шпоры по электротехнике. ШПОРЫ по электре. 1 Реальные и идеальные источники эл энергии. Схемы замещения
 Скачать 1.36 Mb. Скачать 1.36 Mb.
|

Принцип действияКак всякая электрическая машина синхронная машина может работать в режимах двигателя и генератора. В зависимости от положения основной массы ротора (М) он может быть межопорным, если существенная часть массы расположена между опорами (рис. 1., а); консольным, если она находится за одной из крайних опор (рис. 1.); двухконсольным при расположении существенной части массы за двумя крайними опорами. Возможны и смешанные варианты расположения основной массы. 38 Известно, что синхронный двигатель не способен запуститься самостоятельно даже при полном отсутствии нагрузки на валу. Причина состоит в том, что направление вращающего момента двигателя в любой случайный момент времени зависит от взаимной направленности векторов напряженности электромагнитных полей ротора и статора. Поскольку статор синхронного двигателя создает вращающееся поле, а магнитное поле ротора создается постоянным током и неподвижно, то и вектор электромагнитного момента двигателя непрерывно меняет свое направление на противоположное. Происходит это с частотой изменения напряжения сети, равной в наиболее общем случае 50 герцам. Разумеется, что ротор при этом не может прийти во вращение, так как для разгона ему требуется как минимум несколько секунд. Развить какую-то полезную мощность на рабочем валу синхронный двигатель может только тогда, когда ротор уже вращается со скоростью, сколько-нибудь близкой к синхронной. Поэтому для запуска синхронный привод необходимо каким-то образом разогнать, а лишь затем подать напряжение на обмотку постоянного тока ротора и на статорную обмотку. При этом магнитное поле роторной обмотки начинает взаимодействовать с полем статора, и двигатель втягивается в «синхронизм». Подачу постоянного напряжения на роторную обмотку можно обеспечить при помощи аккумуляторной батареи или генератора, устанавливаемого на вал двигателя. Проблема предварительного разгона ротора долгое время решалась только при помощи дополнительной электрической машины – разгонного асинхронного двигателя, включавшегося только на время пуска привода. Но более популярным на сегодняшний день является пуск синхронного двигателя с помощью дополнительной короткозамкнутой обмотки ротора. При этом синхронный двигатель запускается как асинхронный. Пусковая обмотка синхронного двигателя часто выполняется из латуни, а не из меди, чтобы снизить потребляемый двигателем ток при асинхронном пуске. На время асинхронного пуска синхронного привода роторная обмотка постоянного тока двигателя должна быть замкнута на активное сопротивление, превышающее собственное сопротивление обмотки в 8-12 раз. Это требование связано с тем, что при пуске в этой обмотке наводится повышенная ЭДС, которая может вызвать пробой изоляции витков, не будучи разряженной. Иногда из этих же соображений роторную обмотку синхронного двигателя на время пуска замыкают на якорь генератора, если расчеты подтверждают способность последнего выдержать повышенную пусковую нагрузку. В любом случае запуск синхронного привода является технически сложной задачей. Требуется установка дополнительных электрических машин и монтаж электрооборудования, контролирующего и согласовывающего подачу напряжения на обмотки приводного двигателя. Из-за осложненного пуска сфера применения синхронных приводов очень ограничена. Обыкновенно синхронные двигатели применяются в мощных электромеханических установках, длительно работающих при постоянной нагрузке без остановов и пусков. Это может быть, например, привод электромашинного преобразовательного агрегата, привод мощной насосной или вентиляционной установки. Несомненным достоинством синхронного двигателя в таких приводах является возможность регулирования коэффициента мощности для обеспечения высоких энергетических показателей. Наиболее простыми решениями смягчения пусковой характеристики являются:1)- пуск с переключением обмоток двигателя со схемы «звезда» на схему «треугольник»;2) включение резисторов в цепь статора при пуске;3) использование автотрансформатора;4) широко используются пусковые схемы с включением в роторную цепь двигателя пусковых сопротивлений, при этом достигается ограничение пускового тока с сохранением величины пускового момента; однако такие схемы применимы только для двигателей с фазным ротором. 