ЭОП. Дисциплина Электрооборудование промышленности содержание
 Скачать 3.9 Mb. Скачать 3.9 Mb.
|

|
25. Расчет входных и выходных фильтров силовых преобразователей электроэнергии. 26 Статические характеристики и режимы работы электропривода постоянного тока с зависимым возбуждением. З 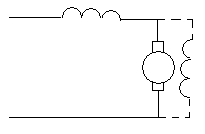 ависимое возбуждение – это последовательное или смешанное возбуждение, когда ток возбуждения зависит от тока якоря. ависимое возбуждение – это последовательное или смешанное возбуждение, когда ток возбуждения зависит от тока якоря.Двигатели с таким возбуждением имеют большой пусковой момент при той же мощности и широко применяются на транспорте. 1. Статические характеристики. М 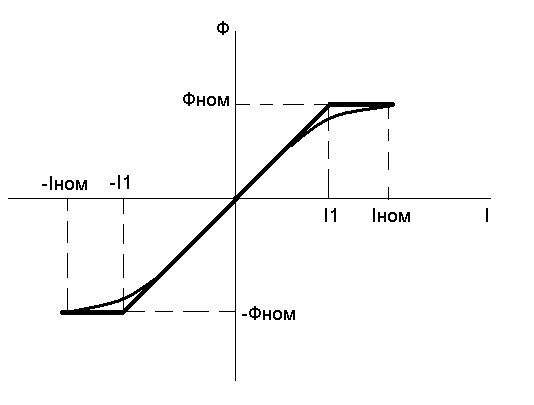 агнитный поток возбуждения становится функцией тока якоря. агнитный поток возбуждения становится функцией тока якоря.Рассмотрим кривую намагничивания. Для получения наиболее высокого КПД и малых габаритов Iном и Фном выбираются на границе насыщения. Реальная кривая намагничивания для получения статических характеристик заменяется отрезками прямых линий. На участке от –I1 до I1 Получим статические характеристики для машины с последовательным возбуждением. - 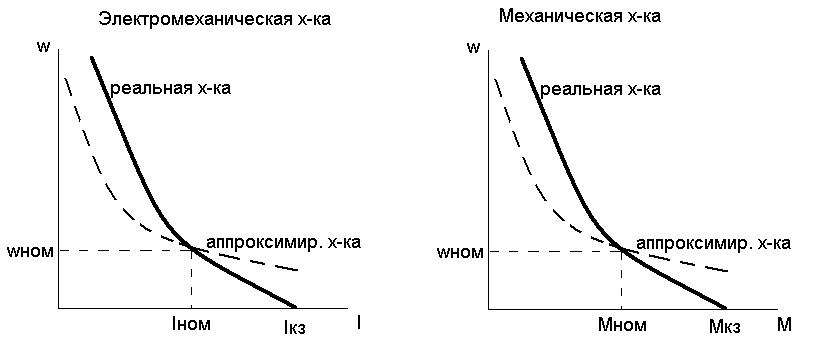 электромеханическая электромеханическая 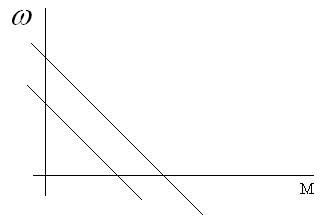 - механическая Естественные статич х-ки снимаются при 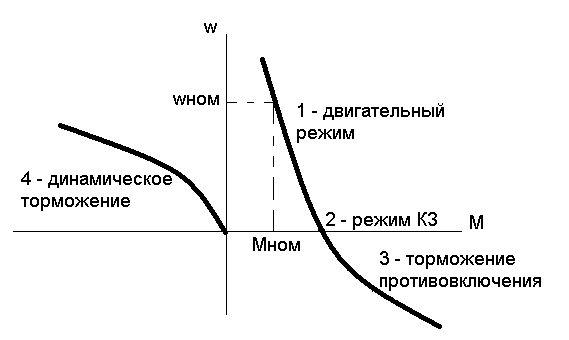 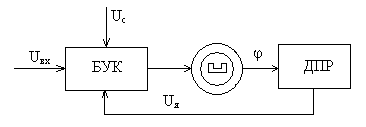 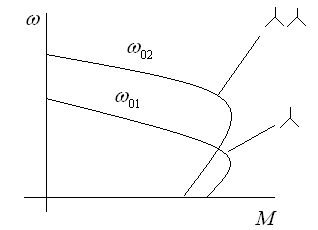 - искусственная х-ка. - искусственная х-ка.При уменьшении ЭДС преобразователя и введении добавочного сопротивления получаются искусственные хар-ки, которые проходят ниже естественных 2. Режимы работы. Нет режима ХХ и рекуперативного торможения, что обусловлено тем, что при увеличении скорости Для динамического торможения двигатель отключается от преобразователя, и цепь якоря замыкается на дополнительный резистор. Под действием ЭДС якоря проходит ток и возникает тормозной электромагнитный момент. Для того, чтобы возникло самовозбуждение двигателя, сопротивление цепи якоря должно быть меньше критического значения Ф 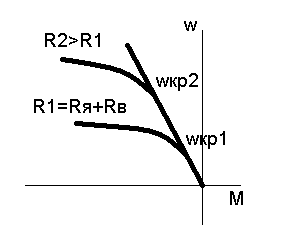 ормулы механической характеристики динамического торможения: ормулы механической характеристики динамического торможения: Основным преимуществом двигателей с последовательным возбуждением является большой пусковой момент при одинаковой мощности с двигателями независимого возбуждения, поэтому эти двигатели широко применяются в электротранспорте. 27. Управление координатами в асинхронном электроприводе с короткозамкнутым ротором.
