ЭОП. Дисциплина Электрооборудование промышленности содержание
 Скачать 3.9 Mb. Скачать 3.9 Mb.
|

|
7. Управление координатами в электроприводе переменного тока с фазным ротором. Управление координатами в электроприводе переменного тока с фазным ротором. управление производится путем переключения сопротивлений в цепи ротора с помощью релейно-контакторных схем: Увеличение сопротивления в цепи ротора двигателя приводит к увеличению критического скольжения П 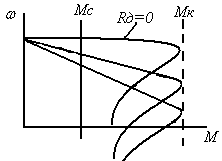 реимущества: широкий диапазон регулирования, простота реализации, возможность получения большого пускового момента, равного критическому. реимущества: широкий диапазон регулирования, простота реализации, возможность получения большого пускового момента, равного критическому.Недостатки: потери электроэнергии ( Расчет сопротивлений добавочных резисторов:
Методы повышения эффективности управления координатами асинхронного двигателя с фазным ротором:
1)  2) 2)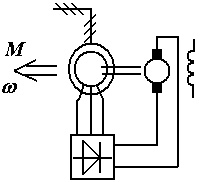
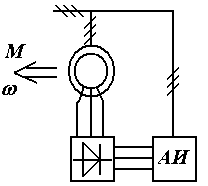
