ЭКЗ.Эл.привод. 1 Понятие электропривода. Электропривод
 Скачать 2.16 Mb. Скачать 2.16 Mb.
|

|
1) Понятие электропривода. Электропривод – это техническая система, предназначенная для приведения в движение рабочего органа технологической машины и целенаправленного управления движения им, состоящая из электрического преобразовательного устройства (ЭПУ), электромеханического преобразователя (или электродвигательное устройство) (ЭМП), механического передаточного устройства (МПУ) и информационно управляющего устройства (ИУУ). ЭПУ – устройство для согласования параметров сети и электрической машины, а также регулирование параметров для управления движением РО. ЭМП – основной элемент ЭП, преобразует эл.энергию в механическую и обратно. МПУ – предназначен для согласования параметров механической мощности с выхода эл.машины на вход РО. ИУУ – предназначен для управления электроприводом, а также для сбора данных (угловая скорость, положение (путь), токи двигателя, момент двигателя). 2) Основные функции электропривода. 1. Преобразование электрической энергии в механическую. 2. Управление параметрами механической энергии (мощность, усилие, крутящий момент, скорость, ускорение, путь и угол перемещения). 3. Обеспечение защит, блокировок и сигнализаций при работе технологического оборудования. 4. Сбор данных и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей. 5. В случае если рабочая машина или техн.комплекс имеет несколько РО, каждый из которых приводиться в движение своим электрическим приводом, в задачу управления входит согласование движения РО в соответствии с требованиями тех.процесса. 3) Объяснить назначение электропривода. Преобразование электрической энергии в механическую и обратно, а также управление этими процессами. 4) Структура электропривода. Электропривод имеет два канала - силовой и информационный. По первому транспортируется преобразуемая энергия, по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей. Силовой канал в свою очередь состоит из двух частей – электрической (сеть, преобразователь эл.энергии, электродвигатель) и механической (подвижный элемент). Силовой канал ЭП образуют электродвигательное, передаточное и преобразовательное устройства. ЭПУ – устройство для согласования параметров сети и электрической машины, а также регулирование параметров для управления движением РО. ЭМП – основной элемент ЭП, преобразует эл.энергию в механическую и обратно. МПУ – предназначен для согласования параметров механической мощности с выхода эл.машины на вход РО. 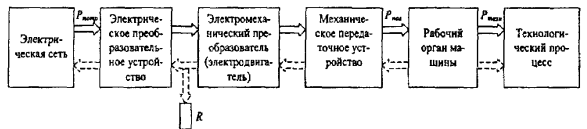 Информационный канал состоит из совокупности ИУУ, предназначенных для управления параметрами (координатами) ЭП в соответствии с требованиями ТП. ИУУ – состоит из аппаратов управления и защиты, осуществляющих включение, пуск, остановку ЭП и защиту от аварийных и аномальных режимов работы. 5) Какой элемент обязательно присутствует в структуре электропривода? Электромеханический преобразователь (или электродвигательное устройство) (ЭМП) – основной элемент ЭП, преобразует эл.энергию в механическую и обратно. 6) Какой элемент структуры современного электропривода стремятся для повышения коэффициента полезного действия электропривода и надежности? ЭПУ применяются в регулируемом электроприводе для целенаправленного и экономичного изменения параметров движения электропривода: скорости, развиваемого момента и др. управляемые выпрямители, преобразователи частоты и другие. Электрическое преобразовательное устройство обычно представляет собой преобразователь, выполненный на силовых полупроводниковых приборах: неуправляемых (диоды) и управляемых (тиристоры, запираемые тиристоры, биполярные транзисторы с изолированным входом 7) Привести пример электропривода механизма без механического передаточного устройства. Насосы, вентиляторы, - без механического передаточного устройства. 