ЭКЗ.Эл.привод. 1 Понятие электропривода. Электропривод
 Скачать 2.16 Mb. Скачать 2.16 Mb.
|

|
14) Какие электродвигатели являлись самыми массовыми в регулируемом электроприводе до появления регулируемого электропривода переменного тока? Самыми массовыми до появления регулируемого электропривода переменного тока были регулируемые электродвигатели постоянного тока с различными схемами возбуждения: независимой, параллельной, последовательной или смешанной. 15) Изобразить типовые механические характеристики двигателя. 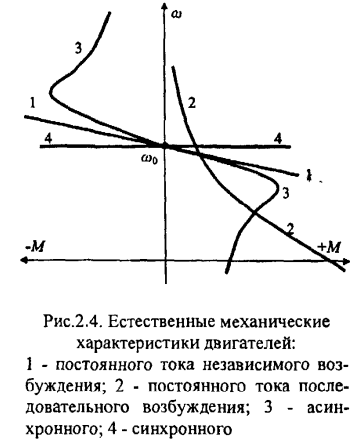 1) ДПТ-НВ –его мех. характеристика имеет высокую жесткость, постоянную во всех точках. 2) ДПТ-ПВ- его мех. характеристика не постоянна, она мала при малых нагрузках и повышается по мере возрастания момента. 3) АД- его мех. характеристика имеет две явно выраженные части: рабочую – с высокой постоянной отрицательной жесткостью и криволинейную часть с переменной положительной жесткостью; вторая часть характеристики используется только во время пуска двигателя 4) СД – он имеет абсолютно жесткую мех. характеристику, параллельную оси абсцисс. 16) Перечислите основные параметры механической характеристики двигателя и рабочего механизма. Параметры МХ: 1) Жесткость механической характеристики – отношение разности моментов к соответствующей разности угловых скоростей, определяющая вид мех. характеристики. Абсолютно жесткая – это характеристика, при которой скорость с изменением момента остается постоянной. Жесткая – характеристика, при которой незначительное изменение скорости вызывает значительное изменение момента. («шунговые» двигатели постоянного тока с параллельной обмоткой возбуждения). |B| > = 0 Мягкая – характеристика, при которой с изменением момента скорость изменяется значительно. (Двигатели постоянного тока с последовательной обмоткой возбуждения) |B| <0 Абсолютно мягкая — характеристика, при которой момент двигателя с изменением угловой скорости остается практически постоянным. Абсолютно мягкой характеристикой обладают двигатели постоянного тока независимого возбуждения при питании их от постороннего источника тока. 2) Линейность (ДПТ-НВ) – нелинейность (ДПТ-ПВ и АД) 3) Естественная и искусственная характеристики Ест – получена при номинальных параметрах двигателя и питания. Иск – получается, когда с целью регулирования изменяются параметры питающего напряжения или в цепи обмоток вводятся дополнительные элементы (активные или индуктивные сопротивления, полупроводниковые приборы и др.) 17) Графический способ определения жесткости механической характеристики. Если МХ прямолинейна, то её жесткость – величина постоянная и равная тангенсу угла наклона характеристики к оси ординат. Если характеристика криволинейна, то жесткость определяется тангенсом угла наклона касательной к МХ в данной точке (например т. А). 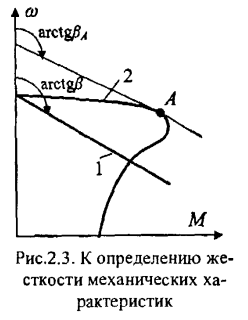 18) Изобразить типовые механические характеристики рабочего механизма. 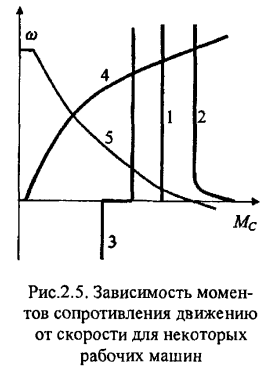 1 – машины с рабочим органом резания 2 – машины, где Мс определяется силами трения. (транспортеры, конвейеры) 3 – грузоподъёмные механизмы, где Мс движению создается силой тяжести 4 – для турбомеханизмов, где момент на валу, зависит от скорости. (центробежные и осевые насосы, вентиляторы и компрессоры) 5 – намоточные устройства и др. машины, для которых технологически необходима работа с постоянством мощности. 19) Основное отличие активного от реактивного момента сопротивления? Основное отличие заключается в том, что активный момент сопротивления может как препятствовать движению, так и создавать движение, а реактивный момент направлен против движения и всегда препятствует ему. (Активный момент сопротивления может быть отрицательным, если его направление противоположно знаку скорости вращения и положительным, если направление момента совпадает с направлением скорости вращения, а реактивный всегда отрицательный.) А также АМС и РМС, создаются разными силами. АМС – силами тяжести, а РМС – силами трения и упругости. 20) Назовите самый энергетически эффективный режим работы для опускания груза подъемной установкой. Режим рекуперативного генераторного торможения; в этом режиме кинетическая энергия, запасенная в движущихся элементах механической системы, или потенциальная энергия, отбираемая от рабочего органа (например, в режиме спуска груза), поступает на вал электродвигателя и преобразуется им, как генератором, в электрическую энергию, которая за вычетом потерь в электрической машине и преобразователе отдается в питающую сеть; в этом режиме электродвигатель работает как генератор параллельно с питающей сетью. Такой режим торможения энергетически является наиболее выгодным, т.к. энергия торможения используется полезно. 21) Условие перехода в двигательный режим работы электродвигателя. Скорость и момент должны иметь одно направление. 22) Условие перехода в тормозной режим работы электродвигателя. В тормозном режиме Р < О, поэтому тормозные моменты двигателя должны иметь знак, противоположный знаку скорости. 