Шпаргалки. Архитектура интегрированных автоматизированных систем управления состав элементов и подсистем, и их назначение, терминология, асутп, асуп (mrp Material Requirements Planning,
 Скачать 1.35 Mb. Скачать 1.35 Mb.
|

|
Архитектура интегрированных автоматизированных систем управления: состав элементов и подсистем, и их назначение , терминология, АСУТП, АСУП (MRP – Material Requirements Planning, MRP II – Manufacturing Resource Planning, ERP – Enterprise Resource Planning, EAM – Enterprise Asset Management). АСР (автоматические системы регулирования), АСУ (автоматизированные системы управления). АСУТП – автоматизированная система управления технологическими процессами – как правило, иерархически организованная двух- или трехуровневая система, выполняющая функции: -сбор информации о состоянии ТОУ; -поддержание технологических параметров на заданных значениях (уставках); -контроль за технологическими параметрами, для которых не выполняется функция регулирования; -сигнализация о параметрах, значения которых вышли за пределы, рассматриваемые как предельно допустимые; -блокировка управлений, являющихся результатом ошибочных действий технологического персонала; -ПАЗ процесса и производства. Перечисленные функции, как правило, выполняются подсистемами нижнего уровня - «control». Подсистемами второго и третьего уровней выполняются функции -архивирование событий; -вычисление по моделям (косвенное измерение) неизмеряемых технологических параметров, показателей качества продуктов производства; -выработка управлений для предотвращения развития аварийных событий, в частности, подключение резервного оборудования, диагностика наличия и причины неисправности и т.д. Перечисленные задачи относят к «продвинутым» (advance). Общее название: SCADA-системы (Supervisor Control And Data Acquisition) На этом уровне выделяют подсистемы: MRP – подсистемы автоматизированного планирования потребностей в сырье и материалах для производства; MRP II - подсистемы планирования производства с учетом наличных ресурсов и возможностей технологии. На уровне АСУП часто выделяют задачи: -планирования (управления) ресурсами (ERP - Enterprise Resource Planning); -управления основными фондами и имуществом (EAM - Enterprise Asset Management). АСУП можно рассматривать как ядро или одну из главных и необходимых подсистем интегрированных систем управления предприятием (ИСУ). В ИСУ обеспечивается автоматизированная информационная связь между подсистемами АСУТП, АСУП, АРМами.  Признак интегрированности системы: потоки информации, ИС дают возможность снять любую информацию с любой подсистемы (с правами доступа). Терминология, назначение и основные характеристики АСУТП: распределенные и централизованные СУ, иерархия в распределенных СУ (подсистемы уровня, регулирования технологических параметров, адаптации регуляторов, MES – Manufacturing Execution System; системы обеспечения безопасности. 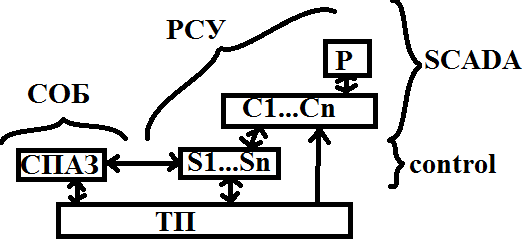 S1…..Sn – контроллеры АСР технол.параметров уровня control С1…..