8) Привести пример электропривода механизма с электрическим преобразовательным устройством. Подъёмная установка, тяговый ЭП. (преобразователь частоты) 9) Функции регулируемого электропривода. По каким координатам возможно регулирование в электроприводе? Функции регулируемого электропривода: 1. Установка требуемой скорости в пределах заданного диапазона; 2. Стабилизация установленного значения скорости с заданной точностью при возмущающих воздействиях (Например: изменение нагрузки на валу двигателя); 3. Регулирование момента, развиваемого двигателем в двигательном и тормозном режимах, и ускорения (замедления) привода; 4. Формирование требуемого характера изменения скорости во времени w = f(t) с заданной точностью. Регулирование в ЭП осуществляется по одному из главных контролируемых параметров: моменту, скорости или положению РО машины. Регулирование момента как основого рег. параметра характерно для тех производственных машин, где контролируется натяжение обрабатываемого материала (намоточные устройства, линии обработки ткани и др.) Регулирование скорости характерно для станков, клети прокатных станов, конвейеры, питатели, насосы и многие другие машины. 10) Классификация электроприводов. По числу РО приводимых в движение: - групповой (один ЭП приводит в движение несколько РО)- невозможно регулировать - индивидуальный (для каждого РО свой ЭП) - многодвигательный (На один РО несколько ЭП) По виду движения ЭП: - вращательное - поступательное (линейный ЭП) - вибрационное - многокоординатное По способу соединения двигателя с РО: - редукторный i > 1 – понижающий скорость i < 1 – повышающий скорость - без редукторный ЭП - конструктивно-интегрируемый ЭП (нельзя разделить двигатель и РО) По регулируемости: - не регулируемый - регулируемый (скорость, момент, путь) По виду управления: - ручное управление - полуавтоматическое управление - замкнутая система автоматического регулирования 11) Основные сведения из истории развития электропривода. Начало развития электропривода было положено созданием в первой половине XIX в. работоспособных образцов электрического двигателя. Первое практическое использование электродвигателя постоянного тока, оснащенного другими характерными элементами электропривода: механической передачей, органами управления и т. п. – и обеспечивавшего движение катера вверх по р. Неве, относят к 1834 – 1838 гг. и связывают с именем акад. Б.С. Якоби. Эта работа получила мировую известность, однако несовершенство технических средств и, главным образом, источника питания – гальванической батареи – не позволило блестящему изобретению Б.С. Якоби и работам его последователей найти широкое практическое применение. Лишь в 70-е годы XIX в. были разработаны практически применимые двигатели постоянного тока, демонстрировавшиеся на выставках в Вене, Париже, Мюнхене. Условия для развития массового электропривода создались в конце XIX в. благодаря открытию в 1886 г. Г. Феррарисом и Н. Тесла явления вращающегося магнитного поля, положившего начало созданию многофазных электродвигателей переменного тока, и, главным образом, благодаря комплексу выдающихся работ М.О. Доливо-Добровольского, который в 1888 г. предложил и реализовал трехфазную систему передачи электрической энергии переменного тока, и разработал в 1889 г. трехфазный асинхронный двигатель с распределенной обмоткой статора и с короткозамкнутым ротором в виде беличьего колеса. Конец XIX – начало XX вв. характеризуются строительством электрических станций и развитием электрических сетей. Централизованная выработка электроэнергии с ее последующим распределением послужила основой для создания промышленного, индивидуального и группового электропривода. Одновременно электрический привод вытеснял все виды механического привода. Так, мощность электродвигателей по отношению к общей мощности установленных двигателей в 1890 г. составляла 5 %, в 1927 г. – 75 %, к 1950 г. – около 100 %. В период интенсивного перехода к индивидуальному электроприводу, во всех новых производствах появилось большое количество различных типов электроприводов. Если в нерегулируемом электроприводе малой и средней мощности прочно заняли свое место и не уступили его до настоящего времени асинхронные двигатели с короткозамкнутым ротором, а в мощных электроприводах – синхронные двигатели, то регулируемые электроприводы были весьма разнообразны: широко использовались двигатели постоянного тока с различными схемами возбуждения (независимой, параллельной, последовательной, смешанной) при реостатном регулировании или при ослаблении магнитного поля, асинхронные двигатели с фазным ротором, коллекторные двигатели переменного тока, двигатели Бушеро и т. п. Наибольшее