39 Прежде чем приступить к рассмотрению особенностей механической характеристики различных типов двигателей, обратимся к ранее рассмотренным уравнениям, общим для всех типов электродвигателей. Во-первых, это выражение для определения ЭДС E, наводимой в обмотке якоря (10). Поскольку эта ЭДС имеет направление, встречное по отношению к приложенному к зажимам двигателя напряжению U, то ее называют противо-ЭДС: E = cenФ. Во-вторых, уравнение напряжений двигателя (5) U = E+I·Rя И наконец, выражение для электромагнитного момента двигателя (13) M = cмIяФ. Эти уравнения позволяют провести анализ наиболее значимых характеристик и особенностей работы двигателей. КПД синхронного генератора определяется как отношение полезной отдаваемой мощностиP2 к подводимой P1: где ΣΔp - сумма потерь в генератор, к которым относятся: механические потери (с учетом потерь на вентиляцию), электрические потери в обмотках статора и возбуждения, потери в блоке самовозбуждения или в возбудителе, если он находится на одном валу с генератором, добавочные потери. 40 Для синхронного двигателя можно написать такие же по виду выражения мощностей, как и для синхронного генератора. Однако применительно к двигателю они будут иметь иные значения. У двигателя Pφ = 3UI cos φ представляет собой мощность, потребляемую им из трехфазной сети. Вычитая из этой мощности потери мощности в обмотке якоря, получаем электромагнитную мощность, т. е. мощность, преобразуемую из электрической в механическую, развиваемую вращающимся ротором: Pэм = Pψ - ΔРя = 3UI cos φ - 3I2r =3E0I cos ψ. Электромагнитный момент синхронного двигателя может быть выражен через мощность Рэм и угловую скорость ω = πn/30 ротора: М = Рэм/ω. Заменив мощность Рэм ее выражением, получим (11,13)
Если из точки А векторной диаграммы (рис. 11.9, а) опустить перпендикуляр АГ на линию ОВ, то можно получить следующее равенство: I cos ψ = U sin θ/xc . Заменив I cos ψ в (11.13) его выражением, получим (11,14)
Как видно, при постоянных значениях U, Е, ω и хс момент двигателя прямо пропорционален sin θ. Зависимость М (θ) называется угловой характеристикой синхронного двигателя и приведена на рис. 11.10 в первом квадранте. В пределах от θ = 0 до θ = 90° расположена устойчивая часть характеристики, называемая так потому, что именно здесь возможна устойчивая работа двигателя с различными моментами сопротивления. Любое изменение момента сопротивления Мс при работе на устойчивой части характеристики приводит к такому изменению момента двигателя М, при котором неизбежно наступает равенство моментов М и Мс . На устойчивой части характеристики расположена точка А, соответствующая номинальному режиму работы. При номинальном режиме θном = 20 ÷ 30°. Максимальный момент, который в состоянии развивать двигатель, наступает при θ = 90°:
Если момент сопротивления Мс окажется больше момента Мmax, то двигатель не в состоянии будет его уравновесить и остановится. Отношение Мmax/Мном называется перегрузочной способностью двигателя и для различных двигателей лежит в пределах 2 — 3,2. Перегрузочная способность может быть при необходимости увеличена за счет повышения ЭДС Е0. Из выражения максимального момента следует, что последний и, следовательно, перегрузочная способность синхронного двигателя пропорциональны первой степени напряжения в отличие от асинхронного двигателя, у которого она пропорциональна квадрату напряжения. Из этого следует, что синхронные двигатели менее чувствительны к изменению напряжения, чем асинхронные. Следует обратить внимание на то, что длительная нагрузка двигателей, превышающая номинальную, недопустима, так как двигатель при этом будет перегреваться. Возможная кратковременная перегрузка должна быть учтена при выборе двигателя по мощности.
Рассмотрим явления, происходящие при изменении нагрузки двигателя. Допустим, что двигатель работает с моментом М = Мс и углом θ (см. рис. 11.10), чему соответствует векторная диаграмма, изображенная на рис. 11.9, а. В результате изменения момента сопротивления, например, от Мс до Мс > Мс происходит кратковременное снижение частоты вращения ротора, что сопровождается соответствующим изменением частоты индуктированной ЭДС Е0 и, следовательно, частоты вращения вектора ЭДС Е0 на векторной диаграмме. В результате этого возрастает угол сдвига фаз θ ЭДС Е0 относительно напряжения U и как следствие увеличиваются ток I, падение напряжения Iхc , момент Ми мощности Рφ и Рэм . Перечисленные величины возрастают до тех пор, пока при некотором угле θ1 (см. рис 11.9, б и 11.10) момент двигателя М1 не сравняется с моментом сопротивленияМс1. При М1 = Мс1 частота вращения ротора