ЭОП. Дисциплина Электрооборудование промышленности содержание
 Скачать 3.9 Mb. Скачать 3.9 Mb.
|

|
Дисциплина «Электрооборудование промышленности» СОДЕРЖАНИЕ 1. Электропривод как система. Структурная схема электропривода (ЭП). ЭП – это управляемая Эл. Механическая система для преобразования электрической энергии в механическую и автоматизации технологических процессов. ЭП как система состоит из 2х каналов: силовой канал ЭП предназначен для передачи и преобразования энергии и состоит из электрической и механической части. Информационный канал ЭП управляет потоком энергии, производит сбор и обработку данных о состоянии системы и диагностику её неисправностей. Э  лектрическая часть силового канала состоит из: системы электроснабжения(СЭС), электрических преобразователей (ЭП), и электрической части электромеханического преобразователя (ЭМП). лектрическая часть силового канала состоит из: системы электроснабжения(СЭС), электрических преобразователей (ЭП), и электрической части электромеханического преобразователя (ЭМП).К СЭС относится линии электропередач, аппаратуру защиты и коммутации. ЭП могут состоять из трансформаторов, электронных и электромеханических преобразователей, преобразователей Эл. Энергии по роду тока, по амплитуде и частоте. К ЭМП относится электродвигатели постоянного и переменного тока, электромагнитные муфты и тормоза. Электромеханическая часть силового канала состоит из: ЭМП (ротора), механического преобразователя (МП) редуктора, рабочего органа (РО), технологических установки. В состав информационного канала входит: автоматизированная система управления (АСУ), предназначена для формирования управляющих сигналов в соответствие с заданной программой и сигналами информационных преобразователей (ИП). АСУ включают в себя аналоговые и цифровые сигналы, промышленные компьютеры и контроллеры. ИП включают в себя датчики сигналов, их усилители и преобразователи. ЭП обеспечивает сопряжение АСУ с силовым каналом. Истории и тенденции развития электропривода Основные направления развития электропривода. 1) использование более совершенных электродвигателей. Используются бесконтактные, высокомоментные двигатели с более высоким КПД при меньшей массе. 2) совершенствование полупроводниковой моментной базы, внедрение новых типов тиристоров и транзисторов. 3 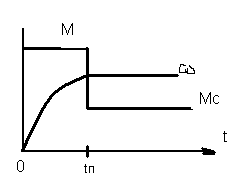 ) расширение функциональных возможностей электропривода: повышение точности и быстродействия, улучшение систем диагностики и защиты. ) расширение функциональных возможностей электропривода: повышение точности и быстродействия, улучшение систем диагностики и защиты. 4) увеличение объёма информации поступающей в электропривод для улучшения управления. 5) развитие систем цифрового и микропроцессорного управления электроприводом. 6) приближение двигателей к исполнительному органу за счёт упрощения МП (мех. преобразователя) 2. Механические характеристики производственных механизмов электродвигателей. Общие сведения о механической части. Управление движения ЭП. 1) Выбор математической модели механической части зависит от постановки задачи. Модель механической части должна связывать параметры её элементов с действующими силами и моментами, а также ускорением скоростью и положение рабочего органа технологической установки. При этом делаются определённые допущения. Например, пренебрегают упругостью механической передачи, а также люфтами в ней. В этом случае механическая часть рассчитывается по одномассовой расчётной схеме с суммарными приведёнными к валу двигателя моментами сопротивления Мс, и инерции J. В быстродействующих замкнутых системах управления электроприводом для обеспечения устойчивости работы приходится рассматривать механическую часть по многомассовой расчётной схеме с учётом люфтов и упругости передачи. 3. Основные уравнения движения механической части электропривода. Выводится из 2 закона Ньютона. Для вращательного движения электропривода уравнение движения (динамики): При поступательном движении электропривода, например, в электромагнитах или линейных асинхронных двигателях, уравнение движения имеет вид: Для расчёта времени переходного процесса в электроприводе, например, пуска или торможения, решается его уравнение движения относительно времени Т. к. все моменты электропривода могут зависеть от скорости, то расчёт времени переходного процесса выполняется точно численными методами на ПК. При приближенных расчётах моменты считают постоянными, равными их средним значениям ( Время пуска электропривода рассчитывается по формуле График изменения моментов и скорости двигателя при пуске имеет вид: Графо-аналитический метод решения уравнения движения Обеспечивает достаточно точное решение и построения графика переходного процесса при любых зависимостях момента сопротивления от скорости. Пример расчёта для асинхронного двигателя Ось скорости w делится на участки Одномассовая расчётная схема механической части электропривода а) при вращательном движении РО При такой схеме все моменты сопротивления нагрузке и моменты инерции приводится к валу двигателя с учётом параметров механической передачи. Из условия баланса мощностей можно записать б) расчёт момента сопротивления при поступательном движении РО V – скорость движения механизма в) Приведение моментов инерции к валу двигателя Jдв – моменты инерции двигателя Многомассовые расчётные схемы электропривода. В замкнутых системах автоматического уравнения электроприводом может возникать неустойчивость в определённых режимах работы, если не учитывать люфт и упругость мех. передачи. Во многомассовых расчётных схемах составляется диф. Уравнения для движения отдельных частей системы, а также уравнение связи, учитывающие коэффициенты жёсткости механических передач. 4. Элементы проектирования электропривода. Постановка Задачи : 1) в замен устаревшему ЭП разработать современный, с лучшими экономическими и техническими данными; 2) в замен нерегулируемого ЭП данного агрегата применить регулируемый для повышения качества функционирования 3) разработать ЭП, которым нужно заменить имеющийся без модернизации Этапы проектирования: 1) формулировка задачи. Необходимо определить точно требуемые технические характеристики проектируемого объекта и требования к его конструкции; 2) анализ задачи. Определение критериев выбор наиболее лучшего варианта и технических ограничений. Критерии: технически – определяю качество двигателя ЭП; технико-экономические – надёжность, потребление электроэнергии, масса, габариты, КПД; экономические – стоимость, срок окупаемости затрат, годовая прибыль от внедрения модернизированного ЭП. 3) поиск возможных решений. 4)выбор решения. 5)детальная разработка выбранного решения- выбирается оборудование, проектируется схема и алгоритм работы системы управления, производится конструктивная компоновка узлов и оценка энергетических показателей. 5. Управление координатами в электроприводе постоянного тока при реостатном регулировании.