При замыкании электронного ключа сопротивление цепи ротора уменьшается и скорость увеличивается. Для плавной регулировки скорости электронный ключ работает в ШИМ. Реактор L уменьшает ЭДС самоиндукции и пульсации тока;
Преимуществами такой схемы являются получение абсолютно жестких механических характеристик как у синхронного двигателя:  В данной схеме требуется меньшая мощность преобразователя частоты при такой же мощности двигателя, по сравнению с АД с короткозамкнутым ротором. 8. Основные характеристики и режимы работы электропривода переменного тока. Основные характеристики:
При увеличении скольжения ротора и нагрузки на валу АД – вращающий момент возрастает за счет увеличения тока ротора до критического значения, а затем уменьшается за счет уменьшения Наиболее удобные формулы для механической характеристики были выведены немецким ученым Клоссом в зависимости от энергетических соотношений в двигателе. Рассмотрим энергетические соотношения в АД:
Формула Клосса:  , где: , где:
Энергетические режимы работы асинхронного двигателя: 1 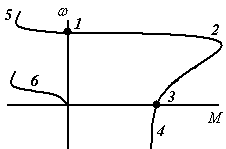 – холостой ход; – холостой ход;2 – двигательный режим; 3 – короткое замыкание (якорь заторможен); 4 – торможение противовключением (или перемена питания двух фаз); 5 – рекуперативное торможение; 6 – динамическое торможение (к двум фазам подключают постоянный ток (30÷40 В)). 9. Электрическая часть силового канала электропривода. Преобразователи частоты в электроприводе. Общие сведения: В состав электрической части ЭП входит: 1. Источник питания Источником питания чаще всего может быть электрическая сеть f =50 Гц, и с одним из линейных напряжений Uном = 220, 380, 660 В; 1, 6, 10 кВ. В городском электротранспорте применяется сеть с U =600 В, (в ж/д U =5 кВ). В автономных установках, на автомобилях, самолетах и судах применяются аккумуляторы и генераторы тока с U =12, 24, 48 В. На летательных аппаратах применяются генераторы переменного тока с f =400 Гц и U =115, 200, 36 В. За счет увеличения частоты уменьшается масса эл. оборудования. В электрическую часть силового канала ЭП также входит Эл. преобразователь и электрическая часть электромеханического преобразователя. Классификация электрических