шпоры по электротехнике. ШПОРЫ по электре. 1 Реальные и идеальные источники эл энергии. Схемы замещения
 Скачать 1.36 Mb. Скачать 1.36 Mb.
|

27 Основные уравнения асинхронного двигателяНапряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора: В роторной обмотке аналогичное уравнение будет иметь вид: Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде: Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора: где 28 Вращающий момент асинхронного двигателяВращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины: где w1=2pn1/60 — угловая частота вращения поля. В свою очередь, n1=f160/Р, тогда Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим: Уравнение вращающего момента асинхронного двигателяОтсюда следует, что момент двигателя пропорционален электрическим потерям в роторе. Подставим в последнюю формулу значение тока I2’:  получим уравнение вращающего момента асинхронного двигателя: получим уравнение вращающего момента асинхронного двигателя:29. Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валуn = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1). 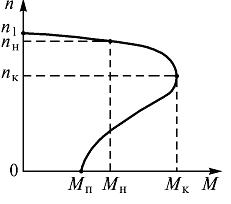 Рис. 1. Механическая характеристика асинхронного двигателя Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики. Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода. 30 Механическая характеристика и саморегулирование двигателя. График, связывающий между собой механические величины - скорость и вращающий момент, называется механической характеристикой асинхронного двигателя (рис.7) n = ƒ(M). Саморегулирование асинхронного двигателя заключается в следующем. Пусть двигатель работает устойчиво в каком-то режиме, развивая скорость n1 и вращающий момент М1. При равномерном вращении этот момент равен тормозному моменту Мт1, т.е. М1=Мт1, n1= сonset. Увеличение тормозного момента до М2, вызовет уменьшение оборотов машины, так как тормозной момент станет больше вращающего момента. С уменьшением оборотов увеличивается скольжение, что в свою очередь вызывает возрастание ЭДС и тока в роторе. Благодаря этому увеличивается вращающий момент двигателя. Этот процесс заканчивается тогда, когда вращающий момент М2, развиваемый двигателем, станет равным Мт2. При этом, устанавливается скорость вращения меньшая, чем n1. Свойство автоматического установления равновесия между тормозным и вращающим моментами называется саморегулированием.  На лабораторном стенде двигатель нагружается электротормозом, состоящим из электромагнита, в зазоре которого вращается диск, посаженный на вал двигателя. Изменяя ручкой автотрансформатора напряжение, питающее катушку электромагнита, можно менять тормозное усилие, момент которого равен: МТОРМ = F• r (Н·м) где F - усилие (сила), действующая на окружность шкива, (Н); r - радиус шкива, равен 0,18 м. П  олезная мощность на валу двигателя: олезная мощность на валу двигателя:( Вт), г  деn - скорость вращения двигателя, об/мин. деn - скорость вращения двигателя, об/мин.где ƒ - частота сети (равна 50 Гц), р - число пар полюсов обмотки статора (равно 2). n1 - синхронная скорость вращающего магнитного поля. Скорость вращения двигателя определяется с помощью тахометра. С  кольжение рассчитывают по формуле: кольжение рассчитывают по формуле:  s % 31 Рабочими характеристиками называют зависимости мощности, потребляемой двигателем , потребляемого тока I, коэффициента мощности , скорости вращения двигателя , к.п.д. и вращающего момента М от полезной мощности двигателя, отдаваемой на валу . Рабочие характеристики определяют основные эксплуатационные свойства асинхронного двигателя. Рабочие характеристики асинхронного двигателя средней мощности показаны на рис. 8.8. Их поведение объясняется следующим образом. При малых нагрузках потребляемый двигателем ток I (ток холостого хода) может составлять от 20 до 70 % номинального тока. При увеличении нагрузки возрастает ток в цепи ротора, что приводит к почти пропорциональному увеличению тока I в цепи статора.  Рис.8.8 Вращающий момент двигателя ( При дальнейшем увеличении величина будет несколько уменьшаться. Это объясняется увеличением скольжения s что вызывает повышение реактивного сопротивления обмотки ротора, а следовательно, и фазового сдвига .С увеличением увеличивается и , т.е. будет уменьшаться. Поведение рабочей характеристики объясняется следующим образом. Величина к.п.д.