реферат блок согласования. Блок согласования БС-АЛС. Блок согласования бсалс системы саутцм485
 Скачать 366.7 Kb. Скачать 366.7 Kb.
|

|
Федеральное агентство железнодорожного транспорта федеральное государственное бюджетное образовательное учреждение высшего образования «Омский государственный университет путей сообщения» (ОмГУПС (ОмИИТ)) Кафедра «Подвижной состав электрических железных дорог» Реферат по дисциплине: «Безопасность движения поездов» на тему: «Блок согласования БС-АЛС системы САУТ-ЦМ/485» Выполнил: ст. гр. Проверил: О  мск 2018 г. мск 2018 г.СодержаниеВведение 3 1Система автоматического управления тормозами поезда САУТ 4 2Блок согласования БС-АЛС системы САУТ-ЦМ/485 12 Заключение 14 Список литературы 15 ВведениеРазработанные «Научно-производственным объединением САУТ» автоматические системы управления локомотивами и движением поездов полностью исключают риск аварий из-за ошибок машиниста. «НПО САУТ» было образовано на базе отдела Уральского отделения ВНИИЖТ в 1994 году и с тех пор добилось больших успехов в разработке и внедрении микропроцессорных систем автоматического управления торможением поездов (САУТ-ЦМ), микропроцессорных систем управления локомотивом (МСУЛ), стабилизированных источников бортового электропитания (ИП-ЛЭ) и сервисной контрольно-проверочной аппаратуры для обслуживания перечисленных систем. Система автоматического управления тормозами поезда САУТНа сегодняшний день система АЛСН является наиболее распространенным средством, которое обеспечивает условия безопасности движения поездов. Хотя аппаратура АЛСН исключают проезд сигнала с запрещающим показанием, но экстренное торможение поезда при АЛСН происходит только после проезда этого светофора (запрещающего). Да и само по себе применение экстренного торможения влечет за собой значительные негативные последствия: значительные нагрузки на ПС, вследствие ударных механических воздействий; возможность травмирования пассажиров и т.д. Еще один значительный «минус» АЛСН – это невозможность контролировать снижение скорости поезда в местах, где действуют ограничения. И поэтому выбор скоростного режима в таких условиях возлагается на машиниста. Но не зависимо оттого, что машинист имеет определённые знания и большой опыт работы, не исключены ошибки, которые он может допустить при управлении поездом. При возникновении таких ошибок условия безопасности движения поездов выполняться не будут, так как аппаратура АЛСН не может предотвратить последствий ошибок машиниста, которые связаны с потерей бдительности, поздним включением тормозов, не точным определением расстояния до впереди стоящего светофора или по причине неправильного прогнозирования траектории движения поезда. Все это говорит о необходимости применения систем автоматического управления движением поездов и в первую очередь – системы автоматического управления тормозами (САУТ). При этом необходимо исключить проезд сигналов с запрещающим показанием путём прицельного торможения с плавным регулированием скорости движения поезда во всем диапазоне – от максимальной до нулевой. На рисунке 1.1 изображена траектория движения поезда при прицельном торможении перед закрытым сигналом. 