Н 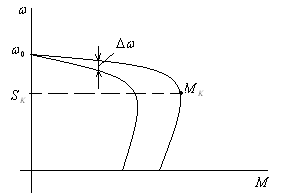 апряжение на фазах статора можно изменять с помощью тиристорного или симисторного преобразователя напряжения или посредством переключения обмоток со схемы звезда на схему треугольник. При изменении напряжения на обмотках статора изменяется критический момент двигателя пропорционально квадрату напряжения. апряжение на фазах статора можно изменять с помощью тиристорного или симисторного преобразователя напряжения или посредством переключения обмоток со схемы звезда на схему треугольник. При изменении напряжения на обмотках статора изменяется критический момент двигателя пропорционально квадрату напряжения.При переключении со звезды на треугольник момент вырастает в три раза. Преимущества: простота и дешевизна реализации; экономия энергии за счет снижения напряжения при уменьшении момента сопротивления; возможность плавного пуска двигателя при увеличении напряжения. Для плавного пуска применяются так называемые софт-стартеры на тиристорах и симисторах. Недостатки: малый диапазон регулирования скорости, поэтому целесообразно применять данный метод для стабилизации скорости при изменении нагрузки. Большие потери в процессе регулирования. Невысокая точность, т.к. снижается жесткость () механической характеристики.
А) Изменением частоты, подводимой к двигателю с помощью преобразователя частоты на тиристорах или транзисторах. В) Переключением числа пар полюсов в многоскоростных двигателях. В промышленности выпускаются 2, 3, 4-х скоростные двигатели с дополнительным числом пар полюсов. Наиболее часто применяется со схемой звезда на 2-ю звезду. При переключении со схемы звезда на 2-ю звезду скорость х/х увеличивается в 2 раза, а критический момент не изменяется. Преимущества: простота реализации. Недостаток: ступенчатость регулирования, невысокая надежность релейно-контакторных схем. Основной способ регулирования скорости АД является изменением частоты тока статора с одновременным изменением напряжения с помощью частотного преобразователя. При этом для сохранения постоянного критического момента и ограничения тока двигателя выдерживается постоянным отношением Преимущества: большой диапазон, т.к. частота от 1 до 400 Гц; высокая точность регулирования, т.