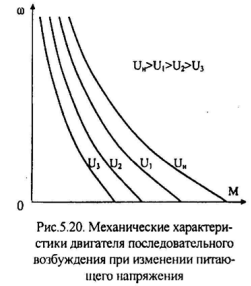 По мере уменьшения напряжения они смещаются вниз параллельно естественной характеристике. При регулировании изменением напряжения дополнительные потери отсутствуют. 59. Достоинства двигателя постоянного тока последовательного возбуждения. К основным достоинствам двигателей постоянного тока относятся: Большая перегрузочная способность; отсутствие дополнительного источника питания для обмотки возбуждения; простота конструкции; легкость в управлении; возможность регулирования частоты вращения вала; легкий запуск (особенно у двигателей с последовательным возбуждением); возможность использования в качестве генераторов; компактные размеры. 60. Для каких механизмов применяется электропривод с двигателя постоянного тока последовательного возбуждения? Двигатели постоянного тока с последовательным возбуждением используются в тяговом приводе (трамваях, электровозах, автомобильных стартерах и в других машинах), где работа происходит в условиях быстро прикладываемых значительных нагрузок. Обычно такие двигатели соединяются с приводимыми в движение машинами с помощью шестереночных, а не ременных передач, поскольку если при работе двигателя нагрузка на него резко снижается, то двигатель разгоняется до опасной скорости (они не имеют ограничения скорости и уходят в разнос без нагрузки). 61. Какой ток протекает по обмотке последовательного возбуждения? Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. 62. Каким образом осуществляется реверсирование двигателя постоянного тока последовательного возбуждения? Для реверсирования ДПТ-ПВ нужно изменить направление тока в одной из частей машины в обмотке возбуждения, оставив направление тока в обмотке якоря неизменным. 63. Режимы работы двигателя постоянного тока последовательного возбуждения? Двигатели последовательного возбуждения могут работать в двигательном и в двух режимах торможения: противовключения и динамического торможения. Они не могут перейти в режим рекуперации, для его осуществления необходимо шунтирование якоря двигателя, либо применение отдельной дополнительной обмотки независимого возбуждения. Они не могут перейти в режим рекуперации, т.к. для этого требуется изменение направления тока якоря, а полярность полюсов и направление ЭДС должны остаться неизменными 64. Как перевести двигатель постоянного тока последовательного возбуждения из двигательного в генераторный режим работы? Объяснить схему шунтирования обмотки якоря. 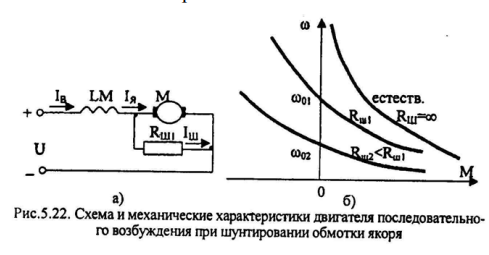 Чтобы перевести двигатель постоянного тока последовательного возбуждения из двигательного в генераторный режим работы необходимо изменить поток возбуждения, это достигается шунтированием обмотки якоря сопротивлением. Шунтирование якоря позволяет получить устойчивую пониженную скорость при отсутствии нагрузки на валу двигателя. В данной схеме возможен переход из двигательного режима в режим рекуперативного торможения (генераторный режим), при скорости ω > ω01, или ω > ω02. 65. Как перевести двигателя постоянного тока последовательного возбуждения в режим противовключения? Для перевода из двигательного режима, соответствующего подъему груза, в режим противовключения, соответствующий тормозному спуску, в цепь якоря двигателя вводится добавочное сопротивление. 66. Как перевести двигателя постоянного тока последовательного возбуждения в режим электродинамического торможения? Режим динамического торможения для двигателей последовательного возбуждения возможен в двух вариантах. 1) В первом - якорь двигателя замыкается на сопротивление, а обмотка возбуждения питается от сети через добавочное сопротивление. 2) Во втором варианте, двигатель работает как генератор с самовозбуждением. Особенность данной схемы состоит в том, что при переходе из двигательного режима в режим динамического торможения необходимо сохранить направление тока в обмотке возбуждения во избежание размагничивания машины. (переключить полярность якоря или обмотки возбуждения таким образом, чтобы ток в последней имел такое же направление, что и в двигательном режиме, иначе самовозбуждения не произойдет.) Кроме того, чтобы возбуждение возникло, скорость двигателя должна быть достаточной и выполнялось условие: ЭДС якоря, определяемая величиной Ф и скоростью вращения была больше падения напряжения в сопротивлении тормозного контура, т.