Курсовая на темуЛенточные конвейеры. пояснительная записка. 1 Теоретические основы конвейера с подвесной 3 закрывающейся лентой
 Скачать 2.22 Mb. Скачать 2.22 Mb.
|

Часть ленты, которая принимает транспортируемый груз, поглощает энергию, генерируемую при падении, успокаивает, ускоряет и, в завершении, захватывает транспортируемый груз. Рисунок 1.7 Загрузка Привод / повороты. Лента проводится на поворотах при помощи отдельных оборотных шкивов. Приводы устанавливаются на поворотах под углом минимум 90°. 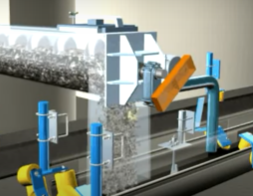 Рисунок 1.8 Работа конвейерной ленты  Рисунок 1.9 Привод / повороты Разгрузка. эластичность ленты позволяет производить эффективную разгрузку. Горизонтальная разгрузка: Лента открывается наружу и постепенно из грушевидной приобретает форму горизонтальной плоской ленты (похожую на традиционные ленточные конвейеры). После процесса разгрузки лента приобретает свою прежнюю форму.  Рисунок 1.10 Горизонтальная разгрузка Промежуточная разгрузка: Данная функция позволяет осуществлять полную или частичную разгрузку, возвращая груз по кругу, либо разгружая конвейер дальше по трассе.  Рисунок 1.11 Промежуточная разгрузка 1.5 Технические характеристики Sicon 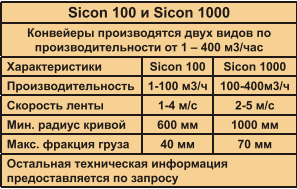 Рисунок 1.12 Технические характеристики Sicon 100 и Sicon 1000 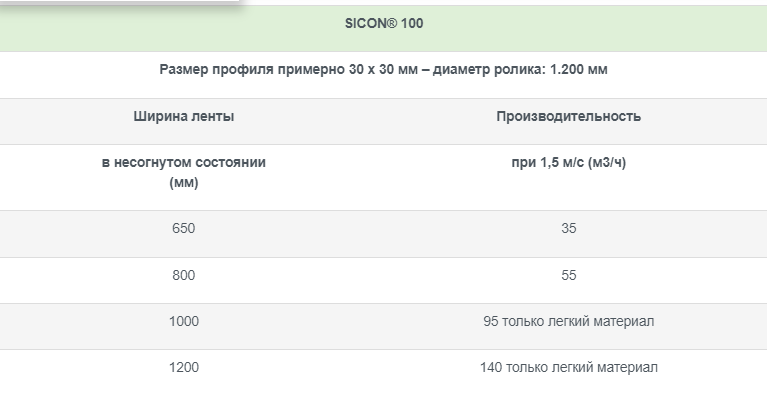 Рисунок 1.13 Стандартная программа Sicon 100 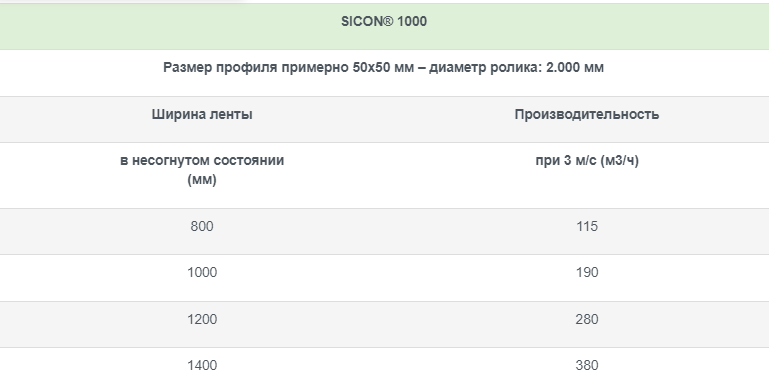 Рисунок 1.14 Стандартная программа Sicon 1000 Для высокой производительности, длинные транспортерные ленты и высокая нагрузка. Конвейерные ленты и отрасли промышленности 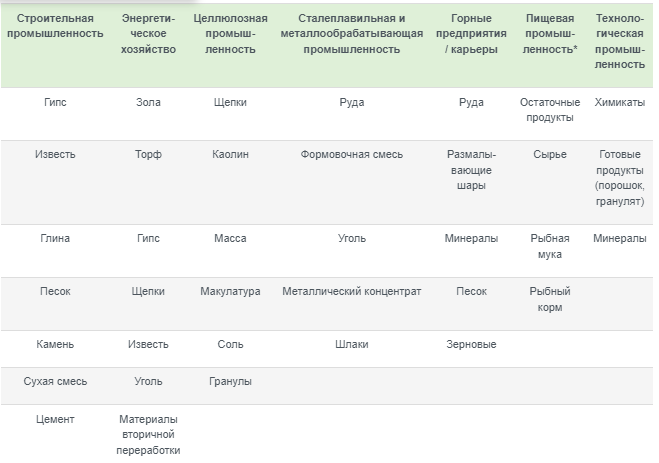 Рисунок 1.15 Конвейерные ленты и отрасли промышленности 2 РАСЧЁТ КОНВЕЙЕРА SICON 100 В данном разделе будет произведён расчет конвейера с подвесной закрывающейся лентой Sicon 100. Его исходные данные, расчёт натяжения в конечных точках участков, и, выявление максимального усилия, а также расчетный момент муфты и диаметра вала приводного барабана, проекция основного узла конструкции 2.1Исходные данные Конвейер с подвесной закрывающейся лентой Sicon 100 Геометрические параметры конвейера L = 120м , A = 30м, a=12 Производительность конвейера: Q = 140т/ч. Насыпная плотность груза: ρН = 920кг/м3. Угол откоса: β = 36°. 2.2 Расчет конвейера с подвесной закрывающейся лентой Sicon 100 По роду груза (сыпучий продукт) и расчетной производительности Q = 140 т/ч, принимаем скорость транспортирования v = 2,5 м/с, и определяем ширину ленты ВЛ, м 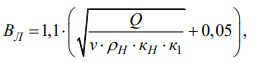 где ρН – насыпная плотность груза, кг/м3; КН - коэффициент, учитывающий уменьшение площади поперечного сечения груза, и зависящий от угла наклона конвейера в месте загрузки; К1 - коэффициент, учитывающий тип роликовых опор. Принимаем КН =0,95. В зависимости от вида транспортируемого груза, по ГОСТ 22645 – 77, выбираем желобчатые трехроликовые опоры рабочей ветви с углом наклона роликов αР = 300. Принимаем коэффициент К1 = 0,51, тогда ширина ленты,  Принимаем ширину ленты ВЛ = 500 мм. Определяем массу одного метра ленты qЛ, кг/м, где ВЛ – ширина ленты, м. Выбираем тип роликовых опор холостой и рабочей ветвей, которые установлены ГОСТ 22645 - 77. Холостой ветви – РН – 50, массой 9,8 кг, рабочей РЖ – 50 – 30, массой 12,0 кг. Определяем погонную массу роликовых опор, рабочей Р qР и холостой Х qР ветви, кг/м, где qР – масса роликовых опор, кг; lР и lХ – расстояние между роликовыми опорами рабочей и холостой ветви, м. Расстояние между роликовыми опорами рабочей ветви принимаем равным 1,5м, а холостой ветви – 3 м, следовательно 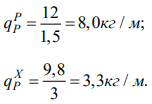 Определим массу груза qГ, кг/м, на одном метре ленты  где Q – расчетная производительность, т/ч; v – скорость движения ленты, м/с. Рассчитываем необходимые геометрические параметры конвейера и проводим тяговый расчет, предварительно разбив контур трассы на участки по видам сопротивлений. Участок 1 – 1. Натяжение тягового элемента в точке один F1, H, принимаем где FCБ – натяжение тягового элемента в точке сбегания ленты с приводного барабана, Н. Натяжение тягового элемента в точке два F2, Н, где W1-2 – сила сопротивления перемещению ленты на горизонтальном участке 1 - 2 холостой ветви, Н, где g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м; qРХ – погонная масса роликовых опор холостой ветви, кг/м; l1-2 – длина прямого участка холостой ветви, м; wХР – коэффициент сопротивления роликовых опор холостой ветви. Подставив в уравнение получим Приводная станция нуждается в обслуживании, поэтому, для нее нужна площадка, размер которой позволил бы подойти к ней с любой стороны. Этот размер должен быть минимум 800 мм. Поэтому, длину участка 1 – 2 принимаем исходя из конструктивных соображений равным 2 м. Коэффициент сопротивления роликовых опор холостой ветви, для конвейеров, работающих на открытом воздухе, принимаем равным 0,035. Участок 2-3. На этом участке лента движется вниз, следовательно, появляется знак «-» и натяжение тягового элемента в точке три F3, Н, рассчитывается следующим образом. где ξБ – коэффициент сопротивления при огибании поворотного барабана; g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м; l2-3 = 1,0 м - длину участка выбираем конструктивно. Коэффициент сопротивления ξБ, при огибании поворотного барабана Участок 3 – 4. Натяжение тягового элемента в точке четыре F4, Н, где ξБ - коэффициент сопротивления при огибании поворотного барабана; g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м; l3-4 – длина участка (выбирается конструктивно), м. Коэффициент сопротивления ξБ, при огибании поворотного барабана, равен 1,04. Участок 4 – 5. Натяжение тягового элемента в точке пять F5, Н, с учетом силы сопротивления перемещению ленты на горизонтальном участке холостой ветви. где W4-5 – сила сопротивления перемещению ленты на горизонтальном участке 4 - 5 холостой ветви, Н, где g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м; qРХ – погонная масса роликовых опор холостой ветви, кг/м; l4-5 – длина прямого участка холостой ветви, м; wХР – коэффициент сопротивления роликовых опор холостой ветви. Диаметр натяжного барабана принимаем равным, диаметру приводного барабана, следовательно, длина участка l4-5 , Участок 5 – 6. Натяжение тягового элемента в точке шесть F6, Н, с учетом сопротивления, возникающего при огибании поворотного барабана где ξБ - коэффициент сопротивления при огибании поворотного барабана. Коэффициент сопротивления ξБ , при огибании поворотного барабана, равен 1,03. Участок 6 – 