к. Недостаток: сложность и большая стоимость преобразователя частоты. При вентиляторном моменте сопротивления пропорционально квадрату скорости, который имеет место в центробежных насосах, для экономии энергии используются квадратичные законы регулирования напряжения. Для повышения точности регулирования скорости двигателя применяется векторное управление, при котором изменяются амплитуда, частота и фаза тока в каждой обмотке статора. Оптимальное положение вектора обмотки статора относительно его ротора. 28. Элементная база информационного канала. Цифровые интегральные микросхемы. До 50-х гг. в разомкнутых системах ЭП примен. В основном, реле и контакторы, а замкнутых – электромашинные усилители. В 60-х появились дискретные системы управления на диодах и транзисторах. В регулир. ЭП внедрялись машинные усилители. В 70-х в разомкнутых системах начали применяться интегральные логич. микросхемы для формирования управляющих сигналов. В замкнутых – тиристорные и транзисторные преобразователи. С 80-х – разомкнутые и замкнутые системы с МП – управлением и гибкой логикой функционирования. Такое изменение в элементной базе информационного канала привело к увеличению качества и точности управления, повышению КПД и надежности, снижению массы и стоимости оборудования. В соврем. оборудовании находят применение все элементы информационного канала. 2. Аналоговые регуляторы на операционных усилителях. 3.Цифровые интегральные микросхемы. Цифровыми наз. микросхемы, кот. работают с информацией в двоичной форме «0»=>Uо=0..0,5В «1»=>U1=2,4..5В По степени интеграции различают : 1)Малые ИС n<100 (логические элементы, триггеры) 2)средние ИС n<1000 (функциональные узлы) 3)БиС n=1000 – 10000 (ОЗУ, ПЗУ , УВВ) 4)СБиС n>104 (микропроцессоры) А)Характеристики ИМС -Быстродействие – время задержки пропускания сигнала: t -потребляемая мощность, мВт -надежность, помехозащищенность Основные характеристики зависят от вида технологии изготовления микросхемы. Технология изготовления ТТЛ обеспечивает среднее быстродействие и среднее потребление мощности (ТТЛ К155) ТТЛЩ – ТТЛ с диодами Щоттки – уменьшение потребления мощности. КМОП – комплиментарные металл-окисл. проводник на полевых транзисторах. Обеспечивает минимальное потребление энергии, выс. помехозащищенность при небольшом быстродействии. NМОП на полевых транзисторах n-типа обеспеч. наиболее выс. быстродействие. Б) Логические ИМС В   1 0 0 0 0 0 1 1 1 1 1 1 1 & & 1 1 1 0 НЕ ИЛИ И И-НЕ ИЛИ-НЕ одном корпусе могут содержать от 2 до 9 однотипных элементов. 