Контрольная работа по дисциплине детали машин и основы конструирования
 Скачать 3.27 Mb. Скачать 3.27 Mb.
|

|
Институт____________________________ Кафедра Прикладной механики и инженерной графики КОНТРОЛЬНАЯ РАБОТА по дисциплине: «ДЕТАЛИ МАШИН И ОСНОВЫ КОНСТРУИРОВАНИЯ» Выполнил: _________________________ (фамилия, имя, отчество) ______________________________________ (направление, форма обучения, курс, группа, ______________________________________ номер зачетной книжки) Руководитель: _________________________ (фамилия, имя, отчество) Оценка: _______________________________ Санкт-Петербург 20 ______
ИСХОДНЫЕ ДАННЫЕ Спроектировать электромеханический привод ленточного конвейера, включающего электродвигатель, клиноременную передачу, двухступенчатый цилиндрический редуктор и соединительную муфту. Приводной (рабочий) вал конвейера смонтирован на двух опорах симметричных относительно приводного барабана. 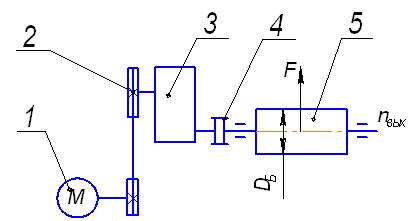 Рис.1. Структурная и кинематическая схема привода: 1 – электродвигатель, 2 – клиноременная передача, 3 – редуктор, 4 – муфта, 5 – приводной барабан конвейера. Данные для расчетов:
Институт________________ Студент _____________________ Курс______ Группа_______ Руководитель _________________ Выдано _________________ Срок сдачи ____________________ ОГЛАВЛЕНИЕ Введение 4 Расчётная схема привода 5 Определение требуемой мощности электродвигателя, выбор электродвигателя 6 Определение кинематических, силовых и энергетических параметров механизмов привода 7 Выбор редуктора 8 Расчёт клиноременной передачи 9 Выбор цепной муфты 14 Разработка конструкции вала приводного барабана конвейера 15 Выбор подшипников вала приводного барабана 20 Расчёт соединения вал – ступица 21 Выводы по работе 22 Библиографический список 22 Исходные данные для расчетно-практической работы ………………23 ВВЕДЕНИЕ Ленточные конвейеры относятся к транспортирующим машинам с гибким тяговым органом. Они используются для перемещения опилок, щепы, стружки, пылящих и штучных грузов, а также других мелкогабаритных материалов и изделий. Устанавливаются ленточные конвейеры, в основном, внутри производственных цехов. В пояснительной записке приводится последовательность кинематических, силовых и энергетических расчётов привода с выбором типа и размеров стандартных агрегатов: электродвигателя, редуктора, а также расчёт дополнительной клиноремённой передачи с клиновым ремнём нормального сечения. Выходной вал редуктора соединяется с ведущим валом с помощью компенсирующей цепной муфты. Выбор цепной муфты осуществляется по каталогу. Регулирование скорости конвейера в процессе работы не предусмотрено. В пояснительной записке также приводится разработка конструкции вала приводного барабана, расчет соединения вал - ступица барабана, выбор и определение расчётного базового ресурса подшипников вала приводного барабана. 1. РАСЧЁТНАЯ СХЕМА ПРИВОДА В  задании предусматривается проектирование и расчёт электромеханического привода ленточного конвейера, включающего электродвигатель, клиноременную передачу, двухступенчатый цилиндрический редуктор и соединительную муфту. Приводной (рабочий) вал конвейера смонтирован на двух опорах, симметричных относительно приводного барабана. Блок – схема для расчёта электромеханического привода конвейера с обозначениями рассчитываемых параметров приведена на рис.1. задании предусматривается проектирование и расчёт электромеханического привода ленточного конвейера, включающего электродвигатель, клиноременную передачу, двухступенчатый цилиндрический редуктор и соединительную муфту. Приводной (рабочий) вал конвейера смонтирован на двух опорах, симметричных относительно приводного барабана. Блок – схема для расчёта электромеханического привода конвейера с обозначениями рассчитываемых параметров приведена на рис.1.Рис. 1. Блок – схема электромеханического привода Обозначения на блок-схеме:1 – электродвигатель, 2 – клиноремен-ная передача, 3 – редуктор, 4 – муфта, 5 – приводной барабан ленточного конвейера. п, – кинематические параметры валов: частота вращения и угловая скорость соответственно; Р, Т – энергетические и силовые параметры валов: мощность и вращающий момент соответственно; эл – вал электродвигателя; клр – вал клиноременной передачи; вх – входной вал редуктора; вых – выходной вал редуктора; б – приводной вал барабана. Ft– тяговое усилие на барабане; υ – скорость ленты конвейера. 