Сm - контроллеры уровня SCADA, Р – контроллер для целей автоматизации Control-уровень регулирования ТП SCADA – ур. диспетчерского контроля и сбора данных - II Эффективность управления реализуется задачами: нижний уровень – контроль и обеспечение заданных значений технологический параметров, на основе которых проводится управление. II уровень – вычисление и поддержание заданных ПК продуктов производства, расчет и оптимизации отдельных технико-экономических показателей. – «продвинутые» задачи. Решение задач второго уровня возможно на основе использования моделей (модели технологических процессов для расчета ПК и ТЭП и модели принятия решений. I и II уровни – нижние уровни – АСУТП. III уровень - уровень управления производством (АСУП). На этом уровне оптимизируются экономические и экологические параметры. Частью АСУТП является система обеспечения безопасности (СОБ). Эта система также строится как иерархическая. На нижнем уровне СОБ располагается ПАЗ. На более высоких уровнях СОБ располагаются системы диагностики неисправности элементов автоматизированного технологического комплекса (АТК), подсистема прогнозирования развития ситуации и выработки решений. Варианты реализаций функций контроля, защиты и т.д. - централизованно (ЦСУ ), фун-ии сосредоточены в одном вычислительном комплексе; - распределенно (РСУ), отдельные функции реализуются отдельными вычислительными компонентами, но между компонентами осуществляется взаимодействие. MES (Manufacturing Execution System) – подсистемы исполнения производства или технического исполнения плана; Структура АСУТП с APCS-подсистемами 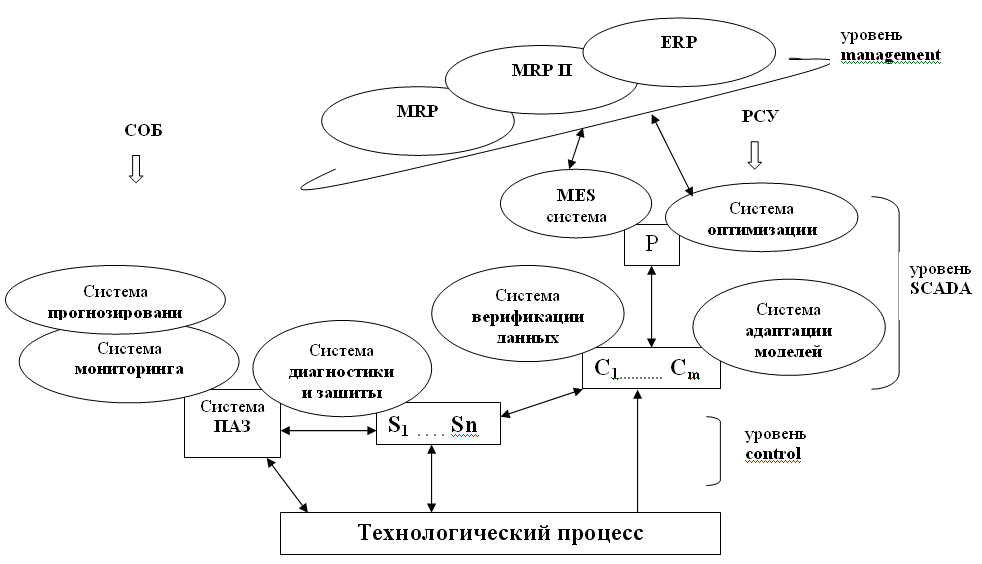 Классификация технологических объектов управления (ТОУ), понятие жизненного цикла АСУТП, системные принципы решения задач управления сложными ТОУ. Классификация процессов как объектов управления. По физико-химическим приемам переработки материалов выделяются следующие виды процессов: - механические процессы (измельчение, дозирование и т.д.), - гидромеханические (перемешивание, отстаивание), - тепловые (нагрев, выпаривание), - массообменные (ректификация, аб(ад)сорбция и т.д.), - химические (окисление, восстановление, синтез, крекинг и т.д.). По характеру проведения во времени выделяются следующие виды процессов: - непрерывные; - полунепрерывные; - смешанные; - дискретные. Жизненный цикл объекта – это время от замысла до ликвидации. Стадии ЖЦ: ПР – проектирование, СУ – строительство, ИС – исходное состояние, ГС – горячее состояние, НС – нормальное состояние, ДС – доаварийное состояние, ПС – предаварийное состояние (срабатывание защиты), АС – аварийное состояние, РС – ремонтное состояние, КС – конечное состояние АТК (уничтожение установки или капитальная реконструкция). 