Все эти способы применяются на практике, но каждый из них имеет свои преимущества и недостатки. При реостатном регулировании в цепь якоря включается добавочное сопротивление. При пуска двигателя скорость увеличивается за счет шунтирования добавочных резисторов контактами контакторов КМ1 и КМ2. Рассмотрим вид механической характеристики при включении добавочных резисторов в цепи якоря. 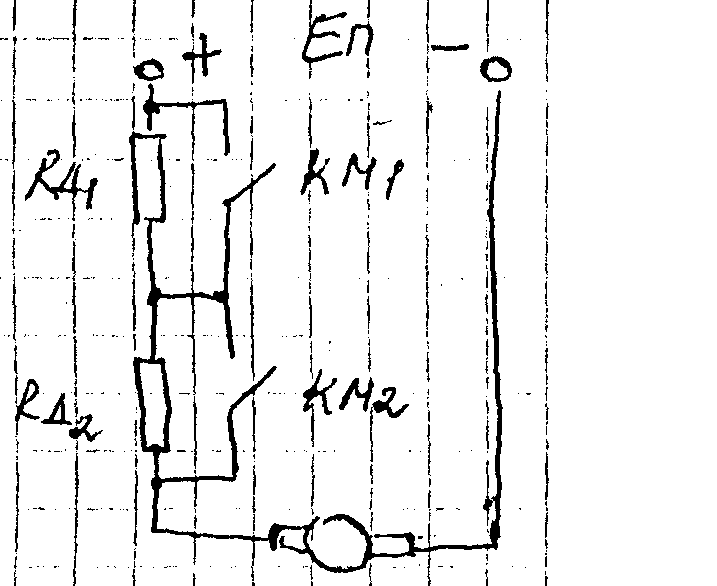 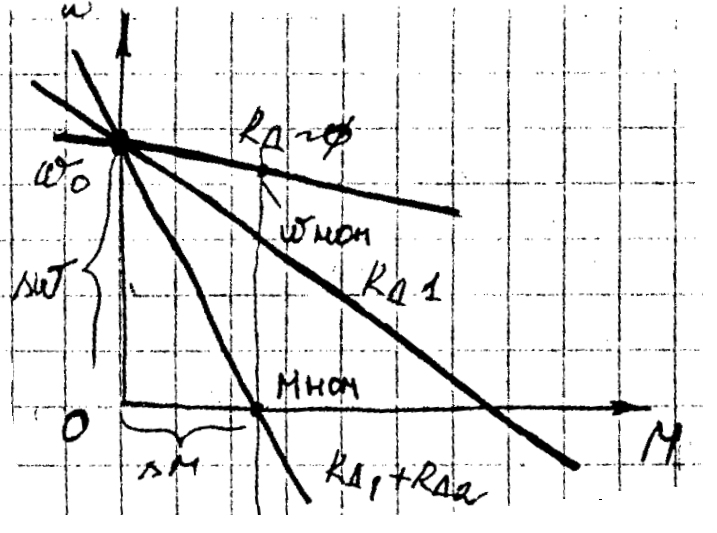 Преимущества:
Недостатки:
где Р1-мощность от цепи Р2-мощность вала Уравнение баланса мощностей Т.о. на малых скоростях большая часть энергии преобразуется в тепло. 2. малая точность регулирования на малой скорости, т. к. снижается жесткость механической характеристики: 3. ступенчатость регулирования, для уменьшения ступенчатости применяются электронные ключи, широтно-импульсной модуляции (ШИМ), но это усложняет схему. Реостатное регулирование применяется в основном, в разомкнутых схемах регулирования, на электротранспорте. Для повышения жесткости и точности регулирования на малых скоростях можно применять схему с шунтированием якоря. Рассмотрим как будут изменятся мех. Характеристики при уменьшение сопротивления шунта Rш и постоянном добавочном сопротивлении Rд. 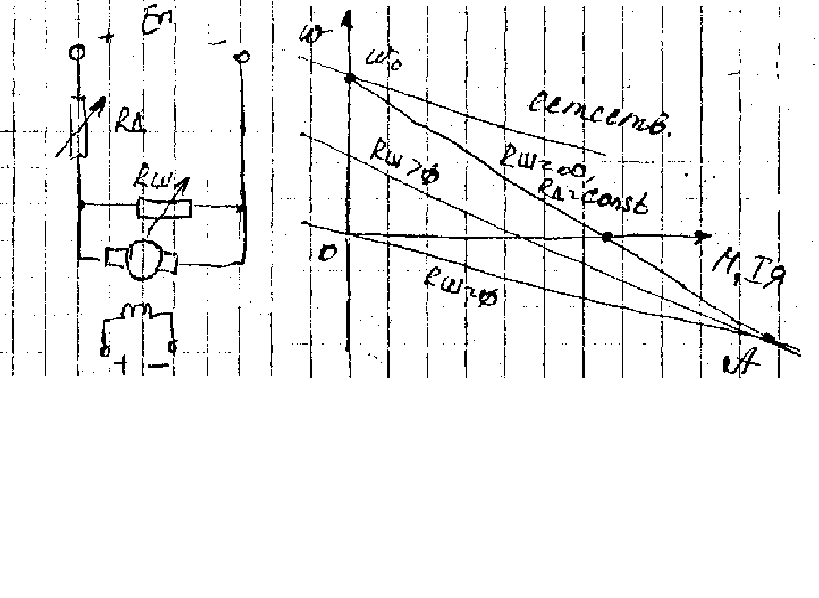  При уменьшении сопротивления шунта характеристика будет поворачивается вокруг точки А, в которой Uя=0 и Iш=0. Повышается жесткость → повышается точность регулирования. Т. к. потери энергии увеличиваются многократно данный способ не нашел практического применения. Рассмотрим схему реостатного регулирования при последовательном возбуждении двигателя. 