Автоматизация работы 2-х лопастного ветрогенератора. Курсовая приб тема с лопастями. Автоматизация системы управления ветроэнергетической установки
 Скачать 2.57 Mb. Скачать 2.57 Mb.
|

Глава 2. Описание и реализация устройства2.1 Описание метода «ловли» ветраКак отмечалось ранее, одной из наиболее важных характеристик ветра является его скорость. Различают сглаженную скорость ветра, т. е. некоторую среднюю величину скорости за определенный, обычно небольшой промежуток времени, в течение которого производятся наблюдения, и мгновенную скорость ветра в данный момент (измеряемую прибором, обладающим наименьшей инерционностью). Мгновенная скорость ветра отмечает порывы и внезапное ослабление ветра. Она очень сильно колеблется около сглаженной скорости, временами может быть значительно меньше или больше ее. На метеорологических станциях обычно измеряют сглаженную скорость ветра. Скорость воздуха является весьма важным параметром состояния атмосферы и одной из главных характеристик воздушного потока, которую необходимо учитывать при проектировании, монтаже, наладке и контроле ветросистем. Лопасти ветрогенератора начинают вращаться и приводить в движение вал генератора даже при незначительной силе ветра. Такая чувствительность ветроустановок не всегда приводит к установлению требуемого режима работы ветрогенератора. Поскольку ветер может не достигать требуемого уровня скорости, то на валу генератора не может развиться достаточный для выработки электроэнергии вращающий момент. Это ведет лишь к дополнительным нагрузкам на механические узлы ветроустановки, изнашиванию элементов конструкции. Чтобы избежать нагрузок подобного рода, поворот лопастей будет осуществляться таким образом, что при низких значениях скорости ветра, угол атаки лопастей будет максимальным. При возникновении порывистых ветров система должна реагировать должным образом. Так при достижении критических значений скорости ветра система должна автоматически обеспечивать поворот лопастей во флюгерное положение, уменьшая угол атаки, предотвращая разгон колеса и предохраняя ВЭУ от повреждений и снижая нагрузки на ветроколесо. Данный вариант является наиболее безопасным для защиты ветроустановок от нагрузок, превышающих допустимые. Другие методы, связанные с созданием противодействующего момента за счет торможения генератором являются потенциально опасными как для ВЭУ, так и для жизни людей. Таким образом, проектируемая система должна обладать характеристиками, позволяющими одновременно решать задачи разного характера. Она должна учитывать и мгновенно реагировать на суточные изменения направления ветра, определять значения мгновенной и сглаженной скорости, а также подавать сигналы на исполнительные органы в соответствии с заданными условиями и требованиями. 2.2 Имитация в среде Matlab SimulinkМного зарубежных работ посвящено исследованию проблематики систем управления поворотом лопастей. Разработаны универсальные методы и алгоритмы управления. Однако использование комплексных средств моделирования дает возможность доработать алгоритмы систем управления для дальнейшего применения на конкретном объекте. На Рис. 6. показана модель ветрогенератора и системы управления поворотом лопастей, собранная в среде Matlab Simulink. В модель заложены характеристики ветра, конструкции основных узлов ветрогенератора и системы управления. Динамическую модель ветра и ветрогенератора можно связать с контроллером системы управления с помощью технологии OPC (OLE for Process Control). Тем самым спрогнозировать поведение ветрогенератора и системы управления для заданных характеристик. 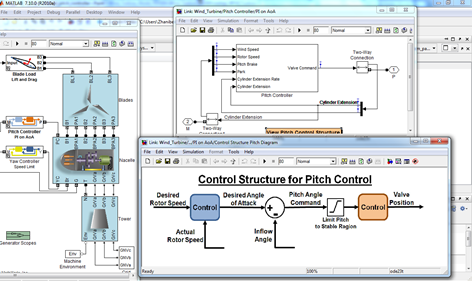 Рис. 6.- Модель ветрогенератора и системы управления поворотом лопастей собранная в Matlab Simulink На Рис. 7. отображена модель в режиме работы с выводом графиков, показывающих основные параметры, использующиеся в системе управления поворотом лопастей. 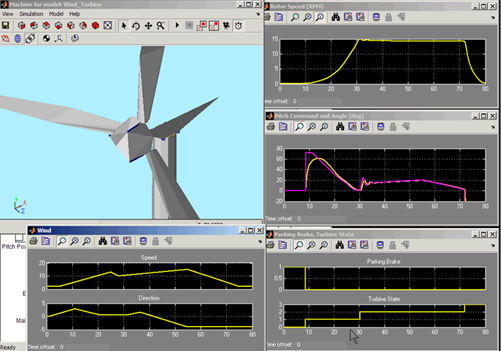 Рис. 7 -. Работающая модель ветрогенератора и системы управления поворотом лопастей в среде Matlab Simulink На графиках (Рис. 7) при очень низкой скорости ветра ветрогенератор находится в состоянии «парковки», скорость вращения ротора составлет 0 об/мин. С увеличением скорости ветра и при достижении рабочего значения, тормозная система освобождает ротор. Система управления поворотом лопастей увеличивет угол атаки, обеспечивая увеличение выходной мощности и скорости вращения ротора до номинальных значений. После достижения ветрогенератором номинальных значений работы система управления поворотом лопастей держит скорость вращения ротора постоянной. 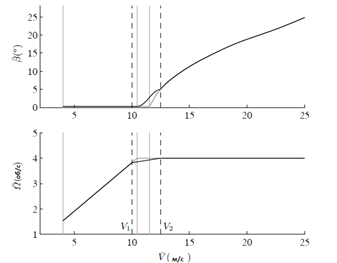 Рис. 8.- Зависимость скорости вращения ротора и угла атаки лопастей от скорости ветра Таким образом, система управления поворотом лопастей позволяет максимизировать выходную мощность и существенно снизить динамические нагрузки на конструкцию ветрогенератора. |