определяется отношением полезной мощности к мощности , потребляемой из сети. Величина пропорциональны квадрату протекающего тока и, следовательно, зависят от нагрузки. При холостом ходе, как и в трансформаторе, преобладают потери в стали, поскольку , а равен току холостого хода , который невелик. При небольших нагрузках на валу потери в меди все же остаются небольшими, и поэтому к.п.д., определяемый формулой с увеличением сначала резко возрастает. Когда постоянные потери Характер зависимости ) может быть объяснен из соотношения . Если бы к.п.д. был постоянен, то между и была бы линейная зависимость. Но поскольку к.п.д. зависит от и эта зависимость вначале резко возрастает, а при дальнейшем увеличении нагрузки изменяется незначительно, то и кривая ) сначала растет медленно, а затем резко возрастает. 32 В любой электрической цепи сумма мощностей всех источников электрической энергии должна быть равна сумме мощностей всех приемников и вспомогательных элементов. Получив ранее выражения мощностей можно записать в общем виде уравнение баланса мощности для любой электрической цепи: (1.35) ΣE→ I→ + ΣU← I→ = ΣE← I→ + ΣU→ I→ + ΣI2r. Уравнение (1.35) может быть написано как для действительных направлений ЭДС, напряжений и токов, так и для случая, когда некоторые из них являются произвольно выбранными положительными направлениями. В первом случае все члены в нем будут положительными и соответствующие элементы цепи будут в действительности источниками или приемниками электрической энергии. Если же некоторые члены записаны с учетом произвольно выбранных положительных направлений, соответствующие элементы нужно рассматривать как предполагаемые источники и приемники. В результате расчета или анализа какие-то из них могут оказаться отрицательными. Это будет означать, что какой-то из предполагаемых источников является на самом деле приемником, а какой-то из предполагаемых приемников — источником. 33 Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины. При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент. Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.  Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора. Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 - 7) Iном и более. Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов. Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным ротором sкр = (R2' + Rд') / (Х1 + Х2') = 1, где Rд' — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора. Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 - 0,4) Mном, нормальным, если Мп — (0,5 - 0,75) Мном, и тяжелым при Мп ≥ Мном. Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.  Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным ротором. Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой. Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 - 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc. Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 - 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой. 34 Частотное регулирование. Этот способ регулирования частоты вращения позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения, либо преобразователи частоты — электромашинные или статические, выполненные на управляемых полупроводниковых вентилях (тиристорах). В настоящее время преобразователи частоты имеют довольно сложную схему и сравнительно высокую стоимость. Однако быстрое развитие силовой полупроводниковой техники позволяет надеяться на дальнейшее совершенствование преобразователей частоты, что открывает перспективы для широкого применения частотного регулирования. Подробное описание законов управления при частотном регулировании и анализ работы асинхронного двигателя при питании от преобразователя частоты даны в § 4.13 и 4.14. Регулирование путем изменения числа полюсов. Такое регулирование позволяет получить ступенчатое изменение частоты вращения. На рис. 4.35 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в два раза. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. Из рисунка видно, что при включении катушек 1-2 и 3-4 в две параллельные ветви число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля увеличивается в два раза. При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но, так как частота вращения возрастает в два раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора, последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переключении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными. Регулирование путем включения реостата в цепь ротора. При включении в цепь ротора добавочных активных сопро-тивлений Rдоб1 , Rдоб2 , Rдоб3 и других изменяется форма зависимости М = f(s) и механической характеристики