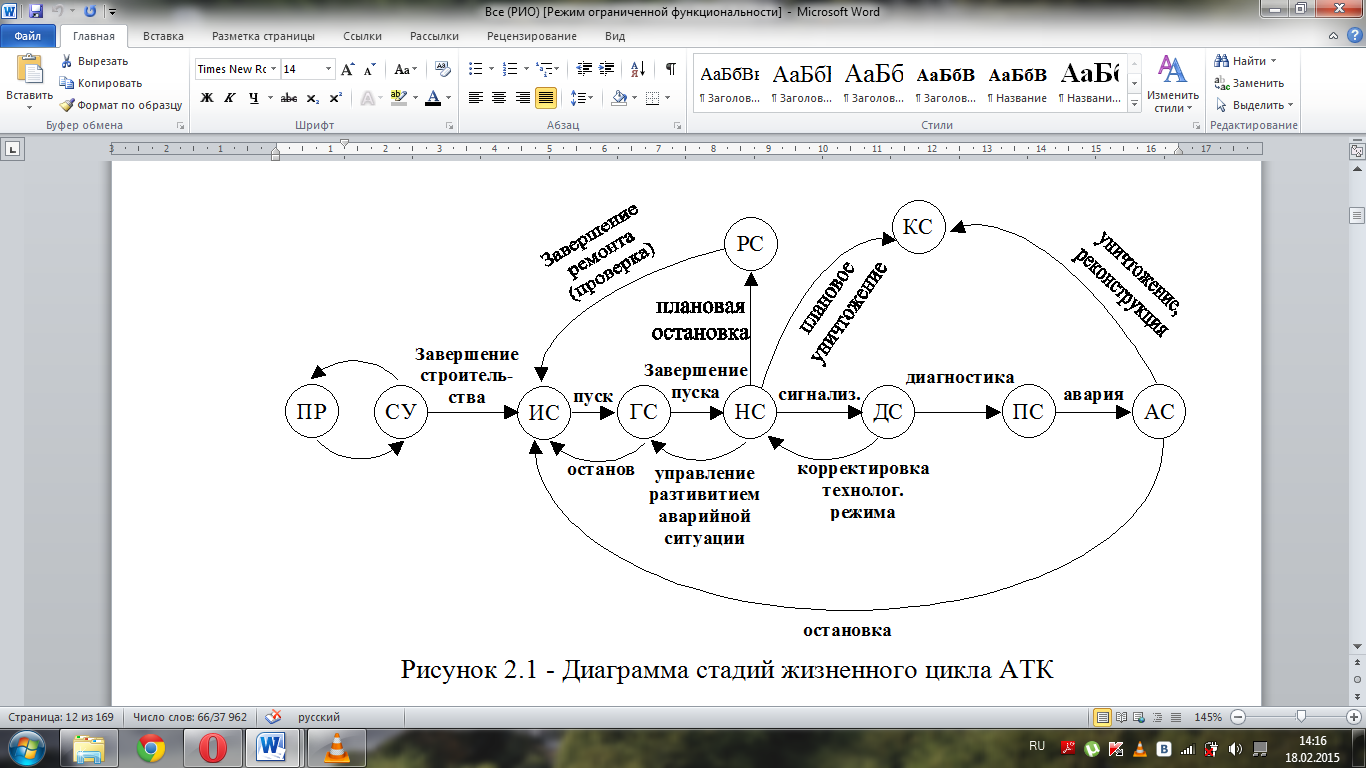 Задачами при проектировании АСУТП являются: 1) на нижнем уровне управления - задачи разработки и оптимизации работы локальных АСР и систем ПАЗ: 2) на втором-третьем уровнях - разработка алгоритмов по решению продвинутых задач управления для штатного режима и обеспечения безопасности при возникновении нештатных ситуаций: 3) разработка алгоритмов пуска и планируемых остановов установок. Цель управления: повышение эффективности упр-ния производством. При оценке эффективности современных технологий управления произ-вом используются решение задач: 1)повышение ТЭ-кой эффективности за счет улучшения процесса сбора, обработки информации. (стоимость, удобство и т.д.) 2)обеспечение безопасности производства. (надежность, безопасность и т.д.) Классификация задач управления технологическими процессами (уровни control и SCADA). Перечислим задачи первого (нижнего) уровня – уровень - задачи подсистем по поддержанию измеряемых технологических параметров на заданном уровне: - сбор информации об измеряемых ТП процесса (А1) - выработка управляющих воздействий на технологический процесс с целью поддержания ТП-ров на заданных значениях (А2) - сигнализация о выходе их за заданные пределы (А3) - блокировка ошибочных действий персонала и управляющих устройств (А4) - ПАЗ процесса по факту аварийных событий (А5) Примерами таких подсистем являются подсистемы поддержания температуры, давления, уровня и т.д. На втором уровне - уровне управления по показателям качества продуктов и эффективности процессов, типичными задачами являются: - вычисление не измеряемых параметров, ПК)продуктов, ТЭП (В1), - сведение материальных балансов (В2), - архивирование информации (В3), - генерация отчетов (В4), - диагностика и защита от сбоев в элементах подсистем нижнего уровня (В5), Перечисленные задачи относят к «продвинутым» (advance). Структура и элементы АСУТП, состав и назначение подсистем, взаимодействие подсистем, («полевое» оборудование, УСО, протоколы обмена, SCADA-пакеты, контроллеры, рабочие станции, сервера, сети, шлюзы и т.д.). АСУТП – это программно-технический комплекс. Состоит из нескольких подсистем: -Подсистемы нижнего уровня для контроля, регулирования и сигнализации. Деятельность этого участка заключается в получении параметров процесса, преобразовании их в соответствующий вид для дальнейшей передачи на более высокую степень, а также в приеме управляющих сигналов и в исполнений действий. -второй уровень – это подсистема диспетчерского управления, управления по ПК, по показателям технико-экономическим. Для выполнений функций данного уровня на контроллерах установлены соответствующие ПО -подсистема обеспечения безопасности, включает подсистемы ПАЗ, диагностики, прогнозирования. Уровень АСУП. Обеспечение «железом» АСУТП идет на основе «полевого уровня» - датчики, ИУ. Далее модули УСО - Для того чтобы связать между собой параметры, представленные в аналоговом/дискретном и цифровом виде. На верхнем уровне это станция оператора – это какие то шлюзы, контроллеры для обмена информацией и передачи на более высокие уровни иерархии. Используются сети (промышленные) и сервера. Напиремр, сеть Ethernet. Далее программное обеспечение. Основные пакеты программ, которые используются в АСУТП: При решении задач реализации (построения) систем