Автоматизированные системы управления атомных электростанций 2
 Скачать 1.06 Mb. Скачать 1.06 Mb.
|

Классификация объектов тепловой энергетики по параметру регулирования и их математическое описание.Если в основу классификации положить пара метр регулирования, то объекты регулирования тепловой энергетики можно подразделить на несколько групп, каждая из которых, в качестве регулируемого параметра соответственно имеет угловуюскорость вращения ротора, давление газа или пара в ресивере, уровень жидкости в резервуаре, температуру в камере и т.д. Каждая из этих групп регулируемых объектов описываетсяоднотипными уравнениями движения. Первая группа. Равновесный режим работы объектов, отнесен ных к данной группе, обеспечивается равенством крутящего мо мента Мд0, вырабатываемого машиной на равновесном режиме моменту Мс0потребителя (сопротивления) на этом же режиме! Уравнение равновесного состояния (уравнение статики) таких объектов имеет вид Мд0 = Мс0.(34) Нарушение равновесного состояния, например в связи с изме нением нагрузки, приводит к появлению разницы в значениях крутящих моментов машины и потребителя. Отклонение объекта от равновесного состояния вследствие изменения указанных мо ментов отражается в уравнении динамики объекта. Разница мо ментов расходуется на ускоренное или замедленное вращение ротора, поэтому где J— приведенный момент инерции ротора объекта, принимаемый постоянным; (£> — угловая скорость (выходная координата объекта); Мди Мс— измененные значения моментов двигателя и по требителя. Вторая группа. Объекты, относящиеся ко второй группе, пред ставляют собой ресивер определенного объема с коммуникациями подвода и отвода газа. Уравнение статики таких объектов получает вид   Четвертая группа. Регулируемым объектом этой группы может быть камера, в которой необходимо поддерживать заданное значение температуры. Условие равновесного состояния объекта (уравнение статики) — равенство (на равновесном режиме) подводимого Если равновесное состояние нарушено, то уравнение динамики позволяет определить количество тепла, аккумулируемое в данной камере:  где ск — теплоемкость камеры в ккал/град. Приведенные выше уравнения динамики регулируемых объектов однотипны и легко подчиняются обобщенной энергетической форме:  где В — постоянная объекта; у — регулируемый параметр; Еги E2 — подводимая и отводимая энергии.
Особенностью реального управления многими инерционны ми технологическими процессами, такими как процесс регулирования давления, расхода, уровня, температуры, является апериодичность переходных характеристик. Увеличение количества емкостей, составляющих регулируемый объект, приводит, очевидно, к соответствующему увеличению по рядка дифференциального уравнения, описывающего процесс раз гона для регулируемой величины в последней из емкостей при возмущении на входе в объект Переходный процесс многоемкостного теплового регулируемого объекта за редким исключением описывается дифференциальными уравнениями, характеристические уравнения которых имеют лишь действительные корни. Поэтому процессы разгона в них протекают апериодически, а их кривые разгона являются суммами экспонент (рис. III. 8, кривые 2, 3, 4) и имеют характерную «S-образную» форму. Чем больше составляющих емкостей имеет регулируемый объект при прочих равных условиях, тем более полого идет кривая разгона в начале процесса и тем длительнее его течение (кривые 3 и 4 рис. III. 8). При отсутствии самовыравнивания в регулируемом объекте форма кривых разгона будет несколько иной (рис./III. 9). В этом случае любая из кривых будет уходить в бесконечность, становясь, при достаточном удалении от начала процесса, пря молинейной. 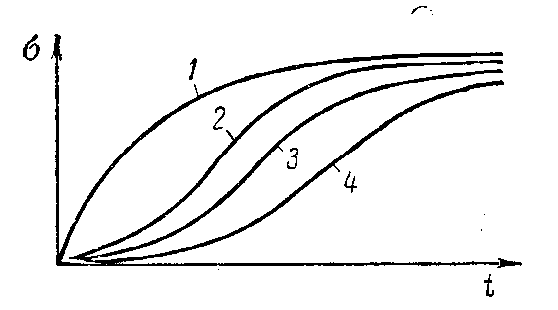 Рис. III. 8. Характеристики разгона многоемкостных объектов при нали чии самовыравнивания. Цифры на рисунке соответствуют числу емко стей объекта 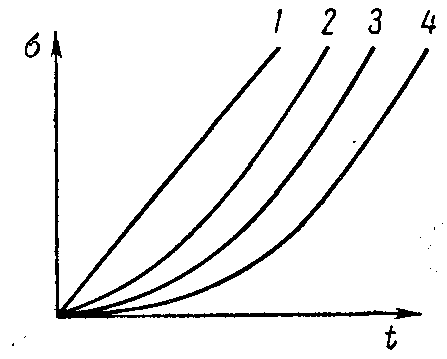 Рис. III. 9. Характеристики разгона многоемкостных объ ектов в отсутствии самовы равнивания. Цифры на ри сунке соответствуют числу емкостей объекта Общий вид экспериментальных переходных кривых таких процессов характеризуется тремя основ ами параметрами: Т, г, V — постоянной времени, временем отставания и скоростью нарастания соответственно, а простейшей обобщенной моделью является модель. 