Ответы на билеты по геодезии (2 курс). 1. Техническая последовательность работ при тахеометрической съемке
 Скачать 2.04 Mb. Скачать 2.04 Mb.
|

|
39.Автоматизация измерений при тахеометрической съемке. Электронный тахеометр Leica Builder 509. С появлением электронных тахеометров стала возможна частичная или полная автоматизация тахеометрической съемки. При съемке электронный тахеометр устанавливается на съемочных точках, а на пикетных точках устанавливаются специальные вешки с отражателями, входящими в комплект тахеометра. При ведении на отражатели в автоматическом режиме определяются горизонтальные и вертикальные углы, а также расстояние до смежных съемочных и пикетных точек. С помощью микроЭВМ тахеометра производят обработку результатов измерений и в итоге получают приращения Δx и Δу координат и превышения h на смежные съемочные и пикетные точки. При этом автоматически учитываются все правки в измеряемые расстояния и за наклон вертикальной оси прибора в измеряемые углы. Результаты измерений могут быть введены в специальное запоминающее устройство (накопитель информации) или переписаны на магнитную кассету. В дальнейшем из накопителя или с магнитной кассеты информация поступает в ЭВМ, которая по специальной программе производит окончательную обработку результатов измерений, включающую в себя вычисление координат съемочных и пикетных точек, уравнивание съемочного хода и другие вычисления, необходимые для графического построения топографического плана или цифровой модели местности. Графическое построение топографического плана осуществляется графопостроителем, соединенным с ЭВМ. LeicaBuilder 509. Тахеометр серии Leica Builder – это специализированный тахеометр для строительных работ с интуитивно понятным программным обеспечением, который позволяет выполнить все измерения на строительной площадке независимо от уровня подготовки специалиста. Великолепная эргономика, простота эксплуатации, интуитивно понятный интерфейс позволяют начать работу с прибором даже неопытному пользователю. В распоряжении оператора полнофункциональная клавиатура, лазерный целеуказатель, плавный механизм наведения с бесконечными винтами и замечательная фирменная оптика Leica с 30-тикратным увеличением, гарантирующая получение четкого и контрастного изображения при любых условиях освещенности. Двухосевой компенсатор обеспечивает автоматическое устранение колебаний уровня в диапазоне до 4‘, что немаловажно при работе на строительной площадке, где могут иметь место сильные вибрации, вызванные строительной техникой. Лазерный центрир облегчает установку прибора на точке, а целеуказатель поможет быстро и точно навестись на точку при работе в безотражательном режиме. Возможность записи данных на USB карту памяти позволяет скачивать полевые данные без использования специальных кабелей и программного обеспечения. А также ускорит процесс работы, т.к. для передачи данных на ПК сам тахеометр уже не нужен и Вы сможете продолжать работу на строительной площадке. Встроенное программное обеспечение тахеометра Leica Builder включает в себя весь набор необходимых прикладных программ, позволяющих решить большинство строительных задач: 1)Разметка линий Колонны, опалубка, теплицы, ограждения, конструкции или террасы. Builder использует опорные линии или дуги в качестве ориентировки. 2)Исполнительная съемка-Плотники, архитекторы, монтажники, строители, специалисты по ландшафтному планированию и фасадным работам – все они используют Builder для быстрого и точного сбора исполнительных данных. 3)Передача высот-Передача базовых высот, определение параметров линий, маркировка высот этажей, контроль удаленных работ. 4)Профилирование-Установка профилей, передача смещений в/из профилей или просто сохранение всех данных профиля в приборе. 5)Объемы-Какой объем вы перевезли сегодня? Обрезка для формовки, массовые перевозки, выработки/засыпки, контроль запасов, мониторинг отвалов. 6)Площади-Сколько нужно материала для покрытия крыши? Сколько необходимо асфальта для покрытия площадки? Поместится это окно в раму. Builder дает ответ. 7)Контроль - Стоит ли конструкция вертикально? Достаточный ли зазор между краном и крышей? 40.