управления обычно используются специализированные программные пакеты, которые достаточно условно можно разбить на подмножества: CASE–средства (Computer Aided Software Engineering), предназначенные для программирования задач, реализуемых подсистемами нижнего уровня АСУТП на промышленных микроконтроллерах (ремиконтах); ОСРВ - операционные системы реального времени: pSOS, VRTX, LynxOS, VxWorks, QNX, OS9 и др.; SCADA–системы (Supervisory Control And Data Acquisition), которые предназначены для автоматизированного конфигурирования АСУТП из таких элементов, как микроконтроллеры, компьютеры, технологические станции и т. д., и программирования задач отнесённых к SCADA – уровню; ПТК - программно-технические комплексы: ЭСРВ - экспертные систем реального времени, к числу которых относятся: СУБД – системы управления базами данных; MES – Manufacturing Execution System – системы исполнения производства или технического исполнения плана; MRP-системы (Material Requirements Planning) - автоматизированное планирование потребности в сырье и материалах для производства; MRP II (Manufacturing Resource Planning) – планирование ресурсов предприятия; ERP-системы (Enterprise Resource Planning) планирование/управление ресурсами предприятия с точки зрения бизнеса; EAM-системы (Enterprise Asset Management) управление основными фондами и имуществом. Структура, состав элементов и программно-техническая база (CASE-средства: языки программирования по стандарту МЭК 1131-3) для решения задач управления нижнего (control) уровня и обеспечения безопасности (системы противоаварийной защиты – СПАЗ) производств. 1). CASE–средства (Computer Aided Software Engineering). предназначенные для программирования задач, реализуемых подсистемами нижнего уровня АСУТП на промышленных микроконтроллерах (ремиконтах); Типичная последовательность действий при программировании SCADA-системы: 1 Формирование статического изображения рабочего окна: фон, заголовки, мнемосхема процесса и т.д. 2 Формирование динамических объектов каждого окна. Как правило, динамические объекты создаются с помощью специального графического редактора SCADA-пакета по жестко заданному алгоритму. 3 Описание алгоритмов отображения, управления и т.д. Для этого имеются соответствующие языки программирования. Для программирования контроллеров и SCADA-систем стандартизированы 5 языков програм-ия (МЭК 1131-3): Все языки поддерживаются соответствующим ПО, наиболее распространенным из которых является ISaGRAF фирмы CJ International. Язык FBD- Functional Block Diagrams - язык функциональных блоков. Является графическим языком функциональных блоков (ФБ). Программа для контроллера представляется в виде набора ФБ, соединенных дугами, имитирующими входные, выходные и промежуточные переменные. Пример реализации логической функции y = (x1 AND NOT x2) OR x3.  ЯзыкLD- Ledder Diagrams – язык релейных схем. графический вариант класса языков релейно-контактных схем.Логические выражения описываются в виде реле. Ввиду своих ограниченных возможностей язык дополнен таймерами, счетчиками и т.