7. Натяжение тягового элемента F7, Н, в точке семь, с учетом силы сопротивление перемещению ленты на наклонном участке холостой ветви где W6-7 – сила сопротивления перемещению ленты на наклонном участке 6 – 7 холостой ветви, Н, где g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м qРХ – погонная масса роликовых опор холостой ветви, кг/м; l6-7 – длина наклонного участка холостой ветви, м; wХР – коэффициент сопротивления роликовых опор холостой ветви; α – угол наклона трассы конвейера, град. Произведение l6-7 cos A 30м; - горизонтальная проекция наклонного участка конвейера, а вертикальная проекция наклонного участка (высота подъема). Участок 7 – 8. Натяжение тягового элемента в точке восемьF8, Н, с учетом сопротивления, возникающего при огибании натяжного барабана, где ξБ - коэффициент сопротивления при огибании поворотного барабана. Коэффициент сопротивления ξБ, при огибании поворотного барабана равен 1,06. Участок 8 – 9. Натяжение в точке девять F9, Н, с учетом сил сопротивления возникающих: при перемещении ленты в пункте загрузки и на наклонном участке рабочей ветви конвейера где WЗАГР – сила сопротивления в месте загрузки, Н; W8-9 – сила сопротивления, на наклонном участке рабочей ветви конвейера, Н, где С = 1,3 – 1,5 коэффициент, учитывающий трение груза о направляющие борта и стенки воронки, и, зависящий от физико-механических свойств груза; v – скорость движения ленты, м/с; Q – расчетная производительность конвейера, т/ч; где g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м; qРР – погонная масса роликовых опор рабочей ветви, кг/м; qГ – масса груза на одном метре ленты, кг/м; А – горизонтальная проекция наклонного участка рабочей ветви, м; α – угол наклона конвейера, град; Н – высота подъема наклонного участка конвейера, м; wРР – коэффициент сопротивления роликовых опор рабочей ветви. Коэффициент сопротивления роликовых опор wРР рабочей ветви принимаем равным 0,04. 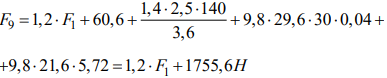 Участок 9 – 10. Натяжение в точке десять F10, H,c учетом сопротивления, возникающего при огибании роликовых опор, где δ – угол огибания лентой роликовых опор, рад; wРР – коэффициент сопротивления роликовых опор рабочей ветви. Участок 10 – 11. Натяжение тягового элемента в точке одиннадцать F11, H, c учетом сил сопротивления перемещению ленты на горизонтальном участке рабочей ветви конвейера, где W10-11 – сила сопротивления, на горизонтальном участке рабочей ветви конвейера, Н, где g – ускорение свободного падения, м/с2; qЛ – масса одного метра ленты, кг/м; qРР – погонная масса роликовых опор рабочей ветви, кг/м; qГ – масса груза на одном метре ленты, кг/м; l10-11 – длина горизонтального участка рабочей ветви, м; wРР – коэффициент сопротивления роликовых опор рабочей ветви. Найдем натяжение тягового элемента F11, в точке одиннадцать, Н, При отсутствии скольжения ленты по барабану, зависимость между натяжениями набегающей и сбегающей ветви по уравнению Эйлера можно записать так где ƒ – коэффициент трения ленты о приводной барабан; αБ – угол обхвата приводного барабана лентой, град.; FНБ.- натяжение тягового элемента в точке набегания на приводной барабан, Н; FСБ – натяжение тягового элемента в точке сбегания ленты с приводного барабана, Н. Так как FНБ F11 ,а FСБ F1, то |