преобразователей. Электрические преобразователи предназначены для преобразования электроэнергии исключительно по роду тока (пост. в перем. и наоборот), амплитуде и частоте напряжения. Преобразователи делятся на
Независимо от напряжения, преобразователи могут быть: управляемые и неуправляемые, реверсивные и нереверсивные. От вида внешней характеристики могут рассматриваются источники или источники 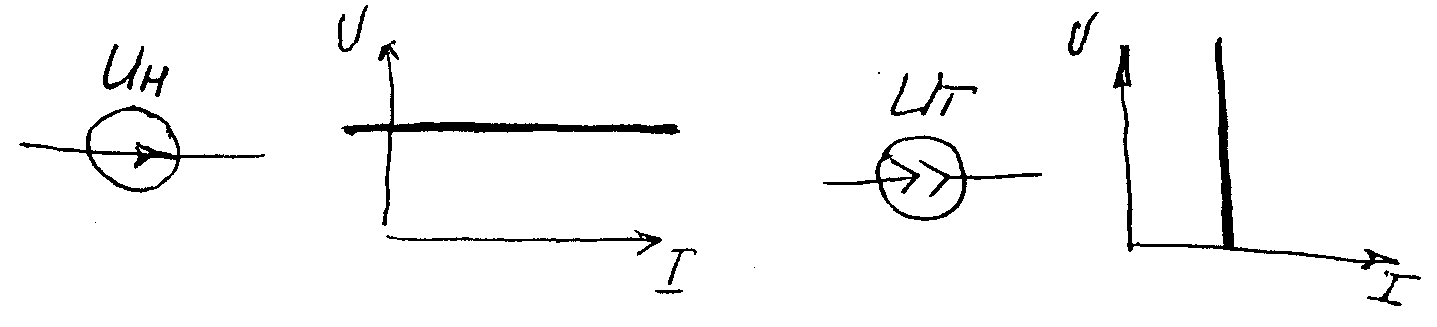 Преобразователи частоты в ЭП. 1). НПЧ – непосредственные преобразователи частоты Содержат в каждой фазе неуправляемый реверсивный выпрямитель 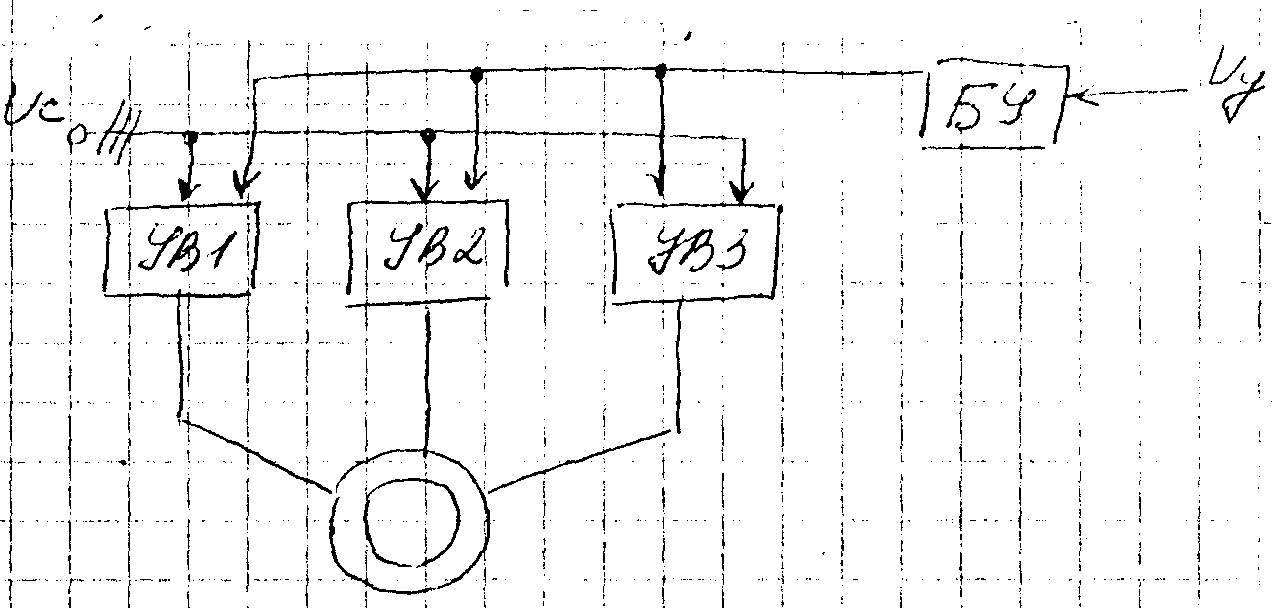 Основное преимущество НПЧ является:
ПЧВС: P ≤ 20 МВт, η = 0,95 – 0,97 т. к. имеет место однократное преобразование энергии Недостатки:
  Для регулирования действующего значения выходного напряжения изменяется угол управления тиристоров . 2). ПЧ с ЗВТ – преобразователи ЧП частоты со звеном постоянного тока. Бывают с: А). управляемым выпрямителем Б). неуправляемым выпрямителем P ≤ 2 МВт. Схема с управляемым выпрямителем. 