д.  Язык SFC- Sequential Function Diagrams – последовательности функций, блок-схемы -Относится к графическим языкам программирования и используется для описания алгоритмов в виде функциональных карт. Функциональные карты описывают управляющие последовательности с помощью заранее определенных правил для управляющих действий. Если условие удовлетворено, т.е. соответствующее выражение истинно, происходит переход и система выполняет следующий шаг. Язык ST- Structured Text -Текстовый язык высокого уровня, по синтаксису ориентированный на Pascal. Язык предоставляет булевы и арифметические операторы, а также конструкции структурного программирования: Язык IL -– Instruction List – язык мнемоник, ассемблер/Текстовый язык низкого уровня. Выглядит как язык Ассемблера. Функциональные схемы автоматизации: обозначения, правила изображения систем управления и СПАЗ. Функциональные схемы автоматизации выполняются в соответствии с ГОСТ 21.404-85 «Обозначения условные средств автоматизации» и ГОСТ 21.408-97 «Правила выполнения рабочей документации АТП». Все местные измерительные и преобразовательные приборы изображаются на ФСА в виде окружностей (см. рисунок 7, а и б). 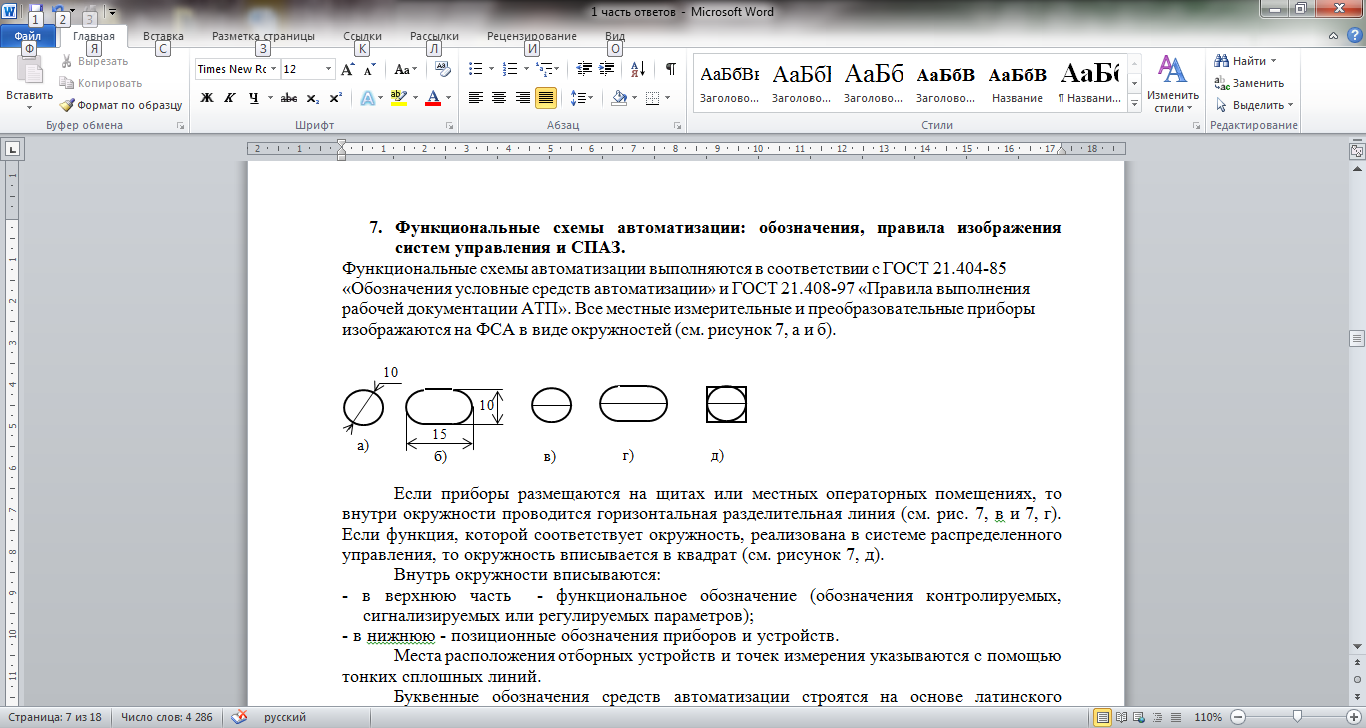 Если приборы размещаются на щитах или местных операторных помещениях, то внутри окружности проводится горизонтальная разделительная линия. Если функция, которой соответствует окружность, реализована в системе распределенного управления, то окружность вписывается в квадрат. Места расположения отборных устройств и точек измерения указываются с помощью тонких сплошных линий. Внутрь окружности вписываются: - в верхнюю часть - функциональное обозначение (обозначения контролируемых, сигнализируемых или регулируемых параметров); - в нижнюю - позиционные обозначения приборов и устройств. Буквенные обозначения средств автоматизации: 1 буква - Контролируемый, сигнализируемый или регулируемый параметр: F - расход, L - уровень, Р - давление, S – скорость, Т – температура и др. 2 буква (не обязательная) - уточнение характера измеряемой величины: D - разность, перепад, F - соотношение, Q - суммирование, интегрирование и др. 3 группа символов (несколько букв) - функции и функциональные признаки прибора: I - индикация, R - регистрация, С - регулирование, S - переключение, А - сигнализация, Е - первичное преобразование параметра, Т - промежуточное преобразование параметра и др. По ГОСТ с «подвалом» Упрощенная схема Развернутая. ПП – первичный преобразователь (чувствительный элемент), НП – нормирующий преобразователь, КР – контроллер (регулятор), ВП – выходной преобразователь 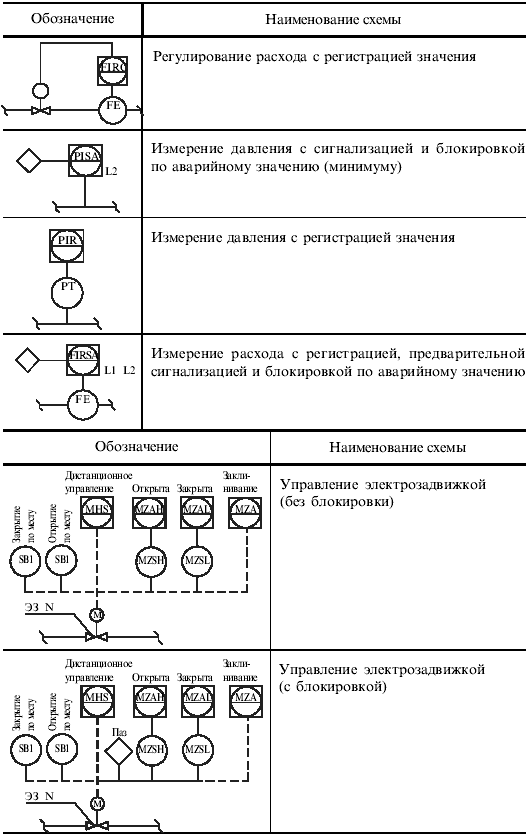 Регулирование расхода с регистрацией значения Измерение давления с сигнал-ей и блок-кой по аварийному значению(min). Регулирование расхода с регистрацией значения Измерение давления с сигнал-ей и блок-кой по аварийному значению(min).