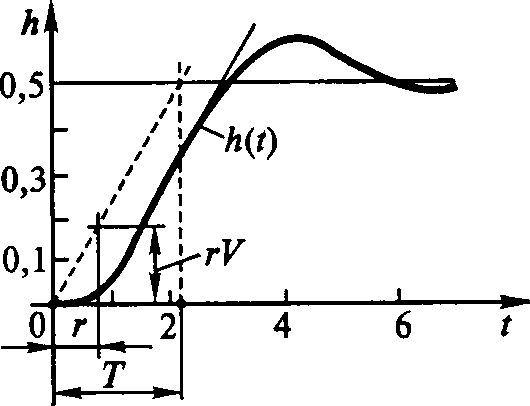 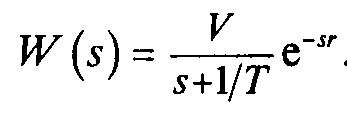 Если к кривой разгона многоемкостного объекта (рис. III. 12) провести касательную в точке ее перегиба (или в бесконечности в случае отсутствия самовыравнивания рис. III. 13), то эта каса тельная отсечет на оси времени некоторый отрезок, обозначаемый те и называемый емкостным запаздыванием. Из кривых рис. III. 8, III. 9 легко видеть, что емкостное запаздывание при прочих равных условиях тем больше, чем большее число емкостей составляет регулируемый объект. В точке перегиба (или в беско нечности для объектов, лишенных самовыравнивания) скорость изменения регулируемой величины является наибольшей. Следо вательно, в соответствии с определением скорости разгона, данной в § 1 и 3, скорость разгона многоемкостного регулируемого объ екта может быть определена по углуа наклона касательной в точке перегиба к кривой разгона. Конечное отклонение регулируемой величины окопределяется степенью самовыравнивания регулируемого объекта и равна ее обратной величине при единичном ступенчатом возмущении. Та ким образом, течение процесса разгона многоемкостного регули руемого объекта, а, следовательно, и его кривая разгона прибли женно характеризуются тремя величинами — скоростью раз гона е, степенью самовыравнивания q и величиной времени емкост ного запаздывания те. В очень большом числе случаев в тепловых регулируемых объ ектах имеет место так называемое чистое или транспортное запаздывание т0. Оно обусловливается тем, что с момента нанесения возмущения и до того момента, когда регулируемая величина начнет изменяться, должно пройти некоторое время, затрачивае мое на перемещение регулируемой среды от места нанесения воз мущения до места измерения регулируемой величины. Это явле ние хорошо видно на гидравлической модели одноемкостного объекта с запаздыванием (см. рис. II. 20), При регулировании уровня воды в баке (рис. II. 20) возмущение в виде изменения подачи воды на стороне притока изменяет подачу воды в открытый желоб, по которому вода и подается в бак. Время запаздывания здесь зависит от длины и наклона желоба. 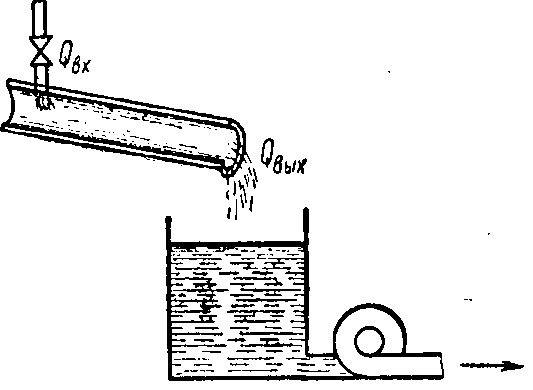 Рис. II. 20. Конструктивная схема запаздывающего звена Таким образом, типовая характеристика разгона сложного (много емкостного) теплового регулируемого объекта имеет характерный вид, изображенный на рис. III. 12 и III. 13. Сумма транспортного и емкостного запаздываний т0 + те = т (III. 11) называется полным или условным запаздыванием. Подводя итоги, мы можем отметить следующие основные осо бенности сложных тепловых регулируемых объектов: а) процессы разгона в подавляющем большинстве сложных тепловых регулируемых объектов протекают апериодически и, сле довательно, их разгонные характеристики монотонны; б) колебания, проходя через тепловые регулируемые объекты, отстают по фазе от входных колебаний и уменьшаются по своей амплитуде по мере возрастания их частоты; в) амплитудно-фазовые характеристики тепловых регулируе мых объектов в комплексной плоскости представляют собой спи рали, закручивающиеся около начала координат, т. е. около точки, соответствующей бесконечно большой частоте колебаний; г) тепловые регулируемые объекты являются низкочастотными фильтрами и не пропускают практически колебаний, у которых частота равна или больше некоторой частоты среза соер; д) подавляющее большинство сложных тепловых объектов об ладает кроме емкостного также и транспортным запаздыванием. 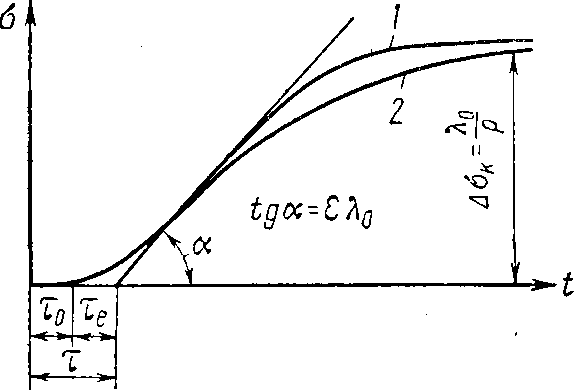 Рис. III. 12..Кривая разгона сложного объекта с самовыравниванием / и ап проксимация ее апериодическим звеном с транспортным запаздыванием т, рав ным сумме емкостного те и действи тельного транспортного т0 запаздыва ний. |