Автоматизированные системы управления атомных электростанций 2
 Скачать 1.06 Mb. Скачать 1.06 Mb.
|

Декомпозиция алгоритмов управления и сбора информации в технологическойсистеме.Общепризнанным направлением в развитии архитектур современных и перспективных АСУ ТП АЭС является распределённость и децентрализация управления технологическими процессами. Каждая технологическая подсистема или установка в составе системы имеет контур локального управления (регулирования, стабилизации), функцией которого является поддержание некоторого параметра в соответствии с заданным значением. Принаступления нового события (выхода некоторого параметра за пределы порогового значения) во многих практически важных ситуациях существует несколько вариантов стабилизации процесса. В простых случаях система управления вычисляет новые значения уставок и сообщает их оператору, который принимает решение об их применении. В сложных случаях действия оператора не поддаются формализации и их результат зависит от опыта и искусства оператора. Процесс решения сложной задачи довольно часто сводится к решению нескольких более простых подзадач. Соответственно при разработке сложного алгоритма он может разбиваться на отдельные алгоритмы, которые называются вспомогательными. Ка ждый такой вспомогательный алгоритм описывает решение ка кой-либо подзадачи. Процесс построения алгоритма методом последовательной де тализации состоит в следующем. Сначала алгоритм формулирует ся в «крупных» блоках (командах), которые могут быть непонят ны исполнителю (не входят в его систему команд) и записывают ся как вызовы вспомогательных алгоритмов. Затем происходит детализация, и все вспомогательные алгоритмы подробно распи сываются с использованием команд, понятных исполнителю. Алгоритмы управления и сбора информации в технологическисистеме целесообразно разделить на семь параллельно работающихгрупп алгоритмов (автоматов) (рис. 3.3). 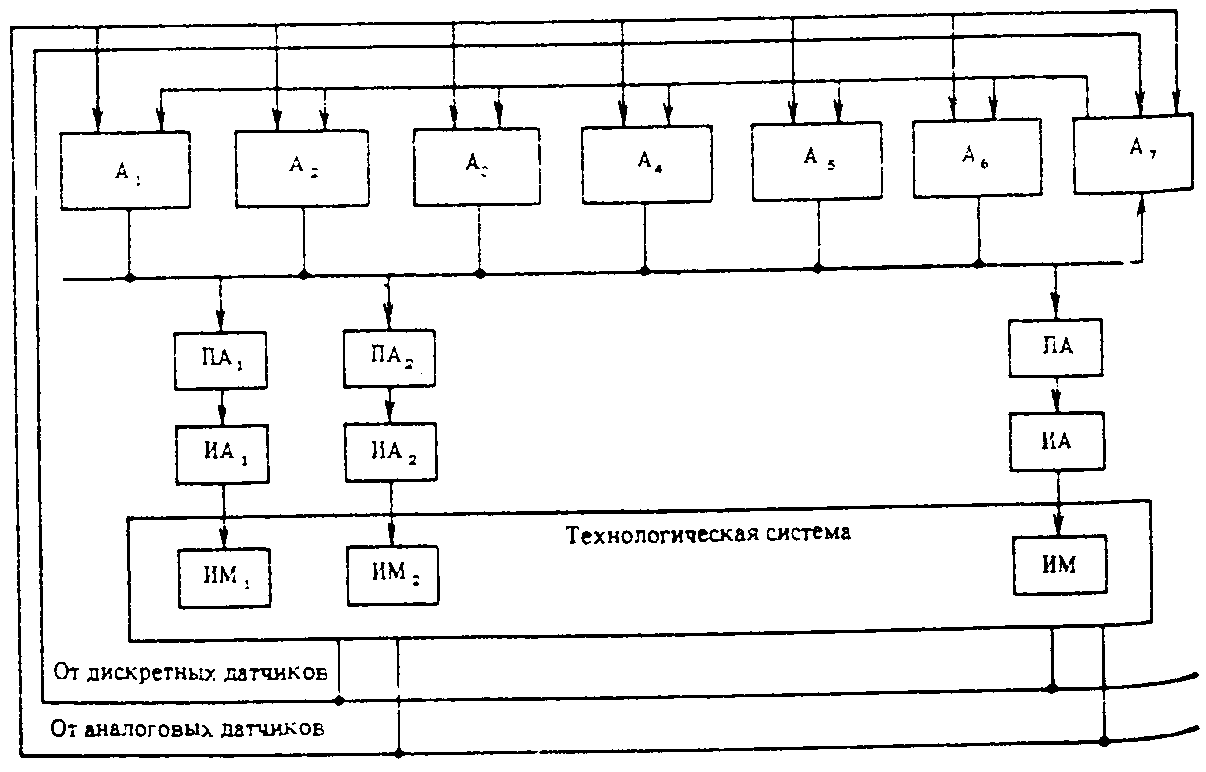 Рис. Схема управления технологической системой. 1. Аварийные защиты А1описывают ситуации, соответствующие ядерной или пожарной опасности, и действия (команды) на исполнительные механизмы (ИМ), направленные на предотвращение со здавшейся ситуации [ос,- (x)hL', в схеме на рис. 3.2]. 2 Технологические защиты А2описывают ситуации, угрожающие —сохранности технологического оборудования, и действия (команды) на исполнительные механизмы, направленные на предотвращение разрушения оборудования [р (х)\- [7;- в схеме на рис. 3.2]. 3. Технологические блокировки А3(одношаговые или многоша говые) определяют действия (операции) над исполнительными ме ханизмами для поддержания технологических параметров (темпе ратуры, давления, расхода и т. д.) на заданном уровне или в задан ии пределах. Другое название алгоритмов А3- программно-логическое управление. 