Автоматические системы регулирования (АСР). Исходная информация для выбора параметров контроля, регулирования, сигнализации, защиты и блокировки (КРСЗБ) и структуры систем управления. Исходной информацией для выборов параметров КРСЗБ является: Технологический регламент ТЗ Правила безопасности ПБ 09-563-03 и ПБ 09-540-03 Технологический регламент – документ, устанавливающий требования к объектам технологического регулирования. Требования к качеству выпускаемой продукции, к защите процесса и оборудования от аварий, в соответствии с которыми выбирается СУ и назначаются параметры КРСЗБ. В данном документе также берем информацию о параметрах, подлежащих сигнализации, для ПАЗ, но исходя из ПБ. ПБ 09-540-03, приказ №96 устанавливает требования, направленные на обеспечение ПБ, предупреждение аварийных ситуации, случаев травм на ОПО. Уровень взрывозащиты, какой объем автоматизации. Выбор систем контроля, управления и ПАЗ по надежности, быстродействию, допустимой погрешности измерительных систем осуществляется с учетом особенностей технологического процесса и в зависимости от категории взрывоопасности технологических блоков. МЭК 61508 - обоснование системы по надежности и архитектуре СУ. ТЗ - назначение и цели создания системы, характеристика объекта автоматизации, требования к надежности, безопасности. Составляется для конкретного производства. Нормативные документации, которые определяют объем автоматизации, необходимость обоснования тех или иных решений. Построение АСР расхода и соотношения расходов. ТСА, учет шкал при пересчете настроек регуляторов. Пример: Регулирование расхода продукта в трубе (рисунок 3.2)  FE – перв.преобразвотель, в данном случае диафрагма, измеряется перепад давлений. FT – нормирующий преобр-ль, выход 4…20mA, FC-контроллер, вырабатывающий сигнал 4…20mA на FV – выходной преобр-ль. Между Нормир.Преобр-ль и контроллером, контроллером и Вых. Преоб-лем установлен искробезопасный барьер. Запорно-регулирующий клапан. При расчете настроек регуляторов необходимо учитывать, что оптимальные расчетные значения настроек Красч включают коэффициенты усиления ПП, НП, ВП и ИУ. Поэтому коэффициенты собственно регулятора Крег должны рассчитываться по соотношению Крег = Красч / (Кпп Кнп Квп*Киу). (3.1) 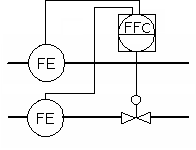 Рисунок 3.3 - АСР соотношения расходов Для АСР соотношения расходов (рисунок 3.3) пересчет коэффициентов с учетом шкал датчиков (измерительных каналов) проводится на основе следующих соотношений: Q1*kд1 = q1[%] – сигнал, посылаемый в регулятор от первой входной величины, Q2*kд2 = q2[%] – сигнал, посылаемый в регулятор от второй входной величины. Если необходимо обеспечить соотношение Q1/Q2 = Ксо, тогда с учетом введенных обозначений в регуляторе (FFC) должен быть установлен коэффициент соотношения k = Ксо (kд2 / kд1). (3.2) Построение АСР давления. ТСА, учет шкал при пересчете настроек регуляторов. 