Автоматизированные системы управления атомных электростанций 2
 Скачать 1.06 Mb. Скачать 1.06 Mb.
|

Классификация процессов функционирования энергоблока АЭС. Типовые алгоритмы управления.Классификация процессов функционирования энергоблока: стационарные процессы — поддержание параметров, обеспечивающих про ектную работу технологического оборудования; многократные, систематически повторяющиеся технологические процес сы — поддержание водно-химического режима, борное регулирование, вывод/ ввод оборудования в соответствии с графиком ремонта и т.п.; однократные длительные технологические процессы при нормальной экс плуатации — пуск и останов энергоблока; быстропротекающие процессы с нарушением условий нормальной эксплу атации — отключение части оборудования; быстропротекающие процессы при возникновении исходных событий про ектных аварий. В зависимости от режима функционирования существенно меняется содер жание задач управления. Так, при работе в режимах пуска и останова энерго блока, изменения мощности задачей системы управления является проведение переходных режимов с требуемым качеством и в определенных временных ин тервалах. Основной задачей при этом является обеспечение безопасного управ ления энергоблоком. При работе в базовом режиме задачей системы управления является под держание требуемого стационарного состояния на неограниченном интервале времени. Основная задача — стабилизация режима и поддержание динамиче ского баланса мощностей в элементах энергоблока. Алгоритм управления, его структура и параметры зависят не толь ко от задачи управления, но и от того объекта, которым предстоит управлять. Многообразие объектов управления, не поддающихся ти пизации, отсутствие единой четкой классификации задач управления затрудняют классификацию алгоритмов управления. Для упрощенного представления можно выделить среди алгорит мов управления две наиболее обобщенные и укрупненные группы: алгоритмы управления состоянием и сменой состояний. К первым могут быть отнесены алгоритмы поддержания заданного рациональ ного либо предварительно рассчитанного оптимального значения тех нологического параметра. Они получили название алгоритмов стабилизации или регулирования. Среди них выделяют регулирование по отклонению координаты и регулирование по возмущению. К этой груп пе могут быть отнесены также алгоритмы статической оптимизации, когда управляющее устройство автоматически осуществляет поиск та кого сочетания значений технологических параметров, при котором достигается наилучшее (оптимальное) значение некоторого крите рия качества функционирования объекта управления. Если для достижения оптимального критерия качества необходимо задавать недопустимые значения параметров объекта управления, то формируются предельно допустимые алгоритмы, обеспечивающие наибольшее приближение к оптимуму. К алгоритмам второй группы следует отнести алгоритмы отработ ки заданной рациональной или заданной оптимальной траектории -алгоритмы программно-следящего управления. К ним также могут быть отнесены алгоритмы отработки заданной рациональной или опти мальной дискретной последовательности смены технологических опе раций, образующей технологический цикл. В отличие от перечисленных алгоритмы динамической оптимиза ции обеспечивают автоматический выбор оптимальной траектории или ее формирование, коррекцию в процессе отработки в зависимос ти от меняющихся условий таким образом, чтобы сохранить наилуч шее значение критерия качества функционирования. Наиболее современным и перспективным является оптимальное уп равление, которое хотя и является обычно наиболее трудно реализуе мым, но зато дает наибольший технико-экономический эффект. Реше ние задач оптимального управления по существу стало реальным в свя зи с применением в системах автоматизации микропроцессоров и ми ни-ЭВМ.
Основными функциями типового регулятора являются усилениесигнала рассогласования и формирование корректирующих сигналов от ошибки, ее производной и интеграла ошибки. Различают несколько разновидностей регуляторов в зависимости от алгоритма формирования корректирующего сигнала: пропорциональный (П-регулятор), интегральный (И-регулятор), пропорционально-интегральный (ПИ-регулятор), пропорционально-дифференциальный (ПД-регулятор), пропорционально-интегрально-дифференциальный (ПИД-регулятор). Опишем характеристики и параметры настройки типовых ре гуляторов. • П-регулятор имеет статическую линейную характеристику, пе чаточная функция его равна кр. П-регулятор безынерционно реа гирует на ступенчатое воздействие. • И-регуляторимеет передаточную функцию вида гдеТ — постоянная времени интегрирования. На входной единич ный ступенчатый сигнал И-регулятор реагирует линейным сигна лом, причем за время Т выходной сигнал достигает единицы. • ПИ-регулятор имеет двухпараметрическую передаточную функцию вида где кр, Ти — коэффициент передачи и время изодромасоответственно. ПИ-регулятор является астатическим регулятором, он совмещает в себе свойства П- и И-регуляторов, его реакция на единичное воз действие представляется мгновенным скачком величины кри пос ледующим линейно растущим сигналом с наклоном Ти/кр. • ПД-регулятор имеет передаточную функцию вида где к , Т — коэффициент передачи и время упреждения соответствен но, ПД-регулятор в стационарном режиме ведет себя как пропорци ональное звено, но при изменении вход ного сигнала вырабатывает дополнительную составляющую, соответствующую производ ной от входного сигнала. Переходная функ ция регулятора приведена на рис. 5.3, а. 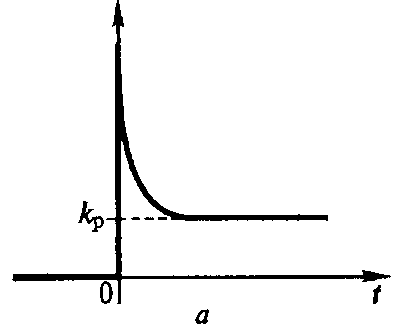 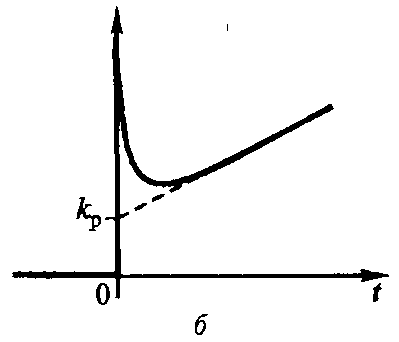 • ПИД-регулятор имеет трехпараметри-ческую передаточную функцию вида где кр, Г, ТИ — коэффициент передачи, вре мя упреждения и время изодромасоответ ственно. Структурная модель ПИД-регулятора может быть представлена и в мульти пликативной форме Переходная функция регулятора приведена на рис. 5.3, б. Лога рифмическая амплитудная частотная характеристика ПИД-регулятора имеет симметричный вид относительно своей среднечастотной части, наклон в низкочастотной части составляет —20 дБ/дек и 20 дБ/дек в высокочастотной части характеристики, средние час тоты подавляются. |