|
|
Анотація диплом
2 ОГЛЯД АНАЛОГІВ
На сьогоднішній день металошукачі – це електронні індукційні прилади, що дозволяють виявляти металеві предмети в нейтральному або слабо прові- дному середовищі, тобто грунті,воді, стінах, в деревині, під одягом і в бага- жі, в харчових продуктах, в організмі людини і так далі. Бурхливий розвиток зробив ці прилади компактними надійними і дуже “інтелектуальними” Cфера застосування металошукачів помітно розширилася і окрім професійних і вій- ськових застосувань , стала охоплювати і область розваг, до яких відносяться “Пошук скарбів”в широкому змісті цього слова .
Металошукачі вже давно широко поширені і обговорюються на форумах. При погляді на дизайн цих приладів не покидає відчуття"іграшок", багато користувачів скаржаться на хисткість конструкції. Але за заявленими харак- теристиками вони чесно відпрацьовують вкладені в них гроші.
Серед присутніх на нашому ринку типів моделей з даної категорії, можна ви- ділити кілька найбільш популярних згідно посилання [5].
1 VLF детектори – метод за яким працюють такі прилади дозволяє побудувати високочутливі прилади з хорошим розрізненням металів за рахунок аналізу фазових характеристик. Схемотехніка приладів досить складна, котушки вимагають прецизійного балансування. По цьому мето- ду зараз будуються більшість серійних приладів, у тому числі і комп'юте- ризованих. Дискримінація об'єктів і настроєння від грунту в таких прила- дах робиться порівняно просто за допомогою фазозсувних ланцюгів.
Принцип дії VLF оснований на балансі між передавальною та прийом- ною котушкою,на низькій частоті.Низькі частоти дозволяють нейтралі- зувати вплив грунту і отримати чутливість до невеликих об`єктів.
| |
|
|
|
|
|
РВ21.468213.001 ПЗ
|
|
|
|
|
|
|
| |
|
|
|
|
|

Для металошукачів по принципу баланса індукції ,пред’являються особ- ливі вимоги до якості виготовлення пошукового датчика . Катушка склада- ється з передавальної та приймальної катушок ,які можуть мати DD конструкцію або кільце .
Такі металошукачі мають найбільшу популярність але вони є тяжкими у схематичному виконанні також для установлення на виробництво та налаш- тування.
Детектори на основі зриву резонансу OR - off resonance (зрив резо- нансу). Аналізованим параметром є амплітуда сигналу на котушці коливаль- ного контура, налагодженого близько до резонансу з сигналом, що подається на нього, від генератора. Поява металу в полі котушки викликає або досяг- нення резонансу або відхід від нього, залежно від виду металу, що призво- дить до збільшення або зменшення амплітуди коливань на котушці. Цей ме- тод також як і BFO розроблявся радіоаматорами, але відомостей про його ви- користання в серійних приладах для пошуку скарбів не виявлено.
У міру ускладнення конструкції приладу і збільшення його вартості по- кращується здатність приладу розпізнавати металевий предмет без викопу- вання. При відмінності вартості у декілька разів чутливість детекторів збі- льшується трохи(найчастіше вона складає20 - 45см для монет і близько1 -
2.0 м для великих знахідок). Проте і складні прилади, оснащені процесорами, можуть дати дуже приблизне ув'язнення про метал і глибину знахідки.
Детектори на основі імпульсної індукції ( PI - pulse induction імпульсна індукція). У приладах цього типу котушка пошукової голівки не є частиною коливального контура. У неї від запускаючого генератора подається імпульс- ний сигнал. Аналізованим параметром є час закінчення перехідного процесу (положення заднього фронту імпульсу напруги). До конструкції котушки не пред'являється особливих вимог. Відмінними рисами цього методу є: низька
| |
|
|
|
|
|
РВ21.468213.001 ПЗ
|
|
|
|
|
|
|
| |
|
|
|
|
|

робоча частота дотримання імпульсів (5-600 Гц), невелике споживання енер- гії, нечутливість до грунту. PI-метод часто використовується в підводних приладах для послаблення впливу води.
Пошукова котушка такого приладу з імпульсною індукцією є дуже про- стою в порівнянні з іншими типами приладів не потребує складних налашту- вань та калібрувань.Котушка використовується як для передачі,так і для приймання. Передавальна схема складається з простого електронного ключа, який підключає на короткий термін на батарею живлення. Опір котушки є дуже малим, тому по котушці може протікати струм в декілька ампер. Хоча сила струму велика, але час протікання є дуже коротким. Електронний ключ подає імпульси струму в котушк, потім обриває його потім знову включаєть- ся для подачі наступного імпульсу. Скважність, тобто відношення часу за який струм ввімкнутий, до часу коли струм вимкнутий ,складає зазвичай близько 4%. Це зберігає передатчик та котушку від перегріву та зменшує ро- зряд батареї . Швидкість повторення імпульсів (частота передатчика )типово- го металодетектора з імпульсною індикацією складає приблизно 100 герц.