2. ОПРЕДЕЛЕНИЕ ТРЕБУЕМОЙ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ, ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ Мощность на валу приводного барабана, затрачиваемая при работе конвейера, кВт Pб = Ft·υ = где Ft – тяговое усилие на барабане, кН; υ – скорость ленты конвейера, м/с. Определим значение общего коэффициента полезного действия (КПД) привода конвейера ƞобщ = ƞклр · ƞред · ƞмуф· ƞб = 0,95 · 0,93 · 0,97 · 0,98 = 0,84 КПД клиноремённой передачи принимаем ƞклр = 0,95; КПД редуктора принимаем ƞред = 0,93; КПД цепной муфты принимаем ƞмуф = 0,97; КПД барабана принимаем ƞб = 0,98. Определим значение расчётной мощности электродвигателя, кВт Ртр.эл = Рб / ƞобщ = Определим значение синхронной частоты вращения вала электродвигателя, об/мин  где: f – частота переменного тока, равная 50 Гц; р – число пар полюсов. По условию задания р = . Выбор электродвигателя из каталога осуществляется по значениям синхронной частоты вращения вала электродвигателя ncи расчетной мощности электродвигателя Ртр.эл на основании выполнения условия Рэл ≥ Ртр.эл. При выборе электродвигателя по условию Рэл ≤ Ртр.эл перегрузка по мощности не должна превышать 5 %. Исходя из вышеприведённых расчётов принимаем по табл. П1, П [3] следующие параметры двигателя серии АИР: тип двигателя АИР ; мощность Рэл = кВт; число оборотов nэл = об/мин; диаметр посадочного участка вала электродвигателя d1 = мм; длина посадочного участка вала электродвигателя l1 = мм; расстояние между осями болтов для крепления двигателя к натяжному устройству b10 = мм; ширина опорной поверхности лапок двигателя при креплении к раме bо = b10+ 5d10 = = мм. 3. ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКИХ, СИЛОВЫХ И ЭНЕРГЕТИЧЕСКИХ ПАРАМЕТРОВ МЕХАНИЗМОВ ПРИВОДА Частота вращения приводного барабана, об/мин  где υ– скорость ленты конвейера из задания, м/с; Dб – диаметр приводного барабана конвейера из задания, м. Определим общее передаточное отношение привода конвейера и произведем его разбивку по ступеням механических передач. iпр=nэл/nб = iпр=uпр Привод включает два передаточных механизма: клиноременную передачу и зубчатый редуктор. Предварительно примем передаточное число клиноременной передачи uклр = 2, тогда передаточное число редуктора будет равно uред = uпр/uклр = Стандартное передаточное число двухступенчатого редуктора принимаем из номинального ряда передаточных чисел по табл. П5 [3]: uред.ст. = Приняв uред. = uред.ст., уточним значение передаточного числа клиноременной передачи. uклр = uпр/uред.ст = Определим значения мощности на валах привода конвейера. Мощность на валу двигателя, кВт Р1 = Ртр.эл = Мощность на входном валу редуктора, кВт Рвх = Ртр.эл·ƞклр = Мощность на выходном валу редуктора, кВт Рвых = Рвх·ƞред = Мощность на валу приводного барабана, кВт Рб = Рвых·ƞмуф·ƞб = Определим значения частоты вращения валов привода конвейера. Частота вращения вала электродвигателя, об/мин n1 = nэл = Частота вращения входного вала редуктора, об/мин nвх = nэл / uклр = Частота вращения выходного вала редуктора, об/мин nвых = nб =nвх /uред.ст = Определим значения вращающих моментов на валах привода. Вращающий момент на валу электродвигателя, Н·м Т1 = Тэл. = 9550 · Pтр.эл / nэл = Вращающий момент на входном валу редуктора, Н·м Твх = Т1 · uклр · ƞклр = Вращающий момент на выходном валу редуктора, Н·м Твых = Твх · uред · ƞред = Вращающий момент на валу приводного барабана, Н·м Тб = Твых · ƞмуф · ƞб = 4. ВЫБОР РЕДУКТОРА Выбор редуктора осуществляется последовательно, начиная с наименьшего типо-размера редуктора. Редуктор выбирается из каталога по величине номинального вращающего момента на выходном валу Тном и номинального передаточного числа uред.ст. (табл. П5 [3]) при выполнении условия Tвых ≤ Tном. Согласно кинематическим расчётам (см. выше), принятое номиналь- ное передаточное число редуктора uред.ст = . Вращающий момент на выходном валу редуктора Твых. = Н·м. Согласно техническим характеристикам цилиндрических двухступенчатых горизонтальных редукторов типа Ц2У, выбираем редуктор Ц2У - с номинальным вращающим моментом на выходном валу Tном..= Н·м , что больше Tвых = Н·м (табл. П5 [3]). Для выбранного редуктора из табл. П6 [3] выписываем габаритные и присоединительные размеры, мм: межосевое расстояние быстроходной ступени awБ = ; межосевое расстояние тихоходной ступени awТ = ; длина корпуса редуктора L3 = ; ширина корпуса редуктора В1 = ; ширина редуктора с выступающими концами валов быстроходного (входного) L1 = ; тихоходного (выходного) L2 = ; расстояние по длине редуктора от края корпуса до оси выходного вала L4 = ; расстояние по длине редуктора между осями болтов крепления редуктора к раме А = ; расстояние по ширине редуктора между осями болтов крепления редуктора к раме А1 = ; диаметр входного вала редуктора d1 = ; диаметр выходного вала редуктора d2 = ; высота корпуса редуктора H1 = . 5  . Расчет клиноременной передачи . Расчет клиноременной передачи |