Понятие об определении координат пунктов навигационными спутниковыми системами. Системы ГЛОНАСС и GPS. Наиболее перспективными системами решения геодезических задач являются системы Глонасс (РФ) и GPS(США) и Галилео (Европа). Эти системы разработаны Министерствами Обороны. В 1995 г. Правительство РФ постановлением 237 открыло ГЛОНАСС для ком. Испытаний. Современные спутниковые системы состоят из 3-х частей: Космический сектор: включает в себя набор спутников, которые называются созвездия. Сектор управления и контроля: состоит из центральной станции и нескольких станций слежения, расположенных в разных точках Земного шара. Сектор пользования Все спутники оборудованы двигателями, которые позволяют корректировать орбиту. На территории РФ станции управления и контроля размещены в: Москве, Санкт-Перетербурге, Воркуте, Енисейск, Якутск, Уссурийск. Спутниковая аппаратура состоит из ряда аксессуаров. В комплект 1-го спутникового приемника входят: Антенна Приемник Контроллер Доп. Оборудование (аккумуляторы, кабели, штатив и т.п.) В настоящее время спутники выпускают около 400 фирм. Основные источники ошибок спутниковых наблюдений: Ошибки исходных данных (координат самих спутников) Отражение радиоволн Геометрический фактор (от геометрии расположения спутников) Способы и режимы наблюдений. Способы делят на: 1)абсолютный – определение координат 2)относительный – приращение и другие вычисления Режимы наблюдений: 1)статика 2)кинематика Планирование наблюдений. Цель: определение оптического интервала времени при построении геодезических сетей. 41. Теодолиты, применяемые для построения геодезических сетей сгущения. Для угловых измерений в геодезических сетях сгущения применяют точные оптические теодолиты, к которым относят модели типа Т2, Т5, Т5К и новые унифицированные модели типа 2Т5, 2Т5К. Унифицированные модели имеют одинаково расположенные детали управления, что создает преимущества при работе с ними. Наводящие и закрепительные устройства алидады и зрительной трубы соосны и снабжены механизмами закрепления куркового типа. Для предварительного наведения на визирные цели зрительные трубы с двух сторон имеют коллиматорные визиры. Для приведения горизонтальной оси теодолита в положение, перпендикулярное к вертикальной оси, в правых (относительно положения КЛ) колонках установлены эксцентриковые лагеры. 42. Поверки и основные исследования теодолитов. Теодолит как прибор для измерения углов должен удовлетворять некоторым геометрическим условиям, вытекающим из общего принципа измерения горизонтального угла. Рассмотрим эти условия:  Рис.4.5 Ось цилиндрического уровня при алидаде горизонтального круга должна быть перпендикулярна к оси вращения алидады. Ось вращения алидады должна быть установлена отвесно (вертикально). Визирная ось трубы должна быть перпендикулярна к оси вращения трубы. Ось вращения трубы должна быть перпендикулярна к оси вращения алидады. Вертикальная нить сетки нитей должна лежать в коллимационной плоскости. Для всех этих условий, кроме второго, обязательно выполняются поверки для того, чтобы выяснить удовлетворяет ли конкретный теодолит перечисленным условиям. Если при выполнении поверок обнаруживается, что какое-либо условие не выполняется, производят исправление теодолита. Поверка первого условия была рассмотрена в разделе 3.3; следует лишь подчеркнуть, что исправление угла между осью уровня и осью вращения алидады производится исправительными винтами уровня. Установка оси вращения алидады в вертикальное положение выполняется в следующем порядке: вращая алидаду, устанавливают уровень параллельно линии, соединяющей два подъемных винта и приводят пузырек уровня в нульпункт, действуя этими двумя винтами, вращают алидаду на 90o, то-есть, устанавливают уровень по направлению третьего подъемного винта, и, действуя этим винтом, приводят пузырек уровня в нульпункт. После этого вращают алидаду и устанавливают ее в произвольное положение; пузырек уровня должен оставаться в нульпункте. Если пузырек уровня отклоняется от нульпункта больше, чем на одно деление, следует заново выполнить первую поверку и снова установить ось вращения алидады в вертикальное положение. Процедура установки оси вращения алидады в вертикальное положение называется горизонтированием теодолита. Поверка перпендикулярности визирной оси трубы к оси вращения трубы. Эта поверка выполняется с помощью отсчетов по горизонтальному кругу при наблюдении какой-либо визирной цели. Если условие выполняется, то при вращении трубы вокруг своей оси визирная линия трубы описывает плоскость, совпадающую с коллимационной плоскостью. Если угол между визирной линией трубы и осью вращения трубы не равен точно 90o, то при вращении трубы визирная линия будет описывать коническую поверхность с углом при вершине конуса 180 – 2С, где С – угол между фактическим положением визирной линии трубы и ее теоретическим положением; угол С называется коллимационной ошибкой (рис.4.6).  