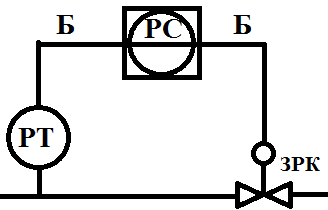 PT – прибор для измерения давления с дистанционной передачей показаний (интеллектуальный Д) – преобразователь давления в электрический сигнал 4…20mA. PT передает сигнал на контроллер PC. РС в свою очередь передает сигнал 4…20mA на FV – выходной преобразователь на открытие или закрытие ЗРК (запорно-регулирующий клапан). При расчете настроек регуляторов необходимо учитывать, что оптимальные расчетные значения настроек Красч включают коэффициенты усиления ПП, НП, ВП и ИУ. Поэтому коэффициенты собственно регулятора Крег должны рассчитываться по соотношению Крег = Красч / (Кпп*Кнп*Квп*Киу). Построение АСР уровня. ТСА, учет шкал при пересчете настроек регуляторов. 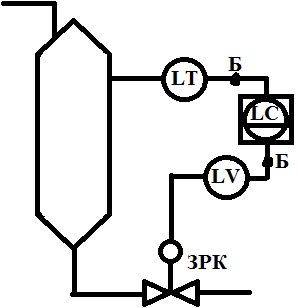 LT – пробор для измерения уровня, емкостный уровнемер, вырабатывает сигнал 4…20mA на контроллер LC. FV – выходной преобр-ль. Между НП и контроллером, контроллером и ВП установлен искробезопасный барьер. Запорно-регулирующий клапан. При расчете настроек регуляторов необходимо учитывать, что оптимальные расчетные значения настроек Красч включают коэффициенты усиления ПП, НП, ВП и ИУ. Поэтому коэффициенты собственно регулятора Крег должны рассчитываться по соотношению Крег = Красч / (Кип*Квп*Киу). Построение АСР температуры. ТСА, учет шкал при пересчете настроек регуляторов. 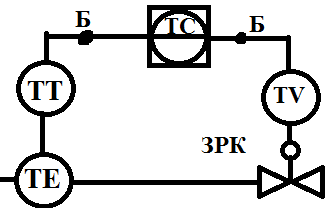 ТЕ-измерительный преобразователь, первичный – термопара ТТ-нормирующий преобразователь, вырабатывает сигнал 4…20mA, ТС – контроллер, выдает управляющий сигнал на ИУ, также вырабатывает сигнал 4…20mA, TV – выходной преобразователь, сигнал от которого идет на ИМ – Запорно-регулирующий клапан. Б - искробезопасный барьер. При расчете настроек регуляторов необходимо учитывать, что оптимальные расчетные значения настроек Красч включают коэффициенты усиления ПП, НП, ВП и ИУ. Поэтому коэффициенты собственно регулятора Крег должны рассчитываться по соотношению Крег = Красч / (Кпп*Кнп*Квп*Киу). Каскадные, комбинированные АСР: условия применения, порядок расчета настроек регуляторов и компенсирующих звеньев, примеры применения. Каскадные АСР применяются на промышленных объектах, характеризующихся большим запаздыванием и значительными возмущениями. А одноконтурные АСР не всегда обеспечивают требуемое качество управления. Организуется два контура регулирования: внутренний, стабилизирующий контур регулирования - осуществляет поддержание промежуточного параметра на значении, которое формируется внешним, корректирующим контуром, который обеспечивает достижение цели регулирования. Внутренний контур менее инерционен, значит ликвидируются возмущения, а неидеальность компенсации компенсируется за счет работы внешнего контура. Задачей регулирования является поддержание заданного значения температуры выхода Твых.  