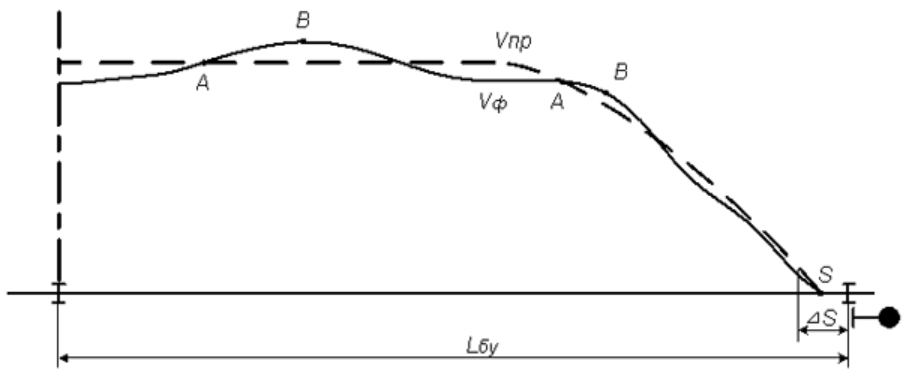 Рисунок 1.1 – траектория движения поезда при прицельном торможении перед закрытым сигналом На основании информации о профиле пути, длине блок-участка Lбу и тормозных характеристик поезда система САУТ определяет max-но допустимую программную скорость движения поезда Vпр. Во время следования поезда САУТ производит измерение фактической скорости Vф, сравнивает ее с программной скоростью и в случае необходимости воздействует на тормозные и тяговые средства поезда. Для наглядности изложения, рассмотрим в упрощенном виде процессы воздействия элементов САУТ на тормозные и тяговые средства поезда в движении. На рисунке 1.2 изображены траектории, показывающие движение поезда по блок-участку. Программная траектория движения показана пунктирной линией, а фактическая траектория – сплошной линией. Из графика видно, что если фактическая скорость на блок-участке меньше программной (Vф < Vпр), то система САУТ никак не воздействует на процесс ведения поезда. Допустим, из-за сложившейся поездной ситуации машинист начинает увеличивать скорость Vф и её величина станет приближаться к значению программной скорости Vпр. Когда Vф достигнет значения (Vпр-2) км/ч, на графика это точка «А» (рисунок 2.2), исполнительными элементами САУТ отключится тяга локомотива. Если же, например, на спуске, скорость поезда будет продолжать увеличиваться и начнет превышать программную, то при значении Vф = (Vпр+2) км/ч, на графике это тока «В», исполнительными элементами САУТ включит служебное торможение. Но могут быть случаи, когда и после включения служебного торможения Vф поезда не приводится к Vпр. В таком случае при достижении Vф = (Vпр+6) км/ч включится экстренное торможение. В соответствии с программной траекторией движения, поезд должен остановиться в точке прицельного торможения Sпт. Любое управляюще-измерительное устройство, в том числе и аппаратура САУТ, имеет определенные погрешности соответствующих исполнительных воздействий и вычислений. Поэтому абсолютно точно в заранее заданной точке перед закрытым светофором произвести остановку поезда невозможно. Диапазон расстояний DS (на рисунке 1.2) определяет погрешность системы или область допустимого изменения положения точки прицельной остановки поезда S. Для недопущения проезда сигнала с запрещающим показанием правая граница области S не должна пересекать ординату изолирующих стыков светофора «Ч1». Из всего этого следует, что основное функциональное назначение аппаратуры САУТ заключается в отслеживании фактической скорости поезда, формировании программной траектории движения и осуществлении воздействий на тормозные и тяговые средства поезда, если Vф > Vпр. В случаях, когда Vф < Vпр, элементы устройства САУТ не оказывают влияния на процесс ведения поезда. И еще один значительный «плюс» системы САУТ заключается в том, что если произошла остановка поезда или снижение скорости по заданному ограничению автоматически – аппаратурой САУТ (не машинистом), то этот момент не фиксируется ни какими регистрирующими приборами. Тем самым исключается негативное психологическое влияние работы САУТ на машиниста. Локомотивная аппаратура система автоматического управления тормозами поезда САУТ-ЦМ/485К организована на интерфейсе RS485 и состоит из комплекта блоков и изделий, собранных в систему. Блоки (ПМ, ПУ, БС-ЦКР, БК/кас., БС-ДПС-БЗС, БС-КЛУБ и БЦП), участвующие в обмене информации собраны последовательно вдоль линии интерфейса RS485. Схема электрическая общая САУТ-ЦМ/485 показана на рисунке 3.2. Необходимую для работы информацию САУТ получает через блоки и изделия (Ан-САУТ-УМ, ДПС-У, БС-КЛУБ, ДД) поставляемые