снова станет равной частоте вращения поля якоря: n = n0 = 60f/р. При уменьшении момента сопротивления угол θ и, следовательно, значения I, Iхc , М, Pφ и Рэм также уменьшаются, а при θ = 0 все они, кроме I и Iхс , оказываются равными нулю. Векторная диаграмма для случая θ = 0 дана на рис. 11.9, в Как видно, при θ = 0 двигатель потребляет чисто индуктивный ток. Нетрудно установить, что если бы двигатель был возбужден до ЭДС E0 = U, то при θ = 0 токI был бы равен нулю. Так как при изменении нагрузки двигателя происходит лишь относительно небольшое смещение ротора относительно вращающегося поля (изменение угла θ), то механическая характеристика синхронного двигателя представляется линией, параллельной оси абсцисс (рис. 11.11). Двигатель имеет постоянную частоту вращения при изменении момента вплоть до максимального значения. Синхронные двигатели могут работать кроме двигательного режима в тормозном генераторном режиме с отдачей энергии в сеть. Генераторный режим возникает в том случае, если к валу двигателя приложить не тормозящий, а вращающий момент. Двигатель в генераторном режиме представляет собой по существу генератор, работающий параллельно с сетью. Угловая и механическая характеристики двигателя в генераторном режиме приведены соответственно на рис. 11.10 и 11.11 в третьем и втором квадрантах. 41 V-образные характеристики-зависимость тока статора от тока возбуждения ротора при постоянной активной мощности. Показывают возможность регулирования реактивной мощности. 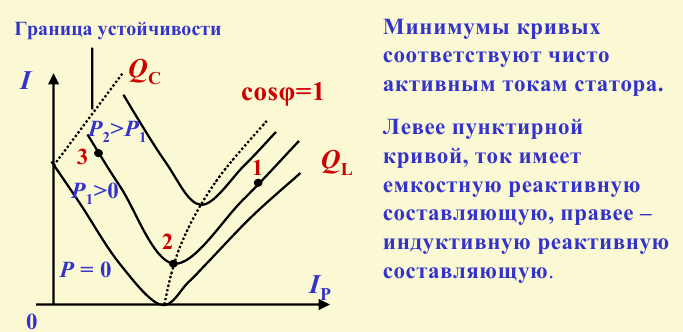 42 Машина постоянного тока — электрическая машина, предназначенная для преобразования механической энергии в электрическую постоянного тока (генератор) или для обратного преобразования (двигатель). Машина постоянного тока обратима. Машина постоянного тока образуется из синхронной обращённой конструкции, если её якорь снабдить коллектором, который в генераторном режиме играет роль выпрямителя, а в двигательном — преобразователя частоты. Благодаря наличию коллектора по обмотке якоря проходит переменный ток, а во внешней цепи, связанной с якорем, — постоянный. Якорь состоит из сердечника магнитопровода, обмотки 5, вала 6 и конструктивных деталей для их крепления. Сердечник якоря представляет собой стальной цилиндр, набранный из штампованных листов 1 (рисунок 1.7) электротехнической стали толщиной 0,5 мм, которые изолируются друг от друга лаком для уменьшения потерь от вихревых токов. 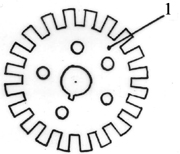 Рисунок 1.7 В листах штампуются пазы для размещения в них обмотки якоря и отверстия для насаживания сердечника на вал якоря, для стяжных шпилек и осевой вентиляции. Пакет железа якоря крепится на валу шпонкой, а с торцов стягивается нажимными кольцами. В больших машинах якорь состоит из нескольких пакетов штампованных листов, между которыми делаются промежутки для лучшего охлаждения машины (радиальная вентиляция). Часть сердечника якоря, занятая пазами, называется зубцовой зоной. Обмотка якоря выполняется из изолированного провода круглого или прямоугольного сечения. Она состоит из отдельных элементов – секций (рисунок 1.8), образованных из одного или нескольких витков. 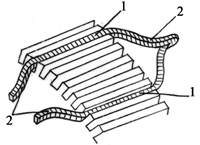 Рисунок 1.8 Секции изготавливаются по шаблонам. Часть секции 1, заложенная в пазы сердечника якоря, называется пазовой или активной частью. Часть секции 2, расположенная вне сердечника – в воздухе и соединяющая активные части, называется лобовой частью (лобовые соединения). Концы секций припаиваются к коллекторным пластинам. Для крепления секций в пазах применяются деревянные, гетинаксовые или текстолитовые клинья. Кроме витковой изоляции обмотка имеет пазовую изоляцию от сердечника. Лобовые части закрепляются с помощью проволочного бандажа. Электроизоляционные материалы, применяемые для изоляции обмоток, по степени термостойкости делятся на классы, которые допускают определенную температуру нагрева. В машинах постоянного тока применяются в основном классы А, В, С и Н. Коллектор (рисунок 1.9) набирается из медных пластин I, изолированных друг от друга и от вала, на котором он крепится, с помощью миканитовых прокладок 8 и манжет 5,7. Состороны, обращенной к валу, пластины имеют форму ласточкиного хвоста 2. В два конусообразных углубления коллектора вставляются изолированные нажимные конусы 3,4, которые стягивают коллекторные пластины в осевом направлении. В собранном виде коллектор спрессовывают в горячем состоянии, после чего обтачивают для придания ему строго цилиндрической формы. |