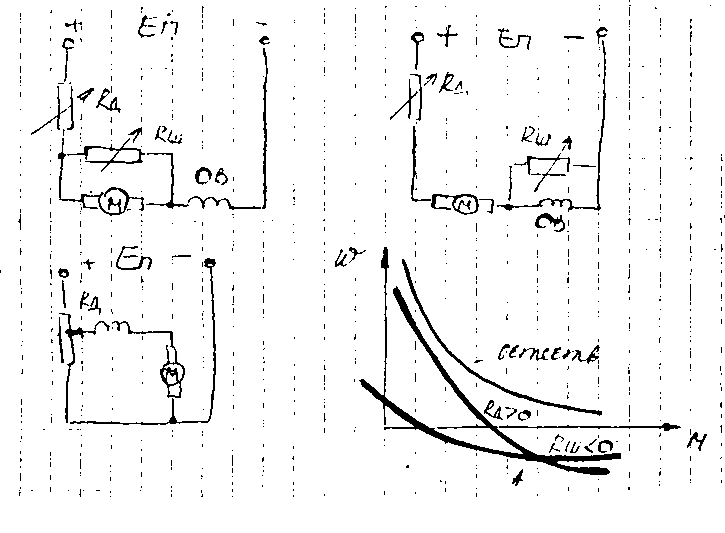 При реостатном регулировании при пуске двигателей применяются реле времени, скорости, тока или напряжения, для ограничения пускового тока. 6. Статические характеристики и режимы работы электропривода постоянного тока с независимым возбуждением. 1  . Статические характеристики ЭП получаются из уравнения матмодели в установившемся режиме: . Статические характеристики ЭП получаются из уравнения матмодели в установившемся режиме: а) электромеханическая характеристика механическая характеристика  , , Естественные статические характеристики снимаются при следующих условиях: 2. Энергетические режимы определяются потоками энергии (направлением) и значением электрической или механической мощности для любой точки механической характеристики. 1 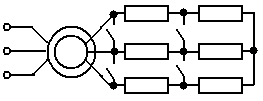 . Режим идеального ХХ. . Режим идеального ХХ. В этом режиме Энергия в системе не циркулирует, потерь в якорной цепи нет, но есть потери в цепи возбуждения двигателя. 2. Двигательный режим. Привод переходит в этот режим, если к двигателю прикладывается момент нагрузки 3. Режим КЗ. Вал двигателя заторможен большим моментом сопротивления: 4. Режим торможения противовключения. К валу прикладывается большой момент нагрузки больше момента КЗ. 5. Рекуперативное торможение. Если скорость двигателя увеличить выше скорости ХХ под действием механической нагрузки, то ЭДС якоря превысит ЭДС преобразователя и механическая энергия при торможении преобразуется в электрическую и возвращается в сеть. Это наиболее выгодный режим торможения, который применяется в электротранспорте. Для реализации этого режима необходимы переключения передаточного отношения механического преобразователя или увеличение магнитного потока возбуждения. 6. Динамическое торможение. Двигатель отключается от преобразователя и цепь якоря замыкается на добавочный резистор. Под действием ЭДС якоря проходит ток |