0 0 0 ЛН ЛЛ ЛИ ЛА ЛП- прочие, ЛК – комбинированные В) триггеры на ИМС RS-триггеры Т – триггеры Д - триггеры  Д – триггер задерживает сигнал на входе Д до прихода синхроимпульса на вход С. JK – триггер Может выполнять функции любого триггера в зав-ти то комбинации сигнала на входе J,K 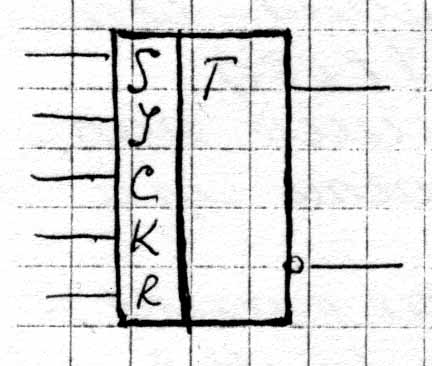 если J=K=0 => RS -триггер k Г) функциональные узлы на ИМС. -Регистры – предназначены для хранения двоичного кода числа, постр. на RS – триггерах или на D – триггерах (сдвигающий) (RB-/UP) Сдвигающий рег.: RG -Дешифраторы (ДС/ИГ) – преобраз. двоич. код в управляющ. сигнал 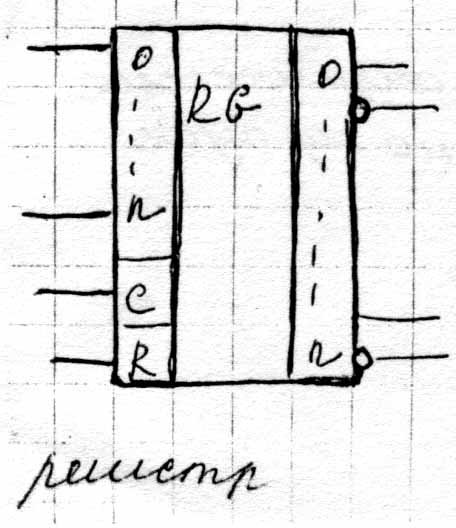 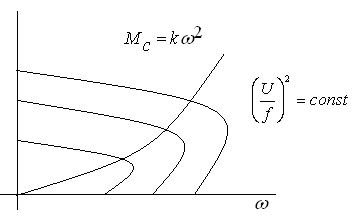 число выходов дешифратора N=2 число выходов дешифратора N=2n – число входов -счетчики (СТЧ/ИЕ) -мультиплексоры (MS/КП) – для коммутации разных входов на 1 выход. Цифровые интегральные микросхемы Работают в двоичной форме «0» - U=0-0,5B «1» - U=2,4-5B 29. Синтез дискретных управляющих автоматов. Дискретные автоматы используют для управления Электрооборудованием в промышленности Они могут быть построены на релейно-контакторных схемах, логических интегральных микросхемах на жесткой логике, а также на микропроцессорных системах с гибкой логикой. Синтез ДА включает в себя следующие этапы:
- определение интерфейса с объектом управления, определение числа выходных сигналов, их типа и уровня - определение интерфейса с оператором и АСУ ТП -словесное описание алгоритма функционирования 2) разработка математической модели -схема алгоритма функционирования -граф автомата -сетевые модели для описания параллельных процессов на основании математической модели производится оптимизация структурных схем автомата, уменьшается число элементов. 3)разработка структурной схемы ДА В общем случае структурная схема включает в себя входной логический преобразователь ЛП1 , блок памяти П и выходной логический преобразователь ЛП2 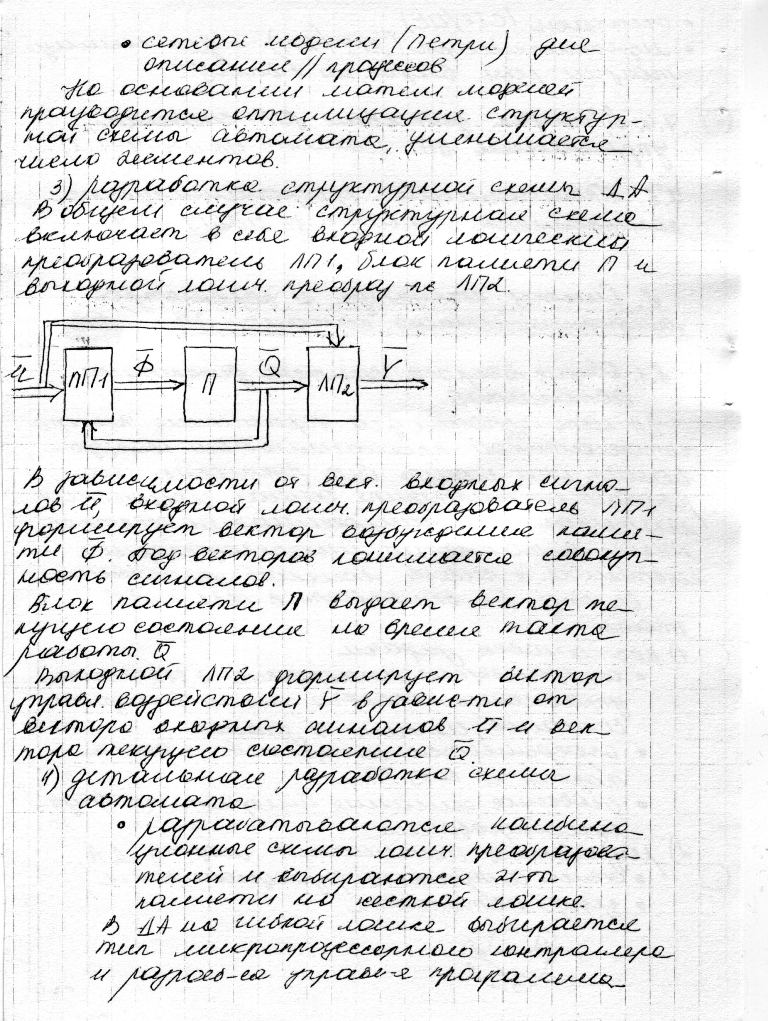 В зависимости от вектора входных сигналов , выходной логический преобразователь формирует вектор возбуждения памяти. Под вектором понимается совокупность сигналов Блок памяти выдаёт выходной вектор. ЛП2 формирует вектор управления воздействием в зависимости от вектора входных сигналов и вектора текущего состояния 4)детальная разработка схемы автомата - разрабатываются комбинационные схемы логических преобразователей и выбирается элементы памяти на Жесткой логике. В ДА на гибкой логике выбирается тип микропроцессорного контроллера и разрабатывается управляющая программа. 