4. Дистанционное управление от оператора А4 - действия и усло вия их осуществления над исполнительными механизмами по коман дам от оператора. 5. Регуляторы А5- автоматы, осуществляющие поддержание не которого технологического параметра в соответствии с заданием (управлением) по одному из законов (П, ПИ, ПИД). С точки зрения реализации автоматы А5- это множество вычислительных проце дур, реализующих заданный закон регулирования (П. ПИ, ПИД и т.д.) и условия включения и отключения регулятора. 6. Информационные автоматы формирования событий А6- это процедуры, задающие правила установления факта события по каждому параметру, исполнительному механизму и алгоритмам управ ления A1 - A5. 7. Диагностические автоматы А7 - процедуры, осуществляющие функции первичной локальной диагностики исполнительных меха низмов, датчиков, локальных процессов. Каждый автомат А1 - А5представляет собой набор параллельно непротиворечиво работающих процедур, вырабатывающих управляющие воздействия на исполнительные механизмы. Автоматы А1- А7 работают также параллельно, и детерминизм воздействия обеспечивается на основе арбитража в соответствии с приоритета ми в специальных блоках,- приоритетных автоматах {ПА), команды от последних поступают в исполнительные автоматы (ИА), осуществляющие управление элементарными операциями исполнительных механизмов. Последние блоки одинаковы для всех исполнительных механизмов одного типа. Общая схема управления технологической системой. Каждый томат А1-А5независимо от других просматривает собственную базу данных, содержащую текущие значения сигналов от датчиков объекта, сигналы от других систем либо команды от оператора, и по ним вычисляет предварительные управляющие воздействия на собственные исполнительные механизмы, которые поступают на приоритетные автоматы, а последние вырабатывают управляющие bojдействия или сохраняют предыдущие. Реализация дистанционного управления в рассматриваемой схеме осуществляется также на уровне управления технологической системой, поэтому помещать его на уровень (блок) операторского интерфейса нецелесообразно. Процедуры А6 работают одновременно с остальными автоматами осуществляют информационную связь системы управления технологической системой с другими компонентами АСУ ТП, для этого: устанавливается факт смены состояния любого дискретного входа (выхода) функции и формируется соответствующее сообщение (телеграмма) в систему коммуникации (дискретное событие); фиксируется изменение любого непрерывного параметра (температуры, давления и т. д.) на заданное с точки зрения точности значение и по этому факту устанавливается параметрическое событие и формируется соответствующая телеграмма в систему коммуникации). |