в комплекте САУТ, а также от цепей управления электровозом. Применяется и другая конфигурация САУТ, в которой вместо блоков БЦП и БК/кас. устанавливается блок БЭК3, (совмещает БЦП и БК/кас.). Сведения о параметрах электровоза и база данных путевых параметров размещены в ПЗУ модуля блока центрального процессора на съемной кассете БЦП (БЭК3). Перед каждой поездкой кассета устанавливается в кассетоприем-ник БЦП (БЭК3) и вынимается после поездки. БЦП принимает сигналы блоков аппаратуры САУТ, производит их обработку по программе, записанной в ПЗУ кассеты, и вырабатывает управляющие сигналы для блока коммутации БК/кас. и других периферийных блоков аппаратуры САУТ. Кассетоприёмник БЦП осуществляет бесконтактную, двунаправленную передачу информации в кассету. В БЦП имеется два уровня регистрации параметров: РПС1 и РПС2. РПС1 размещен в кассете и фиксирует работу САУТ в течение поездки локомотивной бригады, при смене локомотива машинист извлекает кассету и переносит её в кассетоприёмник БЦП на вновь принимаемый локомотив. РПС2 размещен в кассетоприемнике БЦП и фиксирует работу САУТ на данном локомотиве. 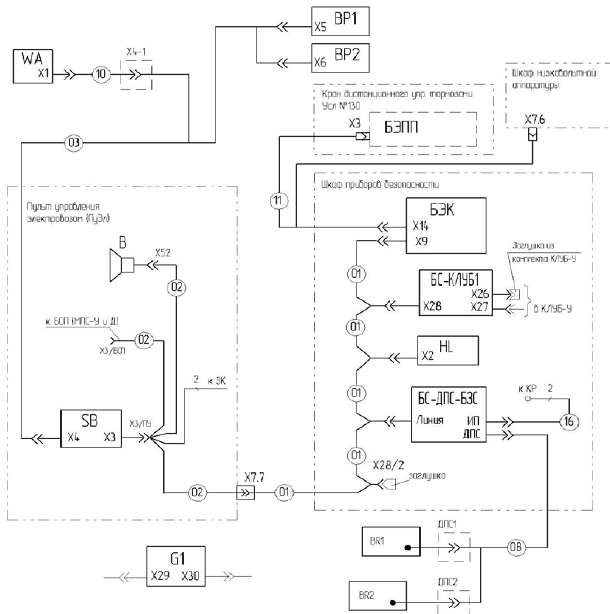 Рисунок 1.2 - Схема электрическая общая САУТ-ЦМ/485 Пульт машиниста (ПМ) и пульт управления (ПУ) не являются основными в использовании при работе с САУТ, поскольку показания отображаемые на ПМ дублируются на блоке индикации БИЛ, а функции кнопок ПУ дублируются на клавиатуре БВЛ-У КЛУБ-У, которая является основной системой безопасности установленной на электровозе. К основным принципам работы относятся: контроль движения и автоматическое управление торможением САУТ осуществляет из кабины, в которой производится управление электровозом; контроль за движением поезда осуществляется постоянно путем сравнения фактической скорости движения Уф и допустимой (программной) Удоп; контроль за движением поезда по сигналам светофоров; автоматическое управление торможением, на основе поступающей информации с выдачей следующих команд: последовательно «ОТКЛЮЧЕНИЕ ТЯГИ, «ПЕРЕКРЫША», «СЛУЖЕБНОЕ ТОРМОЖЕНИЕ», а также «ЭКСТРЕННОЕ ТОРМОЖЕНИЕ»; измерение фактической эффективности пневматического тормоза (ПТ). Формирование допустимой скорость движения Удоп. с учетом тормозного коэффициента Зр. САУТ производит измерение Зр при каждом торможении поезда, при наличии путевых устройств САУТ; отображение информации на пульте машиниста ПМ-САУТ и блоке индикации БИЛ КЛУБ-У: фактической скорости движения Уф, допустимой скорости движения Удоп, расстояние до конца блок участка, величины тормозного коэффициента Зр и «ЗАПРЕЩЕНИЕ ОТПУСКА»; сопровождение работы при различных поездных ситуациях информацией в виде речевых сообщений; контроль самопроизвольного (неконтролируемое) начало движения. По команде «ОТКЛЮЧЕНИЕ ТЯГИ» сигнал по линии связи поступает в МСУЛ, под управлением которого производится разбор схемы тягового режима электровоза. По команде «ПЕРЕКРЫША» осуществляется подготовка тормозной схемы к последующему торможению путем обесточивания отпускного электромагнитного вентиля ОВ приставки электропневматической ПКМ. По команде «СЛУЖЕБНОЕ ТОРМОЖЕНИЕ» осуществляется ступень служебного торможения с разрядкой ТМ на величину (0,07 ±0,02) МПа путем обесточивания тормозного вентиля ТВ ПКМ. По команде «ЭКСТРЕННОЕ ТОРМОЖЕНИЕ» обесточивается катушка электропневматического клапана (ЭПК). САУТ контролирует движение поезда и выполняет