внутренний контур – стабилизирующий (Р-1 - стабилизирующий регулятор), внешний контур – корректирующий (Р-2 – корректирующий регулятор) Настройки регуляторов рассчитываются путем декомпозиции каскадной системы на две эквивалентных одноконтурных исходя из гипотезы динамической независимости внутреннего и внешнего контуров. Настройки стабилизирующего регулятора рассчитывают по ПФ Wоб1 промежуточного объекта (канал «управляющее воздействие - промежуточный параметр»). Настройки корректирующего контура - по ПФ эквивалентного объекта, Wэкв = Wоб2 / Wоб1, где Wоб2 –передаточная функция по каналу «упр-щее воздействие-вых. параметр». По сравнению с одноконтурными каскадные АСР обеспечивают следующие преимущества: существенное (в 1,5 – 20 раз) улучшение качества управления. поддержание управляемого на заданном значении с высокой степенью точности; быструю компенсацию возмущений, воздействующих на стабилизирующий контур Комбинированные системы используются довольно редко, т.к. для большинства объектов нефтепереработки и нефтехимии количество возмущений обычно велико и многие из них не могут быть измерены. Для регулирования уровня в барабане используются так называемые многоимпульсные системы, пример комбинированных систем. Построение комбинированных систем проводится по следующей схеме: 1)синтезируется (оптимизируется) АСР, построенная на основе принципа по отклонению; 2)рассчитываются структура и параметры компенсаторов; Для обеспечения физической реализуемости компенсатора применяется принцип двухканальности Б.Н. Петрова: Для обеспечения инвариантности выхода Y к возмущению f оно должно распространяться в системе не менее, чем по двум каналам. В случае, когда второй канал распространения возмущения организуется путем воздействия на управляющий вход объекта это означает, что должно выполняться условие  , где , где  и и  – передаточные функции объекта по возмущающему и управляющему каналам => – передаточные функции объекта по возмущающему и управляющему каналам => . . 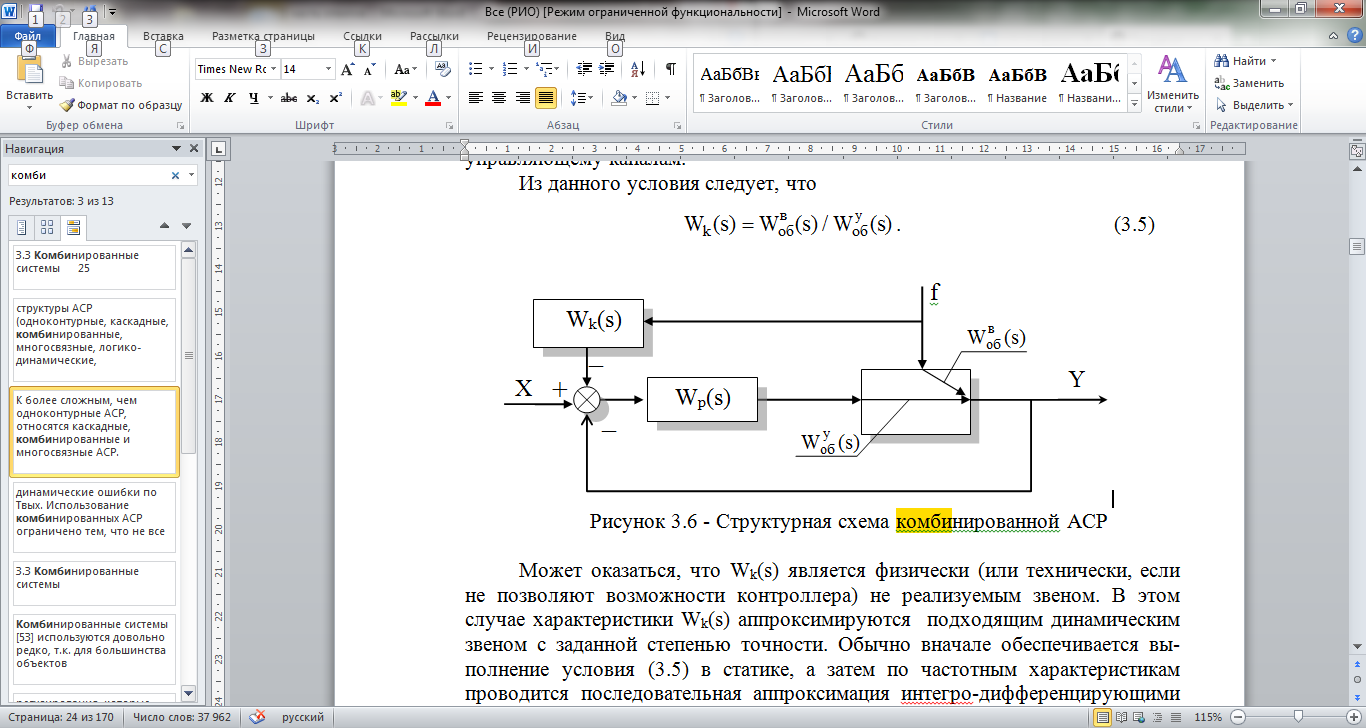 Может оказаться, что Wk(s) является физически не реализуемым звеном. В этом случае характеристики Wk(s) аппроксимируются подходящим динамическим звеном с заданной степенью точности. Понятие о многомерных ТОУ и АСР. Модели, свойства, особенности построения и расчета управляющих устройств. АСР называется многосвязной, если изменение одной регулируемой величины влияет на другие регулируемые величины. Для анализа и синтеза многосвязных систем существуют два вида моделей: 1. Описание в пространстве состояний X(t) = А(t)∙X(t) + B(t)∙U(t);Y(t) = C(t)∙X(t) + D(t)∙U(t) 2 Описание в терминах «вход-выход» Если модели объекта и регулятора – непрерывные операторы, уравнения в терминах вход/выход могут быть записаны в матричном виде Задачи, возникающие при анализе и синтезе многосвязных систем. выбор управляющих воздействий для каждой выходной переменной; анализ силы связности подсистем и влияния на качество управления взаимосвязи между параметрами; синтез (оптимизация) многосвязной системы. Пути решения этих задач. 1.Выбор управляющих параметров проводится на основе анализа функции чувствительности:  ,i, j=1, m. – управл-щий: вход – у которого модуль чувств-ти max. ,i, j=1, m. – управл-щий: вход – у которого модуль чувств-ти max. Вторым фактором, учитывающийся при выборе управления - динамические характеристики каналов передачи воздействий – инерционность каналов «управляющий параметр – выход» должна быть min. |