Изучение методики модального управления линейными динамическими объектами в пространстве состояний.. ЛБ_1_ТАУ. Цель работы Изучение методики модального управления линейными динамическими объектами в пространстве состояний. Исходные данные
 Скачать 115.81 Kb. Скачать 115.81 Kb.
|

|
Цель работы Изучение методики модального управления линейными динамическими объектами в пространстве состояний. Исходные данные Вариант 4 Исходными данными по варианту являются 3 матрицы A, B и C:
 Ход и выполнение работы Для обоснования возможности модального управления воспользуемся критерием управляемости. Для этого в Matlab воспользуемся функцией ctrb для построения матрицы управляемости и вычислим ее детерминант. Система является управляемой, если детерминант не равен нулю. Листинг программы поиска детерминанта: A=[-60.8 -107 -34.7; 35 60 19; -10 -16.7 -5.3]; B=[0.228; -0.127; 0.038]; C=[35000 105000 140000]; MU=ctrb(A,B); det(MU) Результат выполнения программы: ans = 0.0102 Определитель матрицы не равен нулю, следовательно, критерий управляемости выполняется. С целью получения перерегулирования 0% необходимо опытным путём подобрать значения вектору желаемых полюсов P:  ; ;который задает желаемое расположение полюсов системы с помощью команды acker. Для получения масштабирующего коэффициента системы можно воспользоваться командой dcgain. Поделив единицу на установившееся значение системы можно получить масштабирующий коэффициент, позволяющий устранить установившуюся ошибку системы. Для получения перерегулирования в 30%, необходимо задаться комплексными корнями, поскольку система имеет склонность к колебаниям, если характеристическое уравнение содержит комплексные корни η1,2= –α ± jβ. Колебательность системы определяется по формуле:  (1) (1)По значению колебательности можно оценить перерегулирование:  (2) (2)Необходимо, чтобы уровень перерегулирования составлял 30%. Следовательно, имеем:     Таким образом, примем вектор, задающий желаемое расположение полюсов P при перерегулировании 30%:  Результаты работы Код в MATLAB: A=[-60.8 -107 -34.7; 35 60 19; -10 -16.7 -5.3]; B=[0.228; -0.127; 0.038]; C=[35000 105000 140000]; MU=ctrb(A,B); det(MU); P=[-5 -5 -5]; k=acker(A,B,P); yust=dcgain(ss(A-B*k,B,C,0)); km1=1/yust km1 = 0.0042 // Выполняем запуск модели в Matlab Simulink, получаем график для 0% перерегулирования; используем Gain «km1» >> P2=[-5 -1+j*2.61 -1-j*2.61]; k=acker(A,B,P2); yust=dcgain(ss(A-B*k,B,C,0)); km2=1/yust km2 = 0.0013 // Выполняем запуск модели в Matlab Simulink, получаем график для 30% перерегулирования; используем Gain «km2» На рисунке 1 изображена система с обратной связью, построенная в пакете Matlab Simulink.  б) a) 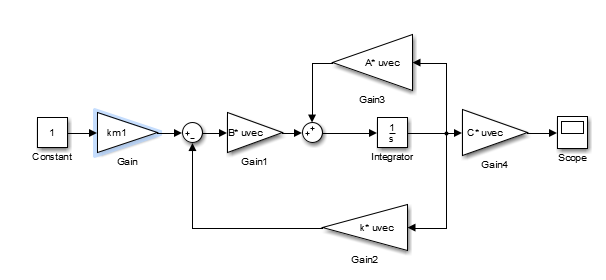 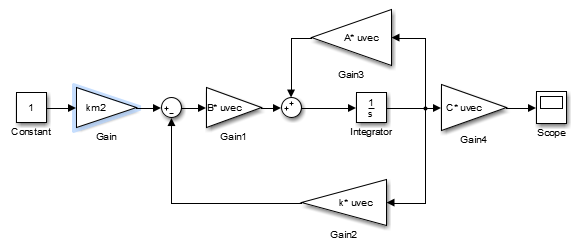 Рис.1 – Система с обратной связью, построенная в пакете Matlab Simulink а) с перерегулированием 0%; б) с перерегулированием 30% На рисунках 2 и 3 изображены графики переходных процессов с нулевым перерегулированием, и перерегулированием 30% соответственно.  Рис. 2 – График переходного процесса с нулевым перерегулированием 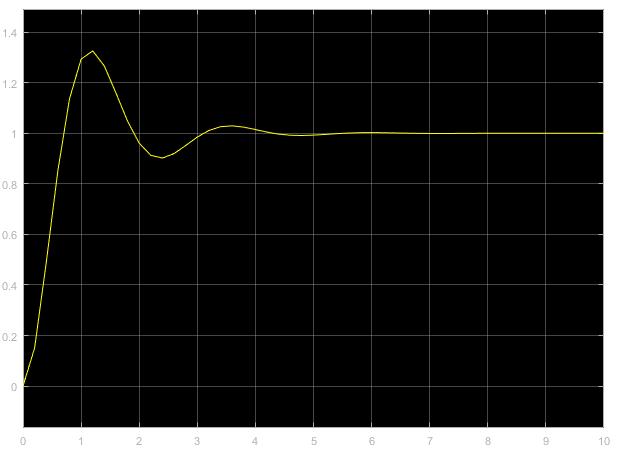 Рис. 3 – График переходного процесса с перерегулированием 30% Выводы В ходе выполнения лабораторной работы были изучены методики модального управления линейными динамическими объектами в пространстве состояний. Были приобретены навыки в построении системы с заданным уровнем перерегулирования. |