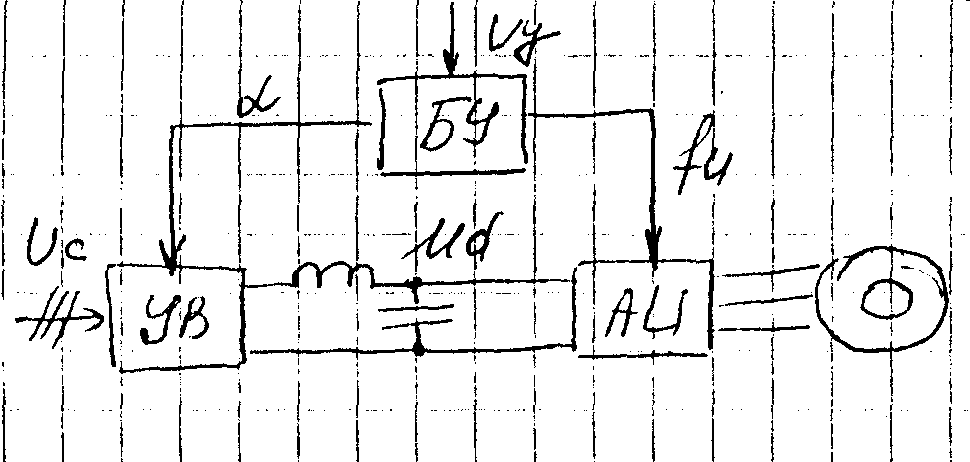 Напряжение сети выпрямляется и регулируется УВ на 6-ти тиристорах (мостовая схема). Автономный инвертор на 12-ти тиристорах и 12-ти диодах преобразует постоянное напряжение в переменное, с f до 250 Гц, Преимущества:
Недостатки:
Блок управления БУ, одновременно изменяет угол управления, управляемых выпрямителей и частоту управляющих импульсов тиристоров АИ. 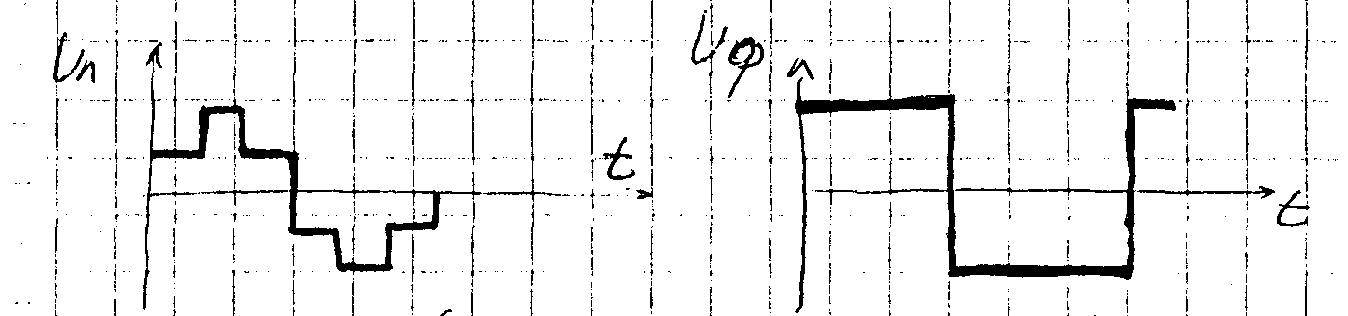 Линейное U фазное U Схема с неуправляемым выпрямителем Имеет наилучшие характеристики, т. е. η = 0,95-0,97 и cosφ → 1. Они построены на биполярных транзисторах с полевым затвором Регулировании выходного напряжения производится с помощью синусоидальной ШИМ частотой f = 5 – 15 кГц. 10. Импульсные преобразователи в электроприводе. ИППТ предназначены для преобразования тока по величине. Они состоят из электронных ключей на тиристорах или транзисторах, и могут быть нереверсивные и реверсивные. Применяются в быстродействующих ЭП По принципу действия делятся на 3 группы:
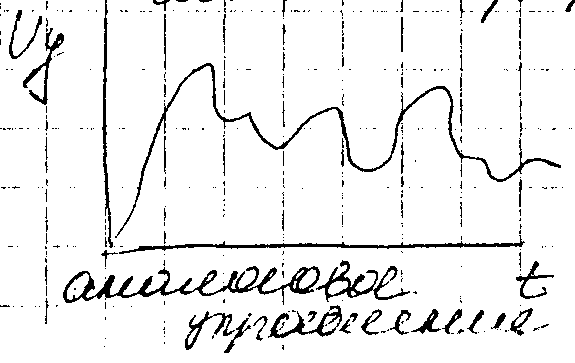
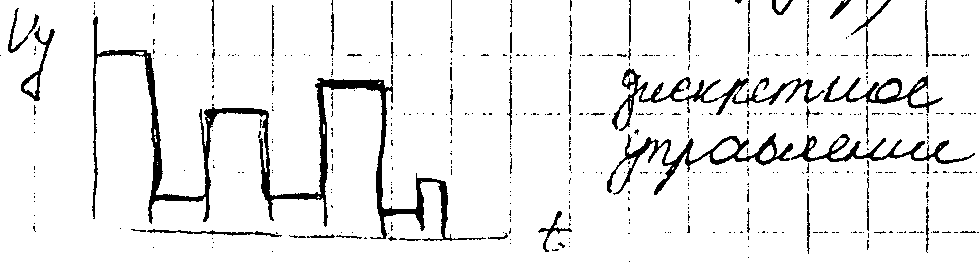