23) Перечислить квадранты механической характеристики, в которых возможен двигательный режим работы двигателя. Двигательный режим работы двигателя находится в первом и третьем квадранте МХ. 24) Перечислить квадранты механической характеристики, в которых возможен тормозной режим работы двигателя. Тормозной режим работы двигателя находится во втором и четвертом квадранте МХ. 25) Как определить режим работы двигателя по знаку момента и скорости? Если скорость и момент двигателя имеют один знак, то режим работы двигательный, а если знаки разные, то режим работы тормозной. 26) Сформулировать уравнение движения электропривода для вращательного движения. К вращательному движению может быть сформулирован закон: тело, имеющее фиксированную ось вращения, будет находиться в состоянии покоя или равномерного вращения, до тех пор, пока приложенные моменты не выведут его из этого состояния. т.е., если алгебраическая сумма моментов, прикладываемых к валу, равна нулю, то механическая система будет вращаться с постоянной скоростью ωуст (или будет в состоянии покоя), т.е. находиться в установившемся режиме. 27) Сформулировать уравнение движения электропривода для поступательного движения. Для поступательного движения условие установившегося режима формулируется как dV/dt = 0, если  , т.е. если сумма векторов сил, приложенных к механической системе, равна нулю, то система будет двигаться с постоянной установившейся скоростью Vут или находиться в состоянии покоя. , т.е. если сумма векторов сил, приложенных к механической системе, равна нулю, то система будет двигаться с постоянной установившейся скоростью Vут или находиться в состоянии покоя.28) Отличие уравнений движения электропривода для вращательного и поступательного движения. Отличие уравнений движения электропривода заключается в том, что для вращательного движения сумма моментов должна быть равна 0, а для поступательного сумма приложенных сил, чтобы механическая система вращалась или двигалась с постоянной скоростью или находилась в состоянии покоя. 29) Зачем необходимо приведение моментов и моментов инерции к валу электродвигателя? Для выбора и проверки двигателя (по перегрузочной способности, по нагреву) 30) Принципы приведения моментов и моментов инерции к валу электродвигателя. Принцип приведения моментов заключается в сохранении равенства мощностей на валу двигателя и на валу рабочего органа. Приведение моментов инерции к одной оси вращения производится на основании принципа сохранения кинетической энергии исходной многомассовой системы с распределенными моментами инерции и одномассовой системы с эквивалентным моментом инерции. 31) Чем больше коэффициент передачи редуктора, тем меньше приведенный момент инерции? Чем больше коэффициент передачи редуктора, тем меньше приведенный момент инерции.  32) Чем больше коэффициент передачи редуктора, тем меньше приведенный статический момент? Чем больше коэффициент передачи редуктора, тем меньше приведенный статический момент.  33) Как рассчитать время запуска электропривода с помощью уравнения движения?  Где tп – время запуска ЭП от w=0 до wдв; wдв – угловая скорость двигателя, соответствующая моменту Мс 34) Что характеризует величина разности момента двигателя и момента сопротивления в уравнении движения электропривода? Величина разности момента двигателя и момента сопротивления в уравнении движения электропривода характеризует работу двигателя, если разность > 0, то двигатель разгоняется, если разность < 0, то происходит торможение, если Разность = 0, то двигатель работает с установившейся скоростью. 35) Объяснить необходимость приведения моментов сопротивления к валу электродвигателя. СПРОСИТЬ 36) Объяснить необходимость приведения инерции механизма к валу электродвигателя. СПРОСИТЬ 37) Нужно ли приводить момент сопротивления к валу электродвигателя при отсутствии механического передаточного устройства? При отсутствии механического передаточного устройства, момент сопротивления не нужно приводить к валу электродвигателя т.к передача энергии от электродвигателя к насосу происходит без потерь. 38) Изобразить механические характеристики двигателя постоянного тока с независимого возбуждения в четырех квадрантах во всех режимах работы.  39) Условие перехода двигателя постоянного тока с независимого возбуждения в генераторный режим работы. Необходимо разогнать якорь рабочим органом выше скорости w0. Если w> w0, то εя > Uя, то Iя и М – меняют знак. Суть εдвиг > Uсети, то ток начинает протекать под воздействием εдвиг, а не Uсети 40) Способы возбуждения двигателя постоянного тока независимого возбуждения. Двигатели независимого возбуждения могут иметь электромагнитное возбуждение, (рис. а) и возбуждение от постоянных магнитов (рис. б)  41) Для двигателей постоянного тока, какой мощности применяется электромагнитное возбуждение от постоянных магнитов? Возбуждение от постоянных магнитов применяется для высокодинамичных двигателей мощностью до 20 кВт. 42) Как изменяется скорость идеального холостого хода и жесткость механической характеристики двигателя постоянного тока независимого возбуждения при увеличении добавочного сопротивления в цепи якоря в два раза? При увеличении в два раза добавочного сопротивления в цепь якоря, скорость холостого хода ω0 остается неизменной, а изменяется наклон механических характеристик в два раза, т.