Рис.4.6 Рис.4.7 Навести трубу на точку можно при двух положениях вертикального круга: круг слева и круг справа; эти положения называются “круг лево” – КЛ или L и “круг право” – КП или R. Пусть при положении КЛ отсчет по лимбу будет NL. Для наведения трубы на точку при КП нужно перевести трубу через зенит и повернуть алидаду на 180. Если С = 0, то алидаду нужно повернуть точно на 180, то-есть, разность отсчетов при КЛ и КП равна точно 180 (рис.4.7). Если С= 0, то при том же положении алидады изображение точки будет находиться не в центре сетки нитей и для наведения на точку нужно повернуть алидаду на угол С (рис.4.8). Отсчет по лимбу изменится и, если правильный отсчет был NL, то отсчет, искаженный коллимационной ошибкой, будет N’L = NL + C, а NL = N’L – C. (4.2)  Рис.4.8 Рис.4.9 Чтобы навести трубу на точку при КП, нужно перевести ее через зенит и повернуть алидаду на угол 180 – 2C (рис.4.9), отсчет по лимбу будет равен: NR’ = NL + C + 180 – 2C = NR – C. (4.3) Таким образом, можно написать: NL’ = NL + C, NR’ = NR – C. Средний отсчет из отсчетов при КЛ и КП свободен от влияния коллимационной ошибки, 0.5 * (NL’ + NR’) = 0.5 * (NL + NR), а значение двойной коллимационной ошибки равно: 2C = NL’ – NR’ + 180. (4.4) В теодолитах с односторонним отсчитыванием по лимбу в каждом отдельном отсчете (и при КЛ и при КП) присутствует еще ошибка эксцентриситета алидады, поэтому значение коллимационной ошибки, подсчитанное по формуле (4.4), будет включать ошибку эксцентриситета. Для таких теодолитов (Т30, Т15, Т5) коллимационную ошибку определяют по более сложной методике, состоящей из следующих действий: навести трубу при КЛ на четко видимую точку, расположенную вблизи горизонта, взять отсчет по лимбу NL’, перевести трубу через зенит, навести ее на ту же точку при КП и взять отсчет по лимбу NR’, ослабить зажимной винт подставки и повернуть теодолит относительно подставки примерно на 180, навести трубу на точку при КЛ, взять отсчет NL”, навести трубу на точку при КП, взять отсчет NR”, вычислить коллимационную ошибку по формуле: 2C = 0.5 * [(NL’ + NL”) – (NR’ + NR”) + 360o. (4.5) Исправление коллимационной ошибки, если она больше допустимого значения, производится одинаковым для большинства теодолитов способом: вычисляют правильный отсчет: NL = NL’ – C, или NR = NR’ + C и устанавливают его на лимбе. При этом изображение точки не будет совпадать с центром сетки нитей на величину С. Боковыми исправительными винтами сетки нитей совмещают центр сетки нитей с изображением точки. После этого повторяют определение 2С. Влияние коллимационной ошибки на отсчет по лимбу. При наблюдении точек, расположенных вблизи плоскости горизонта, отсчет по лимбу искажается на величину коллимационной ошибки С с одним знаком при КЛ и с другим знаком при КП. Но иногда приходится наблюдать точки, которые располагаются выше или ниже плоскости горизонта, а при астрономических наблюдениях трубу теодолита наводят на звезды, устанавливая ее на любой угол наклона. Рассмотрим, как искажается отсчет по лимбу из-за влияния коллимационной ошибки в общем случае. На рис.4.10 точка O – точка пересечения оси вращения трубы HH1и визирной линии трубы. Труба направлена на высокорасположенную точку W; угол наклона визирной линии трубы – ν. Проведем через точку W вспомогательную вертикальную плоскость; LL1 – это линия пересечения этой плоскости с плоскостью горизонта точки О.  Рис.4.10 При С=0 визирная линия трубы занимает положение OW и коллимационная плоскость пересекает плоскость горизонта по линии OM. При наличии коллимационной ошибки визирная линия трубы займет положение OW’. Коллимационная плоскость в этом случае пересекает плоскость горизонта по линии OM’. Чтобы навести трубу на точку W, нужно повернуть алидаду на угол ε1, и отсчет по лимбу изменится на величину этого угла. Из треугольника MOM’ выразим тангенс угла ε1: и по малости его запишем: Но MM’ = WW’, поэтому Из треугольника WOW’ найдем тангенс угла С и вследствие малости угла С напишем: отсюда выразим длину отрезка WW': WW’ = C * OW (4.7) и, подставив это выражение в формулу (4.6), получим: Из треугольника WOM видно, что: подставив это выражение в формулу (4.8), получим окончательно: Если угол наклона