Різні моделі МД використовують частоти від 22 герц до декількох кілогерц. Чим нижча частота передачі, тим більша випромінювана потужність. На більш низьких частотах досягається більша глибина та чутливість виявлення предметів вироблених зі срібла, але при цьому падає чутливість виявлення до нікелю та сплавам із золота. Такі прилади мають уповільнену реакцію, тому потребують дуже повільного переміщення рамки. Більш високі частоти під- вищують чутливість до нікелю та сплавам із золота. Однак менш чутливі до срібла.
ВЧ випромінювання не проникає глибоко в землю, як більш низькі час- тоти,але при цьому котушку можна переміщати більш швидко.Це дозволить перевірити більшу площу за заданий період часу. А також такі прилади більш чутливі до головних пляжних знахідок - виробам із золота. Передатчик діє
| |
|
|
|
|
|
РВ21.468213.001 ПЗ
|
|
|
|
|
|
|
| |
|
|
|
|
|
подібно до котушки запалення автомобіля кожний імпульс струму в переда- вальній котушці створює магнітне поле. Коли струм обривається,магнітне поле раптово зникає, але в цей час імпульс напруги протилежної полярності та великої амплітуди з`являється на виводах котушки. Такий викид напруги називається протидіючою електрорушійною силою. В автомобілі це саме та висока напруга,яка збуджує іскру запалення в свічках запалення.В нашому випадку металошукача з імпульсною індукцією амплітуда викиду нижче за- звичай від 100 до 130 вольт в піку. По тривалості імпульс дуже невеликий – до 30 мільйонних долі секунди (30 мікросекунд). Він називаєтся «відбитий імпульс».
Висновки: Серед переглянутих принципів роботи аналогів мтелалошу- качів можна зупинити свій вибір на імпульсному методі PI (pulse inductive), металошукачі цього типу є спеціалізованими інструментами. Основними пе- ревагами над іншими типами металошукачів є :
-не реагують на мінералізований грнут та морську воду (що є перевагою для роботи в зоні припливів)
-Якісний пошук металевих цілей не в залежності від їх розміру
-властивість глибинного пошуку в товщах землі (максимальна глибина пошуку серед аналогів)
-великий захват при умові виликої площі рамки
-простота використання, легкість підстроювання .
Тож в порівннні з приладами на принципах роботи VLF та детекторів на основі зриву резонансу OR вони показують гарні результати у властивостях відлаштування від грунту та “пробиття їх на максимальну глибину”
| |
|
|
|
|
|
РВ21.468213.001 ПЗ
|
|
|
|
|
|
|
| |
|
|
|
|
|
3 ОПИС СХЕМИ ТА ПРИНЦИП РОБОТИ
Проаналізувавши у попередньому розділі аналоги та визначившись із функціональними особливостями пристрою, необхідно створити структурну схему металошукача. Це у подальшому полегшить створення схеми електри- чної принципової.
3.1 Опис структурної схеми
На рис.1 представлена структурна схема металошукача на базі мікроко- нтролера ATmega8.