управляющие функции в следующих поездных ситуациях: движение по «зелёному» показанию БИЛ. Осуществляет контроль фактической скорости Уф. При скорости Уф=(Удоп-2) км/ч выдает речевое сообщение «Отключи тягу», при скорости Уф=Удоп разбирает схему тягового режима, при скорости Уф=(Удоп+3) км/ч выполняет служебное торможение. САУТ вычисляет величину максимально допустимой скорости движения Удоп по «зеленому» показанию как Удоп =Утах +2 км/ч, где Утах - максимальная скорость движения по «зеленому» показанию БИЛ на данной дороге (участке дороги); движение по «жёлтому» показанию БИЛ. В начале блок-участка САУТ контролирует максимально допустимую скорость. Исходя из длины блок-участка, уклона, тормозной эффективности и фактической скорости САУТ вычисляет тормозной путь, необходимый для снижения скорости до Укж. На расстоянии, необходимого тормозного пути до светофора, разбирает схему тягового режима и выполняет ступень служебного торможения, обеспечивающую разрешённую скорость Укж проследования светофора. САУТ вычисляет величину максимально допустимой скорости Удоп.кж проследования светофора по «желтому» показанию как Удоп.кж=(Укж+2) км/ч, где Укж - разрешённая скорость проследования путевого светофора с «желтым» показанием на данной дороге (участке дороги); движение по «красно-жёлтому» показанию БИЛ. В начале блок-участка контролирует разрешённую скорость Укж. Исходя из длины блок-участка, уклона, тормозной эффективности и фактической скорости САУТ вычисляет тормозной путь необходимый для остановки перед светофором с запрещающим показанием в точке прицельной остановки (от 10 м до 150 м перед светофором). На расстоянии необходимого тормозного пути разбирает схему тягового режима и выполняет служебное торможение до остановки поезда перед светофором с запрещающим показанием; движение по «жёлтому» показанию БИЛ к входному светофору станции с двумя «желтыми огнями». В начале блок-участка контролирует максимально допустимую скорость. На расстоянии необходимого тормозного пути до светофора разбирает схему тягового режима и служебным торможением снижает скорость до скорости проследования входного светофора. Величина этой скорости вычисляется САУТ в зависимости от величины ограничения скорости движения по стрелочному переводу и расстояния от стрелочного перевода до входного светофора, но не превышает скорости Удоп.кж; движение по станционному пути к выходному светофору с запрещающим показанием. При движении по станционному пути САУТ разбирает схему тягового режима на расстоянии необходимого тормозного пути до начала ограничения скорости и осуществляет служебное торможение до величины ограничения скорости по станционному пути. При движении по станционному пути к выходному светофору с запрещающим показанием САУТ контролирует превышение установленного ограничения скорости, а на расстоянии необходимого тормозного пути служебным торможением обеспечивает остановку перед светофором с запрещающим показанием; при смене показания БИЛ на более разрешающее. Снимает ограничение скорости и переходит к программе соответствующей этому показанию БИЛ; при самопроизвольном начало движения на расстояние более 3 м в режиме выбега. САУТ выдаёт речевое сообщение « Внимание, начало движения « и не более чем через 10 сек. выполняется служебное торможение. Для недопущения торможения за указанное время после речевого сообщения следует кратковременно нажать