трубы ν небольшой, то косинус этого угла мало отличается от единицы и ε1 = C. Обычно каждую точку наблюдают при двух положениях круга, и средний отсчет свободен от влияния коллимационной ошибки. Поверка перпендикулярности оси вращения трубы к оси вращения алидады. Четвертое условие обеспечивает вертикальное положение коллимационной плоскости. Для проверки этого условия используют хорошо видимую высоко расположенную точку М. Сначала наводят трубу на точку при КЛ и проектируют точку на уровень горизонта теодолита зрительной трубой; отмечают точку m1 (рис.4.11). Затем переводят трубу через зенит, наводят ее на точку при КП и снова проектируют точку на уровень горизонта теодолита; отмечают точку m2. Если ось вращения трубы перпендикулярна оси вращения алидады, то проекция точки М оба раза попадет в точку m; в противном случае точек будет две – m1 и m2. Положение, при котором один конец оси трубы выше другого, возникает, когда высота подставок трубы неодинакова; вследствие этого рассматриваемую поверку иногда называют поверкой неравенства подставок.  Рис.4.11 Для исправления угла между осями HH1 и ZZ1 нужно изменить высоту той подставки, которая имеет исправительный винт. Исправление неравенства подставок выполняется методом последовательных приближений. Если теодолит не имеет исправительного винта подставки, то при обнаружении неравенства подставок его нужно сдать в мастерскую. Влияние неравенства подставок на отсчет по лимбу. Пусть ось вращения трубы HH1 наклонена к горизонту на угол i и занимает положение H’H’1 (рис.4.12). Если бы наклона не было, то точка М проектировалась бы в точку m. При наклоне оси точка М проектируется в точку m1, и ошибка отсчета по лимбу будет равна углу ε2. Определим величину этого угла.  Рис.4.12 Из треугольника mOm1 следует: или по малости угла ε2: Из треугольника mMm1, в котором угол при точке M равен i, находим: по малости угла i принимаем tg(i) = i, поэтому откуда mm1 = i * Mm . (4.11) Подставим (4.11) в (4.10) и получим: Из треугольника MOm выразим тангенс угла ν: и,подставив это выражение в (4.12), получим окончательно: ε2 = i * tg(ν) . (4.13) При ν = 0 влияние неравенства подставок равно нулю при любых значениях угла i. Если ось вращения трубы наклонена к горизонту из-за неравенства подставок, то наклон коллимационной плоскости имеет противоположные знаки при КЛ и КП, и ошибка отсчета тоже имеет противоположные знаки; в среднем отсчете ошибка ε2 исключается. Влияние наклона оси вращения алидады на отсчет по лимбу. Наклон оси ZZ1 на угол i приводит к тому, что ось вращения трубы будет наклонена к горизонту на тот же угол (рис.4.13); коллимационная плоскость отклонится от вертикального положения на тот же угол. Следовательно, и влияние наклона оси вращения алидады аналогично влиянию неравенства подставок. Различие состоит в том, что ошибка в отсчете по лимбу из-за наклона оси вращения алидады имеет один и тот же знак при КЛ и КП. Таким образом, и средний отсчет также содержит эту ошибку. Для ослабления влияния наклона оси вращения алидады следует как можно тщательнее выполнять горизонтирование теодолита и следить за пузырьком уровня во время работы. При точных измерениях углов для исключения этой ошибки определяют угол i из дополнительных отсчетов по шкале уровня и вводят в отсчеты по лимбу поправки, вычисляемые по формуле (4.13). Рис.4.13 Поверка сетки нитей. Поверка пятого условия выполняется последней. Наводят трубу на хорошо видимую точку и наводящим винтом смещают ее по высоте. Если при этом изображение точки остается на вертикальной нити сетки нитей, то условие выполняется. Если изображение точки сходит с вертикальной нити, нужно ослабить исправительные винты сетки нитей и развернуть сетку в нужном направлении. После этого следует повторить поверку и снова определить коллимационную ошибку, так как при ослаблении и затягивании исправительных винтов сетки нитей ее центр мог сдвинуться в сторону. Кроме геометрических условий у теодолита проверяют так называемые механические условия: отсутствие механических повреждений – изломов, изгибов, трещин и т.п.; это проверяется путем внешнего осмотра, при котором следует удостовериться и в полной комплектности прибора; плавность вращения всех вращающихся деталей, то-есть, отсутствие заеданий, тугого вращения, скрипа и стука; плавность и легкость работы зажимных винтов; плавность и равномерность работы наводящих винтов; равномерность и легкость работы подъемных винтов. Эксцентриситет алидады. В плоскости лимба горизонтального круга имеются три характерных точки: D – центр круга делений лимба, A – центр вращения алидады, L – центр вращения лимба (рис.4.14). В идеальном теодолите все три точки должны совпадать, но в действительности они не совпадают.