АКШП. 2. Описание конструкции и принципа действия подвесного ковочного манипулятора
 Скачать 66.86 Kb. Скачать 66.86 Kb.
|

|
1.Цель работы. Приобретение умений разрабатывать и анализировать конструкцию и кинематическую схему средств автоматизации и механизации (САМ). Подготовка к выполнению КР по дисциплине А, Р и ГПС КШП. 2.Описание конструкции и принципа действия подвесного ковочного манипулятора. Подвесной ковочный манипулятор применяется для захвата, подачи и другого перемещения тяжелых горячих заготовок и слитков при работе на гидравлических прессах. Тележка 5 перемещает по однорельсовому пути 6 подвесную колонку 4 которая присоединена к кабине управления 3 и корпусу манипулятора 1 в котором расположен хобот с клещевым зажимом 2. Хобот манипулятора может производить качание по отношению к горизонтальной оси, а также вращаться вокруг нее на 360°. Управление механизмами осуществляется с пульта, расположенного в кабине манипулятора 3. Возможно также дистанционное управление с расположением пульта у машиниста молота. 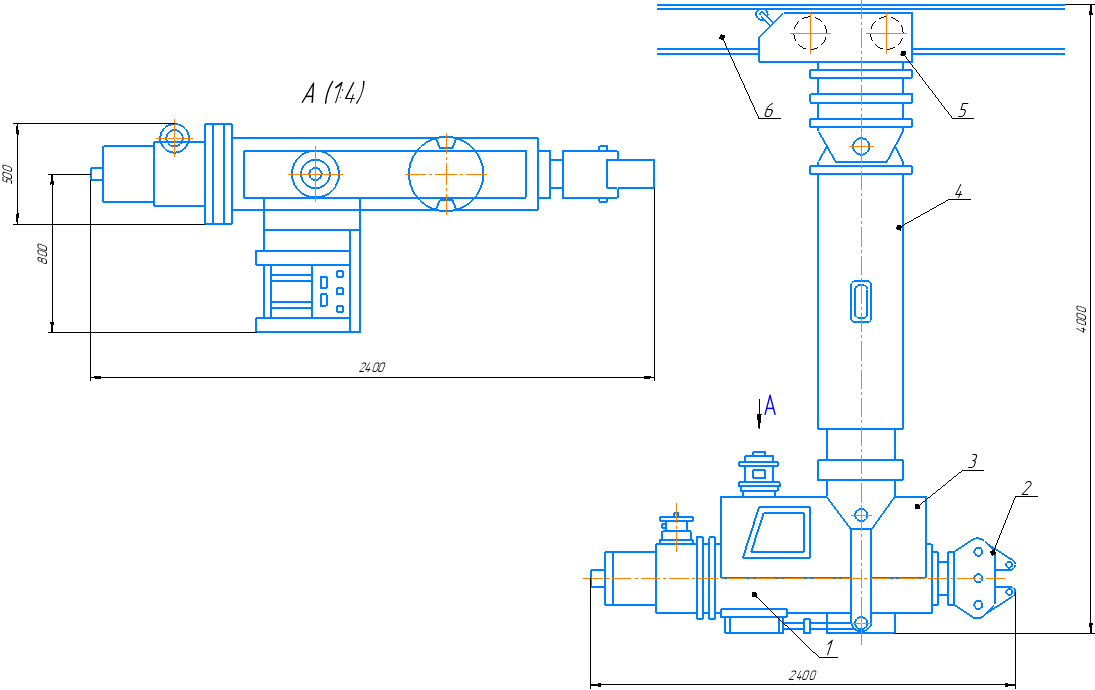 Рис. 2.1. Подвесной ковочный манипулятор: 1 - корпус манипулятора; 2 - хобот с клещевым зажимом; 3 - кабина управления; 4 - подвесная колонка; 5 - тележка; 6 - однорельсовый путь. 3.Структурная схема валкового подающего устройства Структурные схемы разрабатываются исходя из конструкции правильно гибочной роликовой установки. Это устройство относится к средствам автоматизации, так как его работа полностью автоматизирована. Средства механизации и автоматизации, несмотря на их многообразие, состоят из совокупности узлов и механизмов функционально связанных между собой. Анализ средств автоматизации позволяет составить обобщенную структурную схему (рис.2.). 