2Техникоэкономическое обоснование
 Скачать 1.69 Mb. Скачать 1.69 Mb.
|

|
Расчет параметров настройки регулятора и переходных процессов. Выбор передаточной функции объекта. На последующих стадиях обработки результатов эксперимента производят выбор передаточной функции, необходимой для аппроксимации экспериментальных функций с помощью типовых элементарных звеньев.Предварительный выбор передаточной функции можно сделать по начальному участку переходной функции. Передаточной функцией, приведённой в таб.3 аппроксимируют переходные функции, наклон графиков которых в начальный момент времени максимален, т.е, переходные функции объектов с запаздыванием. Применение таких передаточных функций требует определения наименьшего числа параметров - двух для объектов с самовыравниванием. Однако переходные функции промышленных объектов не имеют, как правило, идеальных переходных характеристик. Для аппроксимации реальных переходных функций используют передаточную функцию (табл.3). Выбор аппроксимирующей передаточной функции часто определяется не только видом переходной функции, но и выбранным методом расчёта параметров расчёта регулятора, т. к. большинство из них разработаны с учётом выбора вполне определённой передаточной функции. 85 Определение динамических параметров объекта по его экспериментально снятой переходной функции производят графическимиили графоаналитическими методами.
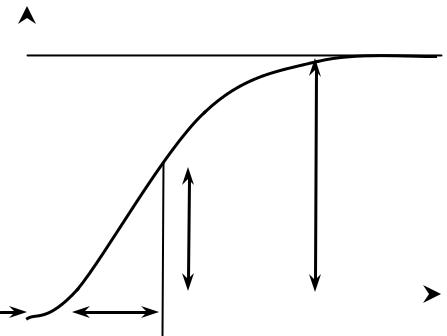 При определении динамических параметров объекта с самовыравниванием вначале проводят линию нового установившегосязначения h(∞), которое переходная функция должна достигнуть за бесконечное время. Её проводят на расстоянии примерно 0,05[h'(∞)-h(0)], где h' -линия установившегося значения в последней точке переходной функциибез самовыравнивания, от последних опытных значений переходной функции. Значение коэффициента передачи объекта определяют как разность установившихся нового и начального значений переходной функции: Kоб= h(∞)− h(0). Для определения временных постоянных проводят касательную в точке переходной функции, в которой скорость изменения dh(t)/dt имеет максимальное значение, т.е. из всех возможных касательных, которые можно провести к переходной функции, эта касательная должна иметь наибольший угол наклона. Скорость изменения переходной функции максимальна в начале координат, поэтому касательная проводиться именно в этой точке. Проекция отрезка касательной, заключённого между прямыми h(0) и h(∞), на ось времени равна постоянной времени Т. А, время запаздывания, τоб, определяется как расстояние на оси времени между 0 и точкой пересечения кривой разгона с осью времени (рис.4). 86 hp(t) Kоб= 0,8; Tоб= 3,1; τоб= 0,2. Точность такой аппроксимации можно оценить по разности экспериментального значения переходной функции в этой точке hЭ(Т) и её расчётного значения hp(T )=0,63[h(∞)− h(0)]=0,63kоб, После определения параметров передаточной функции необходимо проверка адекватности модели. Для этого вычисляется расчётное значение переходной функции hp (табл.4), в соответствии с передаточной функцией и вычисляется при различных значениях t по формуле, приведённой в табл. 16. Таблица 16
Для практических целей, по найденным параметрам найдём погрешность, возникающую при применении той или иной аппроксимирующей передаточной функции и которая должна быть не более 15% , по следующей формуле: =hÝ (t)−hp (t)⋅100 %,hÝ(∞)  где - расчётное значение переходной функции в момент времени t, hЭ (t) экспериментальное значение переходной функции в момент времени t, h(∞) установившееся экспериментальное значение переходной функции в конце эксперимента. таблица 17
Во всех случаях погрешность не превышает 15%. А это означает, что её можно эффективно использовать. 87 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||