Несовпадение точки A с точкой D называется эксцентриситетом алидады, несовпадение точки L с точкой D называется эксцентриситетом лимба, несовпадение точек A и L называется эксцентриситетом осей. Рассмотрим влияние эксцентриситета алидады на отсчеты по лимбу. Отрезок AD называется линейным элементом эксцентриситета алидады и обозначается буквой l. Рис.4.14 Рис.4.15 Некоторые теодолиты имеют два отсчетных устройства, отстоящих одно от другого на 180. Вследствие эксцентриситета алидады отсчет по одному отсчетному индексу будет меньше правильного отсчета на угол ε: N’1 = N1 – ε, (4.14) а по другому отсчетному индексу – больше правильного на угол ε: N’2 = N2 + ε. (4.15) Средний отсчет будет свободен от влияния эксцентриситета: N = 0.5*(N1′ + N2′) = 0.5*(N1 + N2) . Чтобы получить численное значение эксцентриситета, нужно из отсчета N2′ (4.15) вычесть отсчет N1′ (4.14): N2′ – N1′ = N2 – N1 + 2*ε, но N2 – N1 = 180, поэтому: ε = 0.5*(N’2 – N’1 + 180). (4.16) При вращении алидады взаимное положение линейного элемента эксцентриситета алидады и отсчетных индексов изменяется, и величина ошибки отсчета ε’ зависит от угла γ (рис.4.15): ε’ = ε * Sin(γ) . (4.17) У теодолитов с односторонним отсчитыванием отсчет по лимбу искажается на величину ε’ с одним знаком при КЛ и с другим знаком при КП; в среднем отсчете влияние эксцентриситета исключается. Из всех ошибок отсчитывания по лимбу, возникающих вследствие нарушения геометрических условий, можно выделить симметричные ошибки, то-есть такие, которые имеют разные знаки при КЛ и КП и влияние которых в среднем отсчете устраняется, и несимметричные ошибки, влияние которых в среднем отсчете не устраняется. К симметричным ошибкам относятся коллимационная ошибка, ошибка из-за неравенства подставок, ошибка эксцентриситета. К несимметричным ошибкам относятся ошибка наклона оси вращения алидады, ошибки делений лимба и некоторые другие. 43. Измерение горизонтальных углов способом круговых приемов. Измерение горизонтального угла способом круговых приемов. С 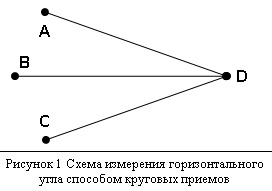 пособ измерения угла круговыми приемами применяют в том случае, если точка является вершиной более чем двух направлений. Принципиальная схема измерения горизонтального угла данным способом изображена на рисунке 2. Угол получают как разность двух направлений. Направление с наиболее благоприятными условиями для визирования принимают в качестве начального(например, DC на рисунке 2). Далее действуют в следующей последовательности: пособ измерения угла круговыми приемами применяют в том случае, если точка является вершиной более чем двух направлений. Принципиальная схема измерения горизонтального угла данным способом изображена на рисунке 2. Угол получают как разность двух направлений. Направление с наиболее благоприятными условиями для визирования принимают в качестве начального(например, DC на рисунке 2). Далее действуют в следующей последовательности:При круге лево на лимбе устанавливают отсчет, близкий к нулю, закрепляют алидаду и, вращая лимб, визируют на точку С. Установленный отсчет записывают в журнал измерений (табл. 2, столбец 3). При неподвижном лимбе вращают алидаду по часовой стрелке, наводят зрительную трубу на точки А, В и опять на С. После каждого визирования берут и записывают в журнал отсчеты (табл. 2, столбец 3). Их значения, полученные при визировании на начальное направление, должны быть равны (полевой контроль). При измерении техническим теодолитом разность между ними (незамыкание горизонта) не должна быть больше 1'. Указанные действия составляют первый полуприём. Не изменяя положения лимба, переводят зрительную трубу через зенит и при круге право выполняют второй полуприём. При этом вращение алидады осуществляют против хода часовой стрелки. Если незамыкание горизонта отвечает допуску, вычисляют (табл. 2, столбец 4) средние из отсчетов (при этом усредняют только минуты, а градусы берут из первого полуприема) и по средним на начальное направление вычисляют незамыкание горизонта ω (табл. 2, столбец 5). Затем в средние направления вводят поправки Δ (табл. 2, столбец 4), которые вычисляют по формуле |