РБ. Движение электровоза под контролем прибора безопасности САУТ сопровождается следующими речевыми сообщениями: Внимание. Впереди переезд. Впереди мост. Впереди путепровод. Сигнал. Впереди переход. Впереди платформа. Впереди токораздел. Впереди нейтральная вставка. Проба тормозов. Впереди тоннель. Впереди ПОНАБ. Впереди газопровод. Внимание! Начало движения. Белый. Впереди зеленый. Впереди желтый. Впереди красный. Красный. Отключи тягу. Впереди станция. Впереди опасное место. Внимание! ПОНАБ, красный. Внимание! ПОНАБ, желтый. ПОНАБ, зелёный. Блок согласования БС-АЛС системы САУТ-ЦМ/485Блок согласования с АЛС, БС-АЛС (рис. 2.1) предназначен для обработки сигналов вырабатываемых аппаратурой АЛСН и КЛУБ, передачи обработанных сигналов в локомотивную аппаратуру САУТ-ЦМ через линию связи, выполненную по стандарту RS-485.  Рисунок 2.1 – Блок согласования с системой САУТ БС-КЛУБ Технические параметры:Диапазон рабочих температур, °С -50 …+50 Номинальное напряжения питания, В 15 ± 1,5 Потребляемая мощность, Вт ≤ 1,5 Предельно допустимое входное напряжение на входах «З», «Ж», «КЖ», «К», «Б», «1РБ», «2РБ», «ИФ» отрицательное постоянное напряжение, В≤ 60 положительное постоянное напряжение, В≤ 75 Импульсные напряжения отрицательной и положительной полярности амплитудой, В 160 ± 20 длительностью, мкс 10- 40 частотой, Гц 50 ± 5 Пороги напряжений на входах «З», «Ж», «КЖ», «К», «Б», «1РБ», «2РБ», «ИФ», В 15...35 Минимальное дифференциальное напряжение на выходах 485А и 485В лог. «1» при Rнагр = 27 Ом, В ≥ 1,5 Максимальное дифференциальное напряжение на входах 485А и 485В, лог. «0» В ≤ 0,2 Входное сопротивление по входам 485А и 485В, кОм 12 Габаритные размеры, мм ≤125×80×58 Масса, кг ≤ 0,4 Средняя наработка на отказ, ч ≥ 50 000 ЗаключениеСтабилизированные источники бортового электропитания ИП-ЛЭ внедряются на сети дорог с 1996 года для электропитания локомотивных устройств безопасности САУТ, КЛУБ, радиостанций, а также МСУЛ, унифицированных пультов машиниста. По состоянию на 01.01.2002 г. поставлено около 3000 штук ИП-ЛЭ. В текущем году по договорам с МПС и железными дорогами осуществляется поставка 1200 штук ИП-ЛЭ. Поставщик аппаратуры «НПО САУТ» в кооперации с ГУП ПО «Октябрь» г. Каменск-Уральский и НПО «Автоматика». Анализ безопасности движения поездов за длительный период показывает, что проезды запрещающих сигналов и превышение установленных скоростей имеют статистически устойчивый характер и вызывают крушения и аварии с наиболее тяжелыми последствиями. Проезды запрещающих сигналов допускаются машинистами в среднем один раз на 100 млн. км пробега подвижного состава и являются причинами более половины всех крушений и аварий на железнодорожном транспорте. Микропроцессорная система автоматического управления торможением поездов САУТ-ЦМ, разработанная Уральским отделением ВНИИЖТ, исключает проезды запрещающих сигналов и превышение допускаемых скоростей в поездной работе. Список литературыКассета регистрации. руководство по эксплуатации РЭ Всего страниц 16. Согласовано Актом приёмочной комиссии от 29 июля 2009г Безопасность в чрезвычайных ситуациях на железнодорожном транспорте / В. М. Пономарев - Москва: МИИТ, 2013 г. 229 с. Системные меры по обеспечению безопасности движения поездов в Дирекции тяги: утверждены 09 января 2013 г. / Открытое АО «Российские железные дороги», Дирекция тяги - фил. ОАО «РЖД». - Москва: Техинформ, 2013. - 60. |