применение в регулируемых электроприводах средней и большой мощности в этот период и в дальнейшем нашла предложенная еще в конце XIX в. система Вард-Леонарда (генератор-двигатель), состоящая из нескольких электрических машин, но обладающая отличными регулировочными возможностями как в статике, так и в динамике. Идеи автоматического управления, зародившиеся задолго до создания работоспособного электропривода (идеи Уатта–Ползунова и др.), в 30-е годы начали интенсивно развиваться применительно к электроприводу. К началу 40-х годов электромеханическая часть индивидуального, в т. ч. многодвигательного электропривода, приобрела современные черты. Его характерной особенностью оставалось релейно-контакторное управление, хотя уже стали появляться системы непрерывного управления, основанные на применении замкнутых структур с использованием усилителей разных типов: машинных, электронно-ионных, несколько позже магнитных. В 1941 г. начала интенсивно развиваться военная электротехника, в частности специальные следящие электроприводы для управления орудийным огнем, радиолокации и т. п. Большую роль в создании новых, оригинальных специальных электроприводов сыграл завод № 627, преобразованный затем во ВНИИЭМ. В 1935 г. в ВЭИ разработана первая версия электропривода с преобразователем на тиратронах – прообраз широко распространенных сейчас регулируемых электроприводов по системе статический преобразователь-двигатель. С 1949 г. электроприводы с ртутными выпрямителями широко внедрялись в качестве главных приводов прокатных станов. К 1948–1950 гг. относится появление отечественных вентильных каскадов на прокатных станах с введением в цепь ротора главного асинхронного двигателя управляемого ртутного выпрямителя. В 40–50-е годы формируются научно-исследовательские и проектно-конструкторские организации, внесшие весомый вклад в развитие отечественного электропривода. Это ВЭИ (регулируемые электроприводы широкого применения), ГПИ «Тяжпромэлектропроект» (электрооборудование металлургических производств), Центральный научно-исследовательский институт технологии машиностроения – ЦНИИТмаш (электропривод станов холодной прокатки), трест «Электропривод», позднее ВНИИэлектропривод (электропривод текстильных агрегатов, бумагоделательных и полиграфических машин, скоростных лифтов, экскаваторов), ЭНИМС (электроприводы металлорежущих станков), ВНИИЭМ (прецизионные электроприводы) и другие организации. Практическая реализация электроприводов осуществлялась заводами «Электросила», ХЭМЗ, «Динамо», им. Я.М. Свердлова, им. С. Орджоникидзе и мн. др. В середине 50-х годов сформировалась теория и практика «дополупроводникового» электропривода. Были созданы и получили широкое признание учебники по электроприводу С.А. Ринкевича «Теория электропривода» (1938 г.), А.Т. Голована «Электропривод» (1948 г.), Д.П. Морозова «Основы электропривода» (1950 г.), В.К. Попова «Основы электропривода» (1951 г.) и многие другие. Особенно следует отметить учебник М.Г. Чиликина «Общий курс электропривода», вышедший в 1953 г., выдержавший шесть изданий и внесший благодаря высокому уровню и доступности изложения весомый вклад в подготовку специалистов в СССР. В США созданы основы современной теории электромеханического преобразования энергии на основе обобщенной машины, впоследствии широко использовавшиеся в практике разработки управляемого электропривода. В послевоенные годы в ведущих лабораториях мира произошел прорыв в области силовой электроники, кардинально изменивший многие сферы техники и, в частности, электропривод. В 1948 г. Дж. Бардин и В. Браттейн (Белловская лаборатория, США) создали первые транзисторы. В технику электропривода начали входить электронный управляемый ключ и, построенные на его основе, устройства. Радикальное воздействие на технику электропривода оказал тиристор – мощный полууправляемый ключ, созданный в 1955 г. усилиями Дж. Молла, М. Танненбаума, Дж. Голдея и Н. Голоньяка (США). Появление тиристоров на тысячи вольт и большие токи при малых падениях напряжения в проводящем состоянии позволило полностью отказаться от громоздких, ненадежных и неэкономичных ртутных выпрямителей и тиратронов и перейти на управляемые тиристорные выпрямители в цепях электроприводов постоянного тока. Работы Ф. Блашке (ФРГ), опубликованные в начале 70-х годов, положили начало созданию систем асинхронного электропривода с ориентацией по магнитному полю с так называемым векторным управлением (система трансвектор). В СССР получили развитие начатые еще в начале 40-х годов (А.