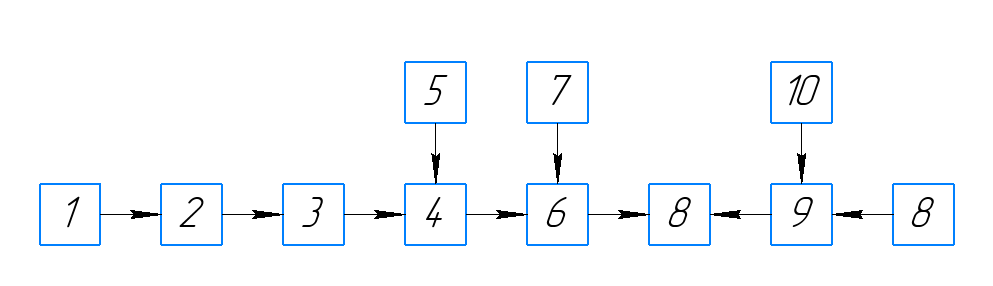 Рис. 3.1. Структурная схема подвесного ковочного манипулятора: 1– пульт управления, 2 – электродвигатель; 3 –механизм перемещения (тележка); 4 –подвесная колонка; 5 –механизм качения; 6 –хобот; 7 –механизм выдвижения хобота; 8 –заготовка; 9 –клещевой захват; 10 – механизм зажима клещей; Из структурной схемы видно, что у установки присутствует электромотор, приводящийся в действие при помощи пульта управления, который приводит в движение механизм перемещения (тележку). Механизм перемещения (тележка) в свою очередь перемещает подвесную колонку в которой имеется механизм качения. Колонка присоединена к корпусу, в котором установлен хобот, который подносится к заготовке и захватывает ее при помощи клещевого зажима, установленного на нем. 4.Кинематическая схема установки правильно гибочной роликовой 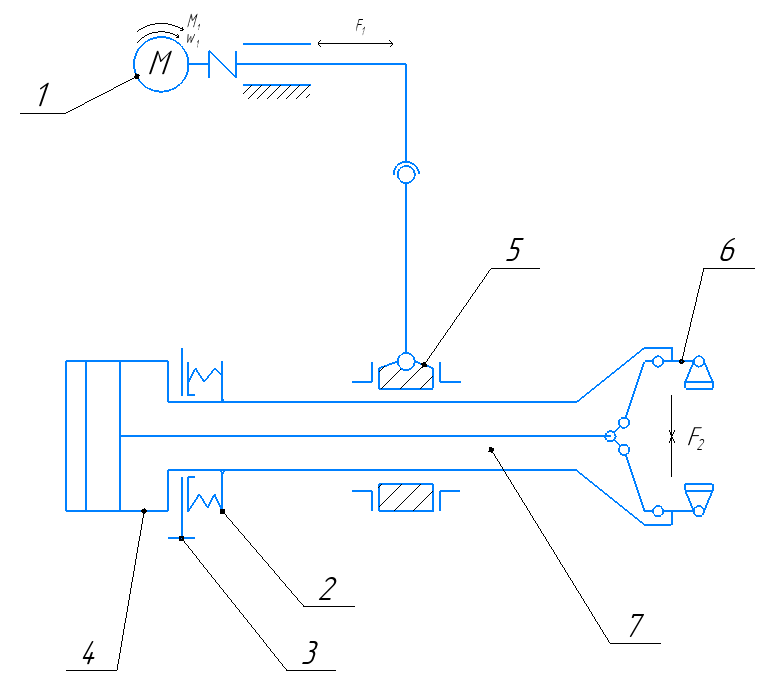 Рис. 4.1. Кинематическая схема подвесного ковочного манипулятора: 1 – электродвигатель, 2 – фрикционная предохранительная муфта, 3 – одноступенчатый редуктор, 4- силовой цилиндр, 5 -опора, 6-механизм зажима клещей, 7 – мундштук. F1 – Усилие, прилагаемое для перемещения манипулятора F2 – Усилие сжатия клещей М1 – Крутящий момент на валу электропривода; w1 – Частота вращения вала электродвигателя; |