n2= f(M) двигателя (рис. 4.37, а). При этом некоторому нагрузочному моменту Мн соответствуют скольжения s1, s2, s3 , ..., большие, чем скольжения se , при работе двигателя на естественной характеристике (при Rдоб = 0). Следовательно, установившаяся частота вращения двигателя уменьшается от nе до п1 п2, п3,... (рис. 4.37,б). Этот метод регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются: а) большие потери энергии в регулировочном реостате; б) чрезмерно «мягкая» механическая характеристика двигателя при большом сопротивлении в цепи ротора. В некоторых случаях последнее является недопустимым, так как небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения. 35 Асинхронный генератор — это работающая в генераторном режиме асинхронная электрическая машина (ел. двигатель). При помощи приводного двигателя (в нашем случае ватродвигателя) ротор асинхронного электрогенератора вращается в одном направлении с магнитным полем. Скольжение ротора при этом становится отрицательным, на валу асинхронной машины появляется тормозящий момент, и генератор передает энергию в сеть. Для возбуждения электродвижущей силы в его выходной цепи используют остаточную намагниченность ротора. Для этого применяются конденсаторы. Асинхронные генераторы не восприимчивы к коротким замыканиям. Асинхронный генератор устроен проще синхронного (например автомобильного генератора): если у последнего на роторе помещаются катушки индуктивности, то ротор асинхронного генератора похож на обычный маховик. Такой генератор лучше защищен от попадания грязи и влаги, более устойчив к короткому замыканию и перегрузкам, а выходное напряжение асинхронного электрогенератора отличается меньшей степенью нелинейных искажений. Это позволяет использовать асинхронные генераторы не только для питания промышленных устройств, которые не критичны к форме входного напряжения, но подключать электронную технику. Именно асинхронный электрогенератор является идеальным источником тока для приборов, имеющих активную (омическую) нагрузку: электронагревателей, сварочных преобразователей, ламп накаливания, электронных устройств, компьютерную и радиотехнику. Преимущества асинхронного генератора. К таким преимуществам относят низкий клирфактор (коэффициент гармоник), характеризующий количественное наличие в выходном напряжении генератора высших гармоник. Высшие гармоники вызывают неравномерность вращения и бесполезный нагрев электромоторов. У синхронных генераторов может наблюдаться величина клирфактора до 15%, а клирфактор асинхронного электрогенератора не превышает 2%. Таким образом, асинхронный электрогенератор вырабатывает практически только полезную энергию. Еще одним преимуществом асинхронного электрогенератора является то, что в нем полностью отсутствуют вращающиеся обмотки и электронные детали, которые чувствительны к внешним воздействиям и довольно часто подвержены повреждениям. Поэтому асинхронный генератор мало подвержен износу и может служить очень долго. На выходе наших генераторов идет сразу 220/380В переменного тока, который можно использовать напрямую к бытовым приборам (например обогреватели), для зарядки аккумуляторов, для подключения к пилораме, а также для параллельной работы с традиционной сетью. В этом случае Вы будете оплачивать разницу потребленной из сети и сгенерированной ветряком. Т.к. напряжение идет сразу промышленных параметров, то Вам не понадобятся различные преобразователи (инверторы) при прямом включении ветрогенератора к Вашей нагрузке. Например Вы можете напрямую подключить к пилораме и при наличии ветра - работать так, как если бы Вы просто подключились к сети 380В. Как известно, для сокращения времени торможения при остановке производственных машин и механизмов часто применяются механические тормоза. Сокращение времени торможения, особенно в случае непродолжительного цикла работы, приводит к существенному повышению производительности машин и механизмов. Недостатками механических тормозов являются быстрый износ трущихся поверхностей, сложность и необходимость периодического регулирования тормозящего усилия, необходимость дополнительного места для размещения тормоза и его соединения с механизмом. Все перечисленные недостатки устраняются, если для указанных целей вместо механического тормоза использовать свойства электродвигателей работать в тормозных режимах, т. е. работать по существу в качестве генератора и развивать не вращающий, а тормозной момент. Во многих подъемно-транспортных машинах (кранах, лифтах, эскалаторах и т. д.), где возможно движение под действием сил тяжести, с помощью тормозного момента электродвигателя обеспечивается постоянная, установившаяся скорость опускания грузов. Электродвигатели постоянного тока могут работать в трех тормозных режимах: - в режиме противовключения; - в генераторном режиме с отдачей энергии в сеть; - в режиме динамического торможения. В любом из тормозных режимов электродвигатель работает как генератор, преобразует, например, кинетическую энергию движущихся частей либо потенциальную энергию опускающегося груза в электрическую энергию. 