е. 67) Как образуется вращающееся магнитное поле статора асинхронного двигателя? Условия получения: наличие не менее двух обмоток; токи в обмотках должны отличаться по фазе; оси обмоток должны быть смещены в пространстве. Наложение >2 разнонаправленных МП одинаковой частоты. 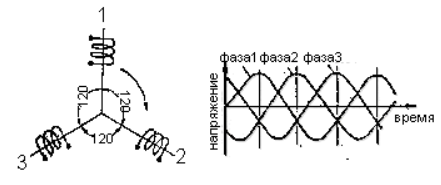 Напряжение достигает максимального значения не одновременно во всех трех фазах, а попеременного, через разные промежутки времени, то в одной, то в другой, то в третье фазе. Следовательно, если включить такой ток в три обмотки, расположенные так, как на рисунке, максимальное значение магнитного потока будет создаваться то в первой, то во второй, то в третье обмотке, соответственно максимальным значениям тока в фазах, подключенных к этим обмоткам. Магнитное поле, перемещающееся таким образом по замкнутому кругу, называется вращающимся магнитным полем. 68) Что определяется числом пар полюсов обмотки статора асинхронного двигателя? Числом пар полюсов определяется скорость идеального холостого хода  ; частота вращения ротора ; частота вращения ротора  ; ;69) Типы обмоток ротора асинхронного двигателя. По способу выполнения обмотки ротора асинхронные двигатели делятся на две группы: асинхронные двигатели с фазным ротором и асинхронные двигатели с короткозамкнутым ротором. Асинхронные двигатели с фазным ротором имеют на роторе полноценную трехфазную обмотку. На роторе асинхронного двигателя с короткозамкнутым ротором расположены медные и алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. 70) Схемы соединения обмоток статора асинхронного двигателя. 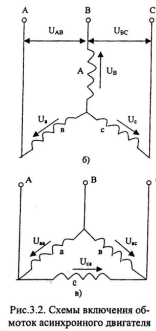 В асинхронных трехфазных двигателях используются два способа соединения фаз обмоток между собой: в звезду и треугольник. Эти соединения могут выполняться как внутри машины (глухое соединение), так и вне двигателя – с помощью сменных перемычек на специальном щитке. В первом случае к выводному щитку подводятся три вывода, во втором – шесть (начала и концы фаз). 71) К чему приводит изменение числа пар полюсов многоскоростных асинхронных двигателей? Изменение числа пар полюсов приводит к изменению скорости вращения двигателя, при увеличении числа пар полюсов скорость вращения уменьшается и наоборот, при уменьшении числа пар полюсов скорость вращения увеличивается. 72) Как определяется скольжение асинхронного двигателя? Скольжение S – отставание скорости вращения ротора  от скорости вращения магнитного поля в статоре от скорости вращения магнитного поля в статоре  , выраженное в относительных единицах: , выраженное в относительных единицах:   73) Где применяются асинхронные двигатели с фазным ротором? За счет высокого крутящего момента, низких пусковых токов и способности долговременного работать при повышенных нагрузках, используются там, где необходима большая мощность электродвигателя, но нет необходимости плавно регулировать скорость вращения в высоких диапазонах. Используются на различном серьезном, тяжелом силовом оборудовании, например, подъемных кранах, лифтовых приводах, станках, различных подъемниках. Эти двигатели используются там, где есть необходимость запуска под нагрузкой, а не на холостом ходу. 74) Запуск асинхронного двигателя с фазным ротором. Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжения  , зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора. , зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора. При пуске двигателя сначала вводится полное добавочное сопротивление R1доб. По достижении скорости, при которой момент двигателя MII становится близким к моменту сопротивления Мс, часть пускового сопротивления шунтируется контактором К1, и двигатель переходит на характеристику, соответствующую величине добавочного сопротивления R2доб. При этом момент двигателя увеличивается до значения MI. По мере дальнейшего разгона двигателя контактором К2 закорачивается вторая ступень пускового сопротивления. После замыкания контактов контактора К3 двигатель переходит на естественную характеристику и будет работать су становившейся скоростью. 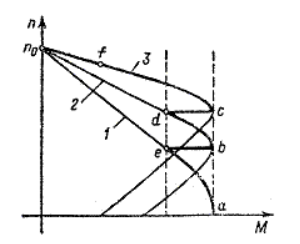  В момент пуска рабочая точка на механической характеристике находится в точке a, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке e, включается первая ступень реостат и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку c и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец. Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате. 75) Виды схем замещения асинхронного двигателя. В расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.   76) Основные точки механической характеристики асинхронного двигателя.  1 – точка идеального холостого хода: 2 – точка номинального режима работы:  3 – точка критического момента:  4 – точка пуска:  77) От чего зависит скорость идеального холостого хода, критическое скольжение, критический и пусковой момент? Скорость идеального холостого хода зависит от частоты сети и числа пар полюсов; Критический момент зависит от подведенного напряжения, скорости идеального холостого хода и сопротивления;  Пусковой момент зависит от номинального момента и кратности пусков (паспортная величина);  78) Чем опасно снижение напряжения питания статора асинхронного двигателя? При снижении напряжения питания статора уменьшается электромагнитный момент двигателя (следовательно и крутящий момент) => Скорость вращения двигателя снижается. Снижение частоты вращения означает увеличение скольжения двигателя. При увеличение скольжения увеличивается ЭДС и ток в обмотке ротора. При этом, результирующее сопротивление статора уменьшается, а ток увеличивается => Происходит разогрев обмоток, может повредиться изоляция и машины выйдет из строя. 79) Каким образом осуществляется реверсирование асинхронного двигателя? Для смены направления вращения ротора двигателя, необходимо поменять местами две из трех фаз статорной обмотки. После этого вращающееся поле изменит свое направление вращения, но ротор, вращаясь в прежнем направлении и обладая инерцией под действием магнитного поля статора начнет затормаживаться до полной остановки, а затем начнет вращаться в другом направлении. 80) Режимы работы асинхронного двигателя.   Асинхронный двигатель может работать в двигательном режиме, в режиме генераторного торможения, в режиме торможения противовключением и в режиме электродинамического торможения, специфическим тормозным режимом является также конденсаторное торможение. Генераторное торможение с отдачей энергии в сеть – это такой тормозной режим, когда скорость двигателя под действием внешних сил или сил инерции становится выше скорости идеального холостого хода (синхронной скорости). Двигатель препятствует нарастанию скорости, при этом механическую энергию, поступающую от рабочего механизма, за исключением потерь в статоре, преобразует в электрическую и возвращает её в сеть, а мощность скольжения рассеивается в роторной цепи. Двигатель работает в режиме генератора. Торможение противовключением может быть в двух случаях: - в первом, когда при работе двигателя необходимо его экстренно остановить, и с этой целью меняют порядок чередования фаз питания обмоток статора двигателя. Двигатель, работавший в т.1, после изменения порядка чередования фаз двигателя переходит в тормозной режим в т. ' 1 , и скорость привода быстро снижается под действием тормозного момента Мт и статического момента Мс. При замедлении до скорости, близкой к нулю, двигатель необходимо отключить, иначе он будет разгоняться в противоположном направлении вращения.; - во втором, когда электромеханическая система движется в отрицательном направлении под действием спускаемого груза, а двигатель включается в направлении подъема, чтобы ограничить скорость спуска (режим протягивающего груза). После снятия механического тормоза двигатель, включенный в направлении вверх, под действием силы тяжести спускаемого груза будет вращаться в противоположном направлении со скоростью, соответствующей точке 2. Работа в режиме противовключения под действием протягивающего груза возможна при использовании двигателей с фазным ротором. При этом в цепь ротора вводится значительное добавочное сопротивление, которому соответствует характеристика 2. 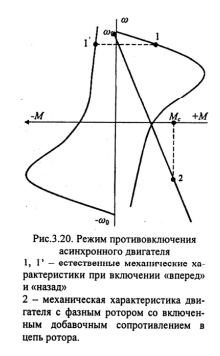 В обоих случаях электромагнитное поле статора и ротор двигателя вращаются в разные стороны. Скольжение двигателя в режиме противовключения всегда больше 1. это такой тормозной режим, когда двигатель включают на одно направление вращения, а его вал под действием внешних сил или сил инерции вращается в обратную сторону. Необходимое условие – включение в цепь ротора большого добавочного сопротивления. (Работа двигателя в режиме противовключения за счет внешних сил и реверс на ходу) |