5) детальная разработка принципиальной схемы -цепи подключения датчиков и органов управления к контроллеру -цепи подключения элементов автоматики и входных цепей контроллера -блок питания и защита контроллера и электроавтоматики 1 30. Управление координатами в системе преобразователь (источник ЭДС) – двигатель постоянного тока. Скорость и момент двигателя изменяются за счет изменения ЭДС преобразователя. На практике применяются транзисторные и тиристорные преобразователи, а также система генератор-двигатель. При этом ЭДС меняется плавно по определенному закону (чаще всего, линейному), чтобы ограничить ток и момент двигателя. П 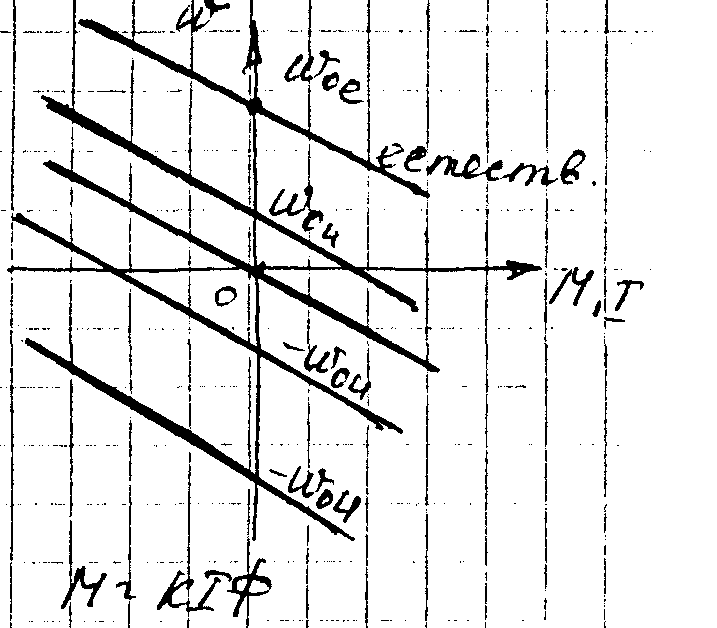 ри изменении Еп, искусственные характеристики перемещаются параллельно естественной. ри изменении Еп, искусственные характеристики перемещаются параллельно естественной.Преимущества:
ηп=0,95-0,97. Недостатки:
Управление координатами посредствам формирования зависимости еп(t). Предположим, что Тп=0; Тя=0 для упрашения, а мех. характеристика линейна. Требуется получить динамические мех. Характеристики, которые определяют соответствие между скоростью и моментом двигателя в переходных процессах, в зависимости от характера изменения ЭДС преобразователя якоря. В системе ген-двиг. постоянная времени преобразователя определяется, в основном постоянной времени цепи возбуждения генератора Lвг – индуктивность ОВ генератора Rвг – активное сопротивление ОВ генератора Функциональная схема системы двигатель-генератор 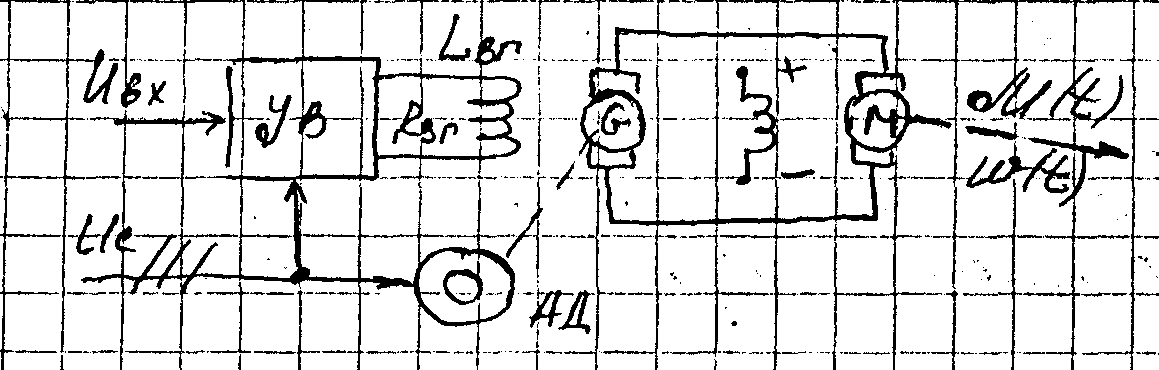 УВ – управляемый выпрямитель АД – асинхронный двигатель G- генератор постоянного тока М – двигатель постоянного тока Ротор генератора вращается асинхронным двигателем Быстродействие системы ограничевается инертностью цепи возбуждения генератора При изменении вх. сигнала Uвх., изменяется ток возбуждения и ЭДС генератора, и затем скорость двигателя. Преимущества системы: большая мощность Недостатки: малый КПД и срок службы, (надежность)  |