36При реверсировании двигателя на ходу путем переключения рубильника вначале происходит торможение от данной скорости до нулевой, а затем разгон в другом направлении. Такое торможение может быть использовано также для торможения при так называемом противовключении.При таком реверсировании или торможении у асинхронного двигателя с короткозамкнутым ротором имеют место значительные токи. Поэтому исходя из условий нагрева для этих двигателей допустимо число реверсирований в час не более десятков. Для ограничения токов и увеличения вращающих моментов в цепь фазного ротора асинхронного двигателя вводят сопротивление. Рассмотрим три основных способа электрического торможения асинхронных двигателей. Торможение по способу противовключения,как было указано, производится при переключении двигателя на ходу. Магнитное поле при этом вращается в другую сторону относительно направления вращения двигателя, и вращающий момент двигателя является тормозным — действует против направления вращения. Генераторное торможениеимеет место при переключении многоскоростного двигателя на ходу с большей скорости на меньшую, т.е. при переключении машины с меньшего числа полюсов на большее. В первый момент переключения скорость двигателя оказывается намного больше скорости его поля, т.е., скольжение получается отрицательным и машина переходит в режим работы генератором. Торможение происходит с превращением кинетической энергии вращающихся частей в электрическую энергию, которая за вычетом потерь в машине отдается в сеть. Генераторное торможение может быть также в подъемнике при спуске тяжелого груза, разгоняющего двигатель до скорости, превышающей синхронную; тогда машина начинает отдавать в сеть энергию, сообщаемою ей опускающимся грузом. Торможение в режиме работы генератором возможно только при сверхсинхронной скорости. Если двигатель в конце торможения должен быть остановлен, то к концу торможении следует перейти на механическое торможение или на другой вид электрического (динамическое, противовключение). Фиксации положения в конце при необходимости производится только с помощью механического тормоза. При динамическом торможенииобмотка статора двигателя отключается от трехфазной сети и включается в сеть постоянного или однофазного переменного токи. При этом возможны различные способы соединения фаз обмотки статора. Обмотка статора, питаемая постоянным током, создает неподвижное магнитное поле. Аналогично тому, как при нормальной работе двигателя его вращающееся поле увлекает за собой ротор, неподвижное поле при динамическом торможении заставляет ротор быстро останавливаться. Кинетическая энергия вращающихся частей переходит в теплоту, выделяющуюся в цепи ротора за счет токов, индуктированных в ней неподвижным полем статора. Плавность торможения обеспечивается регулированием напряжения на зажимах статора, Тормозной момент двигателя с фазным ротором может регулироваться также реостатом в цепи ротора. Недостатком динамического торможения является необходимость наличия источника постоянного тока с низким напряжением. 37 Синхронная машина — это электрическая машина переменного тока, частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре. Основными частями синхронной машины являются якорь и индуктор. Наиболее частым исполнением является такое, при котором якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор. Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора. Индуктор состоит из полюсов - электромагнитов постоянного то ка или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, незаполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса. Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную конструкцию из электротехнической стали (то есть набранную из отдельных листов). Электротехническая сталь обладает рядом интересных свойств. В том числе она имеет повышенное содержание кремния, чтобы повысить её электрическое сопротивление и уменьшить тем самым вихревые токи. |