Передаточная функция соответствует апериодическому звену Наибольшее распространение получили: ИППТ с ШИМ, из за простоты управления и фильтрации выходного напряжения. 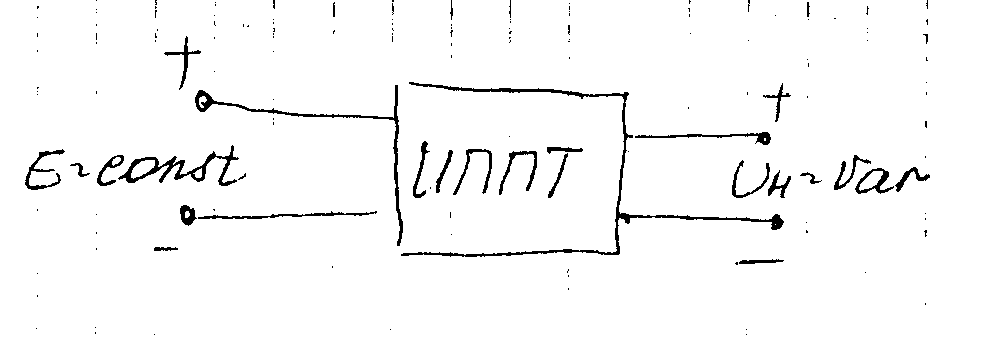 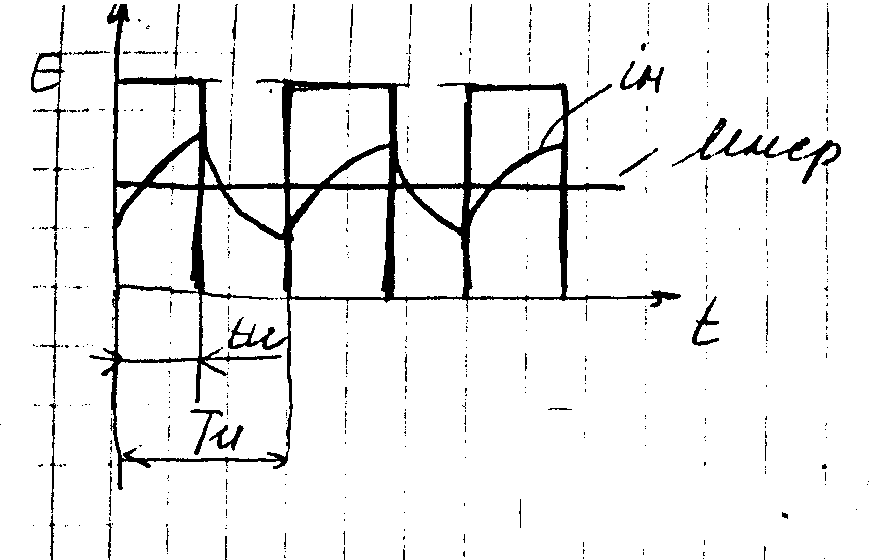 При ШИМ изменяется только длительность импульсов tи При ЧИМ изменяется период и частота следования импульсов (Ти и fи) При КИМ изменяется и длительность импульсов (fи), и период (Ти) Рассмотрим простейшую схему ИППТ на тиристорах. 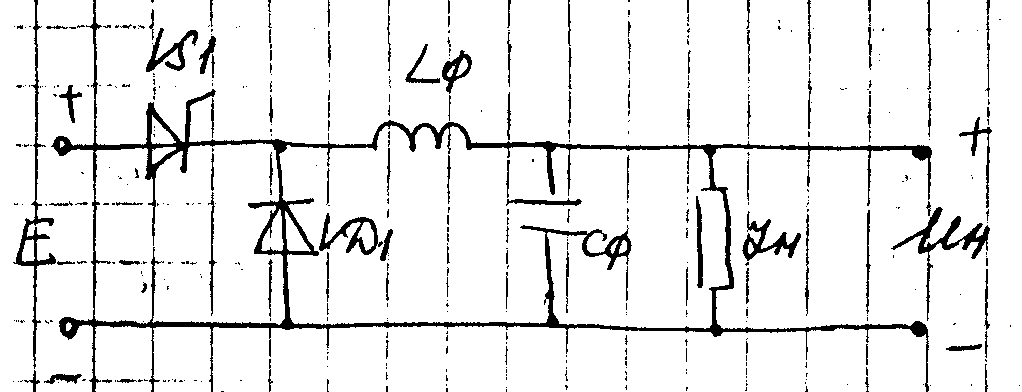 Для сглаживания выходного напряжения чаще всего используют LC - фильтры Диод VD1 обеспечивает протекание тока нагрузки при запирании тиристора VS1. Ток изменяется по экспоненте с постоянной времени, равной: 11. Общие принципы управление и классификация систем управления электроприводом. Управление в ЭП это – организация преобразования электрической энергии в механическую энергию, при котором реализуется требования алгоритма функционирования и изменения управляемых координат. Алгоритм функционирования определяется требуемым характером технологического процесса. Он может быть представлен в виде