е. уменьшается их жесткость в два раза.  - жесткость - жесткость  - скорость идеального ХХ. - скорость идеального ХХ.43) Какие сопротивления могут входить в сопротивления якорной цепи? Rя - сопротивление якорной цепи, складывающееся из сопротивления обмотки якоря Rоя, обмотки дополнительных полюсов Rдп, Rщ – сопротивление щеток, компенсационной обмотки Rко (если она имеется) и внутреннего сопротивления источника питания двигателя Rп (если оно учитывается) Rя = Rоя + Rдп + Rко + Rп + Rщ Eя= КФw. К=pnN/2pia, где К – конструктивная постоянная двигателя, pn – число пар полюсов, N – число активных проводников обмотки якоря, а – число || ветвей обмотки якоря. 44) Возможно уменьшить сопротивление якоря двигателя постоянного тока независимого возбуждения меньше номинального значения? Можно, исключив Rдп и Rко. 45) Как изменяется скорость идеального холостого хода и жесткость механической характеристики двигателя постоянного тока независимого возбуждения при ослаблении магнитного потока возбуждения в два раза от номинального значения? При ослаблении магнитного потока возбуждения в два раза от номинального значения, скорость идеального холостого хода увеличивается в 2 раза, а жесткость уменьшается в 4 раза.   46) Целесообразно увеличение магнитного потока обмотки возбуждения двигателя постоянного тока независимого возбуждения выше номинального? Увеличение магнитного потока обмотки возбуждения двигателя постоянного тока независимого возбуждения выше номинального не целесообразно, т.к машина будет перегреваться. 47) Как изменяется скорость идеального холостого хода и жесткость механической характеристики двигателя постоянного тока независимого возбуждения при уменьшении напряжения питания якоря в два раза от номинального значения? При уменьшении напряжения питания якоря в два раза от номинального значения, скорость идеального холостого хода уменьшится в 2 раза, а жесткость останется неизменной. 48) К чему может привести увеличение напряжения питания якоря двигателя постоянного тока независимого возбуждения выше номинального? Повышение напряжения питания выше номинального не рекомендуется, т.к. это может ухудшить коммутацию на коллекторе. 49) Каким образом осуществляется двухзонное регулирование скорости двигателя постоянного тока независимого возбуждения? В двигателе постоянного тока независимого возбуждения двухзонное регулирование скорости осуществляется двумя способами – изменяя напряжение Uд или изменяя поток Ф. В первой зоне скорость двигателя в диапазоне от нуля до основной скорости ω0н регулируется изменением напряжения якоря при постоянном потоке возбуждения Фн. Во второй зоне регулирование производится изменением тока (потока) возбуждения при постоянном номинальном напряжении якоря. Соответственно номинальный момент в первой зоне регулирования остается постоянным, а во второй зоне снижается пропорционально уменьшению потока. Мя=КФвIя  50) Почему регулирование двигателя постоянного тока независимого возбуждения выше основной производится при постоянстве мощности, а ниже при постоянном моменте? 51) В каких режимах работы может работать двигатель постоянного тока независимого возбуждения в квадрантах механической характеристики? В квадрантах механической характеристики двигателя постоянного тока независимого возбуждения может работать в режимах: двигательном, генераторном, динамическом торможении, торможение противовключением. 52) Как перевести двигатель постоянного тока независимого возбуждения из двигательного в генераторный режим работы? Объяснить изменение направления электромагнитного момента и тока якоря. Чтобы перевести двигатель постоянного тока независимого возбуждения из двигательного в генераторный режим работы, необходимо разогнать якорь, рабочим органом выше скорости w0. Если w> w0, то εя > Uя, то Iя и М – меняют знак. , εя=КФw, Uя=КФw0, Iя=(Uя-εя)/Rя, Мя=КФвIя. Суть εдвиг > Uсети, то ток начинает протекать под воздействием εдвиг, а не Uсети 53) Условия перехода двигателя постоянного тока независимого возбуждения в режим противовключения. Изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (- U), в этих условиях электромагнитный момент станет отрицательным. 54) Условия перехода двигателя постоянного тока независимого возбуждения в режим электродинамического торможения. Условием перехода двигателя постоянного тока независимого возбуждения в режим электродинамического торможения является отключение двигателя от сети и замыкание на добавочное сопротивление, при этом обмотка возбуждения должна оставаться включенной в сеть. ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа, т.е. станет отрицательным. В результате электромагнитный момент также изменит направление и станет тормозящим. |