А. Булгаков, М.П. Костенко) перспективные работы в области частотно-регулируемого электропривода. В трудах А.С. Сандлера и его учеников в 70-х годах нашли отражение вопросы построения преобразователей частоты с явно выраженным звеном постоянного тока на доступной в то время элементной базе – тиристорах, были сформулированы и детально исследованы принципы автоматического управления электропривода с преобразователями частоты. В 60–70-е годы в МЭИ под руководством М.Г. Чиликина проведены интенсивные исследования и разработки дискретного электропривода с шаговыми двигателями (Б.А. Ивоботенко), широко внедренные в металлургической, станкостроительной и других отраслях промышленности, получившие признание технической общественности и заложившие основы дальнейшего развития новых типов регулируемого электропривода. В этот же период развивается электропривод с вентильными двигателями, в которых коллектор заменяется группой полупроводниковых ключей, коммутирующих обмотки и управляемых в функции положения ротора. Наиболее плодотворной оказалась идея, предложенная еще в середине 50-х годов Кесслером (Германия) и состоящая в подчиненном регулировании координат электропривода с последовательной коррекцией. Во ВНИИЭлектроприводе в 60–70-е годы были созданы нашедшие широкое применение в промышленности комплексы средств управления электропривода — аналоговая ветвь УБСР-АИ и цифровая ветвь УБСР-ДИ. Создание в США на границе 60-70-х годов четырехразрядного однокристального микропроцессора INTEL 4004 и программируемого логического контроллера (ПЛК) PDP 14 ознаменовало новую эру в сфере управления электропривода. Уже в 70-е годы в мировой практике эти технические средства начали интенсивно вытеснять использовавшиеся ранее контактные и бесконтактные реле; к 80-м годам схему управления на восьми и более реле стало экономически целесообразно заменять ПЛК. По мере развития микропроцессорных средств управления и ПЛК изменялась информационная часть электропривода: резко, почти скачкообразно, наращивались функциональные возможности в управлении координатами, во взаимодействии нескольких систем между собой и с внешней средой, в детальной диагностике состояния и защите всех элементов привода от любых нежелательных воздействий. Концептуальные изменения в развитие электропривода внесла новая элементная база силового канала в массовых устройствах – полностью управляемые ключи на токи до 600 А, напряжение до 1200 В с частотами 30 кГц и выше, появившиеся на рынке в последние 10–15 лет, и средства управления ими. Эти приборы, объединенные в модули с встроенными быстрыми обратными диодами и управляемые указанными выше современными средствами, послужили основой для построения преобразователей частоты со структурой неуправляемый выпрямитель – L-С-фильтр – автономный инвертор с широтно-импульсной модуляцией (ШИМ), ставших основным техническим решением в регулируемом электроприводе переменного тока мощностью до 600 кВт. В последние годы на рынке появились IGBT-модули на токи до 3600 А и напряжения до 6500 В. Интенсивно осваиваются новые виды регулируемого электропривода – вентильно-индукторный, с другими нетрадиционными электрическими машинами. В микроприводе миниатюрных роботов применяются тонкопленочные диэлектрические двигатели. В последние годы в мире отчетливо сформировалось и интенсивно реализуется тенденция перехода от нерегулируемого электропривода к регулируемому в массовых применениях: насосы, вентиляторы, конвейеры и т. п., благодаря чему резко повышается технологический уровень оборудования, экономятся значительные энергетические ресурсы. 12) Какие электродвигатели являются самыми массовыми на сегодняшний день? На сегодняшний день, наиболее распространенным видом двигателя является – асинхронный электродвигатель. Суть которого, заключается в том, что частота вращения движущей части (ротора), значительно отличается от частоты окружающего его магнитного поля. 13) Какая самая массовая система регулируемого электропривода на сегодняшний день?
|