блок-схемы алгоритма, словесного описания, а также в виде нагрузочных диаграмм и тахограмм. Н 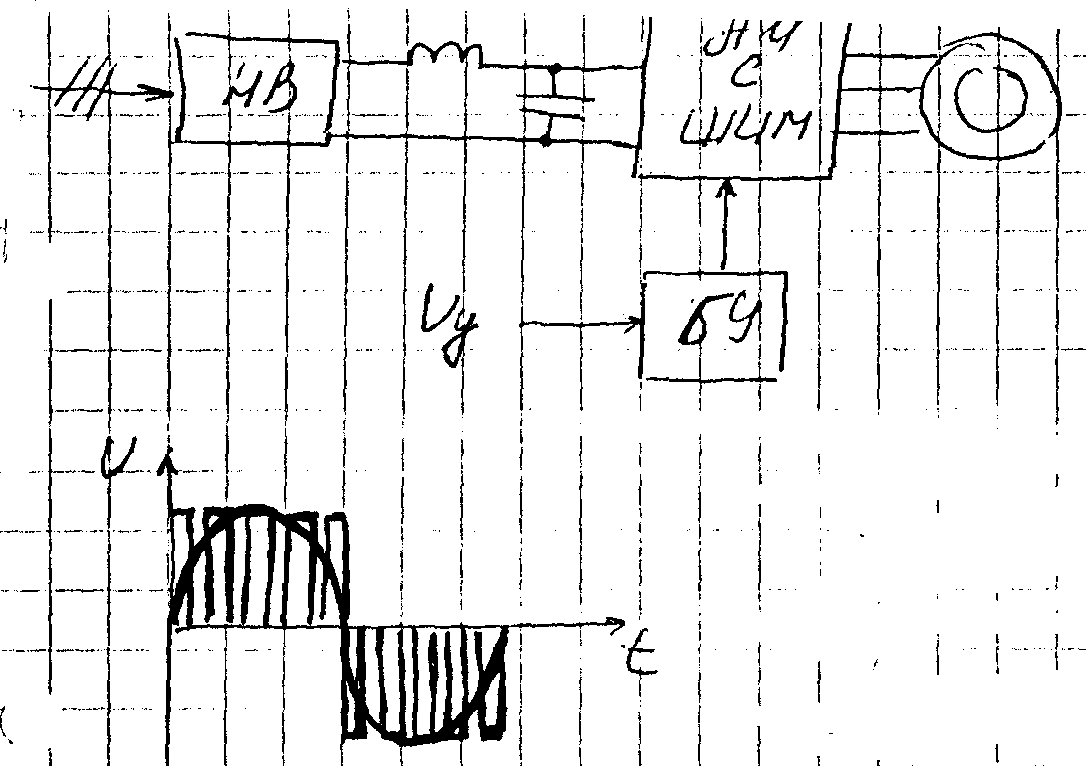 агр. Диаграмма тахограмма агр. Диаграмма тахограмма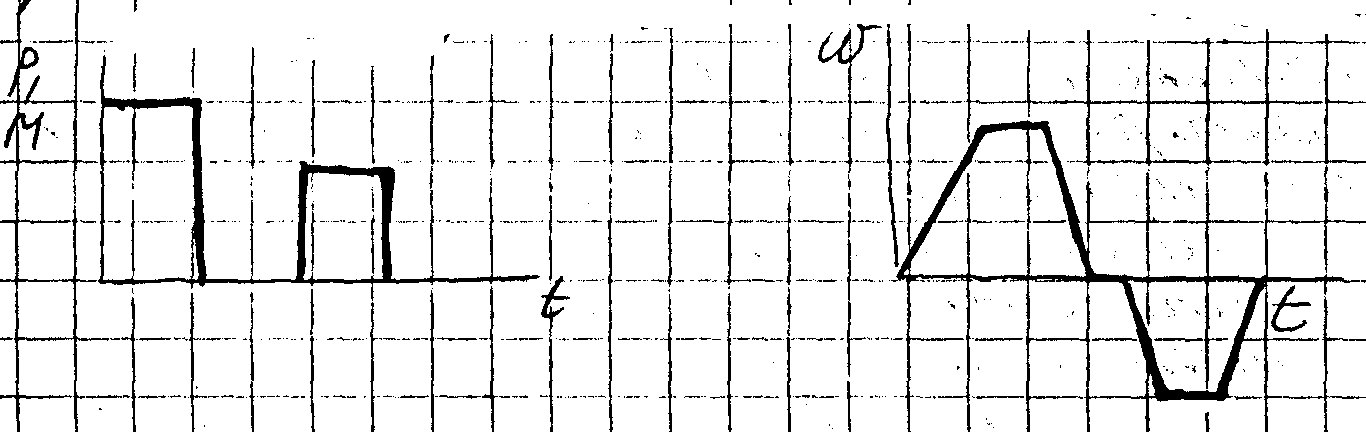 Система управления электроприводом это совокупность элементов информационного канала участвующего в управлении. Объектом управления является совокупность элементов входящих в силовой канал ЭП. В систему управления входит: 1. Устройство ввода команд 2. Устройство управления 3. Устройство вывода информации о состоянии электропривода 4. Информационно – измерительная система (датчики) 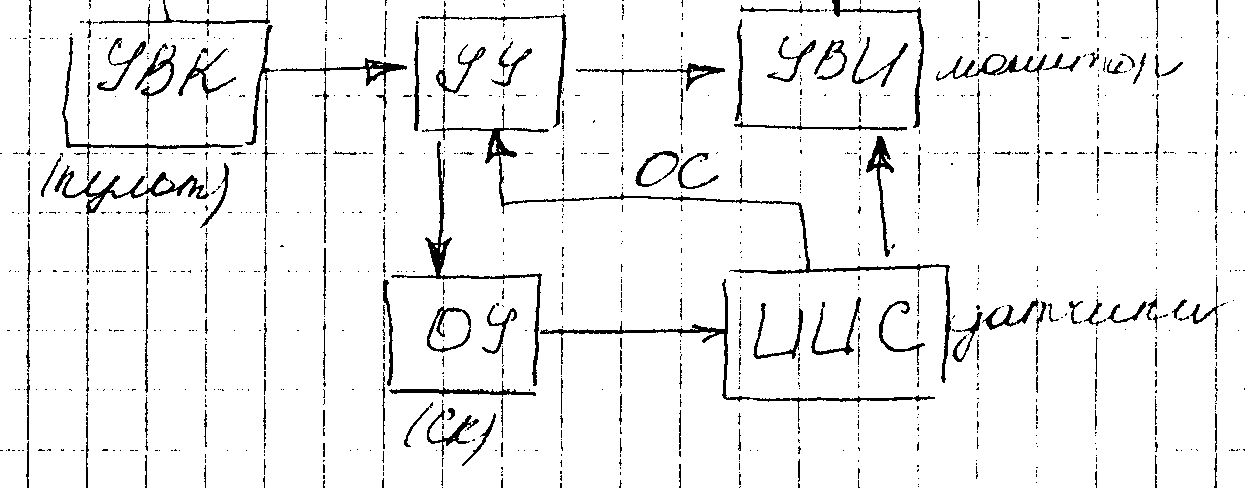 Классификация систем управления В зависимости от количества каналов передачи информации, системы управления могут быть: 1. разомкнутыми (без ОС) 2. замкнутыми (с ОС) 3. адаптивными (имеют дополнительные каналы передачи информации для изменения параметров или структуры управляющего устройства). По характеру входного (задающего) сигнала системы управления бывают:
По характеру управляющих сигналов системы могут быть с:
По виду элементов входящих в систему, системы могут быть:
По количеству управляемых координат системы могут быть:
По структурной схеме системы управления могу быть:
  |
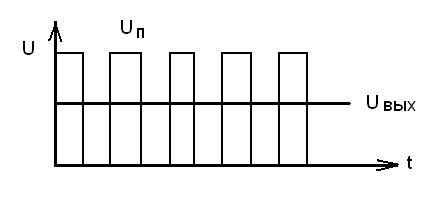
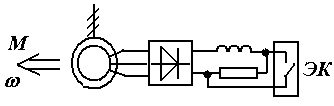 ля уменьшения ступенчатости регулирования применяется ШИМ с помощью электронных ключей на транзисторах и тиристорах:
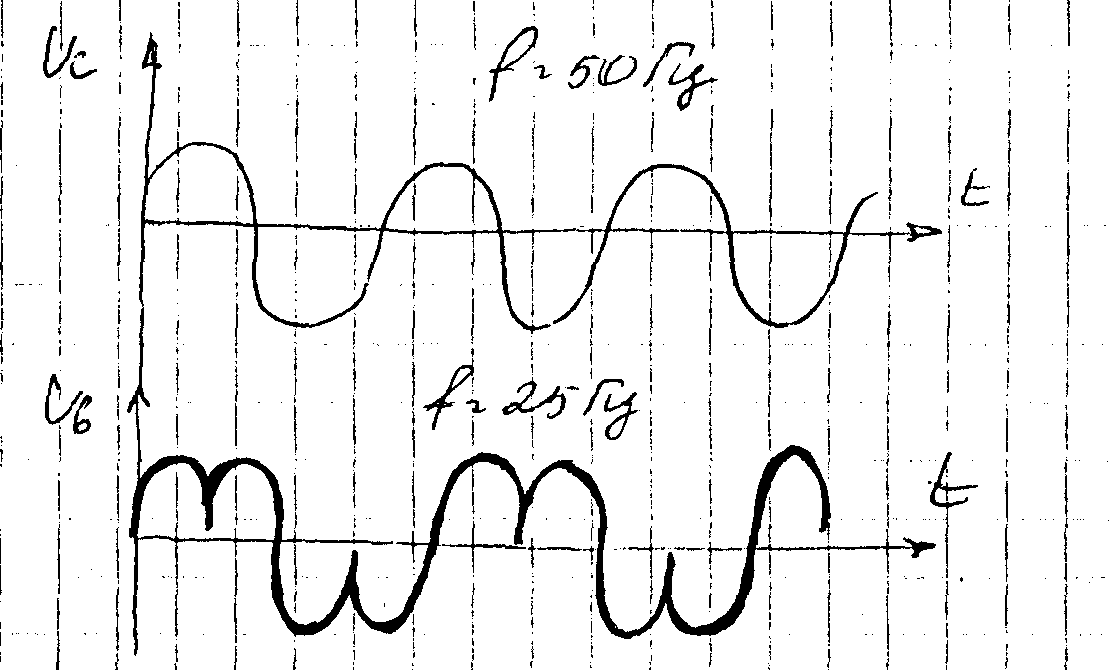
ля уменьшения ступенчатости регулирования применяется ШИМ с помощью электронных ключей на транзисторах и тиристорах: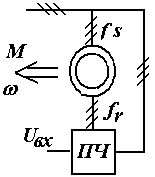 ля повышения точности регулирования и жесткости механической характеристики применяется электропривод с машиной двойного питания. При таком питании скорость вращения ротора пропорциональна разности частот:
ля повышения точности регулирования и жесткости механической характеристики применяется электропривод с машиной двойного питания. При таком питании скорость вращения ротора пропорциональна разности частот: 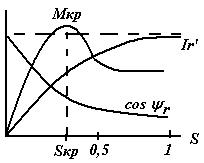 корость холостого хода АД:
корость холостого хода АД:  , где:
, где:  ;
; ;
;