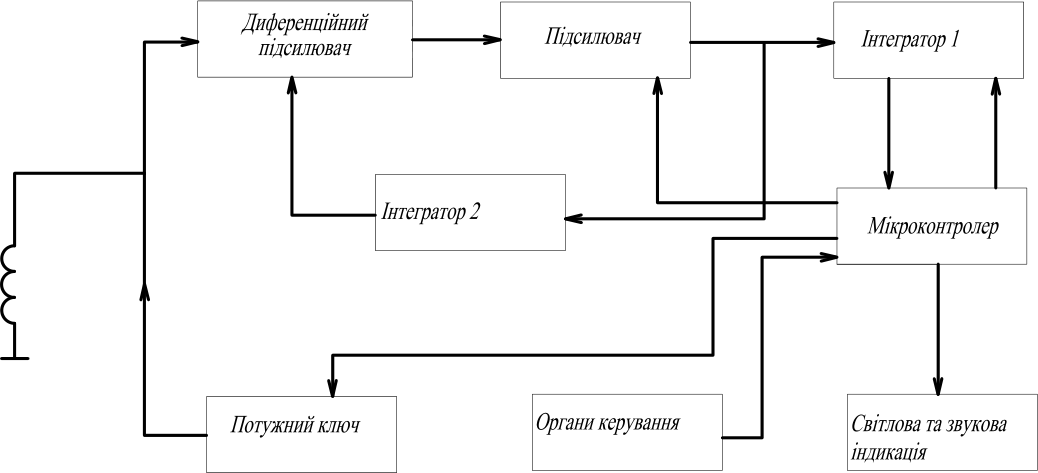
Рисунок 1 — Структурна схема металошукача
Однією з головних частин цієї схеми є застосування диференціального підсилювача у вхідному каскаді. Він служить для посилення сигналу, напруга якого вище напруги живлення. Подальше посилення забезпечує приймальний підсилювач. Для вимірювання корисного сигналу призначений перший інте- гратор. Під час прямого інтегрування проводиться накопичення корисного сигналу, а під час зворотного інтегрування - перетворення результату в циф-
| |
|
|
|
|
|
РВ21.468213.001 ПЗ
|
|
|
|
|
|
|
| |
|
|
|
|
|
рову форму. Другий інтегратор має велик у постійну інт грування (240 мс ) і лужить для балансу ання підсилювального тракту по по тійному струму.
Основним блоко , як видно із стру урної схеми, є блок мікроконтро е- ра. Він також осно ною складовою металошукача, ос ільки саме завдяки ікроконтролеру мо на програмувати, змінюва и харак еристики та керу а- ти пристроєм. За йог допомогою відбувається формува ня часових інтерва- лів для керування всі а вузлами пристрою а також інди ація та загальне ке- рування пристроєм. За допомогою пот ужного ключа від бувається імпульсне накопичення ене ргії катушці датчик , а потім пе рер вання ст руму після кого виникає імпул самоіндукції, що збуджує електр магнітне поле в мі-
шені.
3.2 Опис схеми лектричної принципової
Електрична схема металошукача показана на рисунку 2,
Рисунок 2 — Електри на принципова сх ма
| |
|
|
|
|
|
РВ21.468213. 01 П
|
|
|
|
|
|
|
| |
|
|
|
|
|
 
Схема побудована на базі мікроконтролера ATmega8, виведення інфор- мації здійснюється на графічний дисплей HG LCD1602, BC1602A. Потужний ключ зібраний на польовому транзистроі VT1 (рис.2) Оскільки застосований польовий транзистор типу IRFZ44 має ємність затвора білше 1000пФ, для йо- го швидкого закриття використовується попередній каскад на транзисторі VT2.РезисториR1таR2призначені для гасіння енергії самоіндукції що ство- рена катушкою датчика. При використанні глибинних катушок опір цих ре- зисторів може бути збільшено 680-820ом.Захисні діоди VD1, VD2 обмежу- юють перепади напруги на вході диференційного підсилювача .
Диференційний підсилювач виконаний у вигляді ОП DA. Мікросхема являє собою збірку з чотирьох ОП типу TL074 ОП має достатньо високу швидкодію мале споживання,низький рівень шуму,високий вхідний опір. Коефіцієнт підсилення диференційного підсилювача складає близько7.
Приймаючий підсилювач DA1:3 представляє собою неінвертуючий під- силювач з коефіцієнтом56. Під час дії високовольтної частини імпульсу са- моіндукції цей коефіцієнт понижується до 1 за допомогою аналогового клю- ча DD1:1 це попереджує перевантаження вхідного підсилюючого тракту і забезпечує швидкий вхід в режим для підсилення слабкого сигналу . Транзи- сториVT3,VT5,VT6,призначені для узгодження рівнів керуючих сигналів, що подаються з мікроконтролеру на аналогові ключі. Задопомогою другого інвентора DA1:2 відбувається автоматичне балансування вхідного підсилю- ючого тракту по постійому струму.
Вимірюючий перший інтегратор виконаний на DA1:4. На час інтегру- вання корисного сигналу відкривається ключDD1:2 і відповідно закриваєть- ся ключ DD1:3 Після завершення інтегрування сигналу ключDD1:2 закрива- ється і відкриваєтьсяDD1:3,накопичуючий конденсатор С7починає розря- джатися. Час розряду буде пропорційним напрузі, яка встановилася на конс-
| |
|
|
|
|
|
РВ21.468213.001 ПЗ
|
|
|
|
|
|
|
| |
|
|
|
|
| |
|
|
 Скачать 0.93 Mb.
Скачать 0.93 Mb.