|
|
ЭОП. Дисциплина Электрооборудование промышленности содержание
12. Элементная база информационного канала. Аналоговые регуляторы электропривода.
До 50-х гг. в разомкнутых системах ЭП примен. В основном, реле и контакторы, а замкнутых – электромашинные усилители.
В 60-х появились дискретные системы управления на диодах и транзисторах. В регулир. ЭП внедрялись машинные усилители.
В 70-х в разомкнутых системах начали применяться интегральные логич. микросхемы для формирования управляющих сигналов. В замкнутых – тиристорные и транзисторные преобразователи.
С 80-х – разомкнутые и замкнутые системы с МП – управлением и гибкой логикой функционирования. Такое изменение в элементной базе информационного канала привело к увеличению качества и точности управления, повышению КПД и надежности, снижению массы и стоимости оборудования. В соврем. оборудовании находят применение все элементы информационного канала.
2. Аналоговые регуляторы на операционных усилителях. см. ЭА и МПУ.
3.Цифровые интегральные микросхемы.
13. Синтез структур и параметров информационного канала электропривода с подчиненным регулированием координат.
До 60-х годов замкнутые системы строились по схеме с общим суммирующим усилителем, это было удобно выполнять технически , но усложняло настройку на оптимальные параметры и качество.
Кеслер предложил схему с подчинённым регулированием координат, в которой для каждого контура ЭП имеется свой регулятор. 1-контур тока 2- контур скорости 3-контур угла поворота.
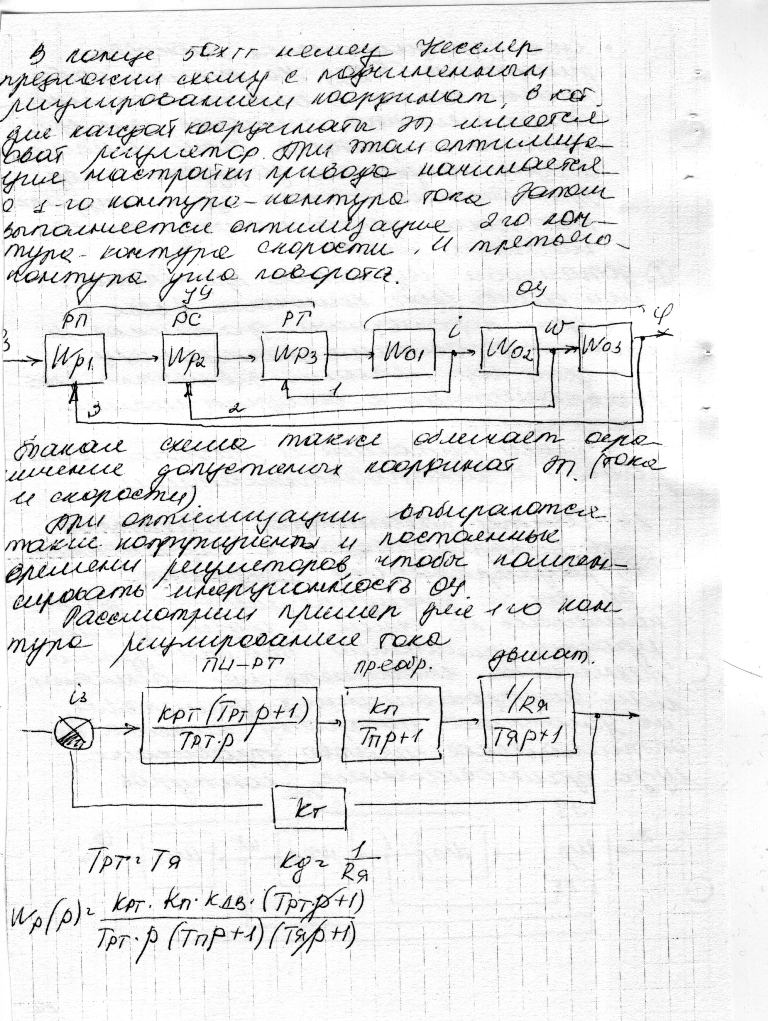
При оптимизации выбираются такие коэффициенты и параметры , чтобы компенсировать инерционность органа управления.
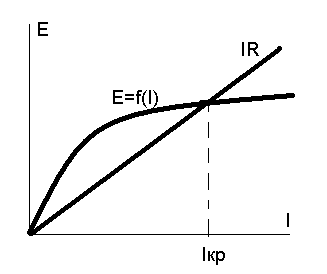
Пример для 1-го контура тока:
При оптимизации постоянная времени регулятора тока выбирается равной постоянной времени якоря двигателя. За счёт введения интегрирующего звена система считается астатичной, то есть работает без ошибки при действии возмущения.
Коэффициент регулятора тока рассчитывается таким образом чтобы получит систему 2-го порядка, оптимальный коэффициент затухания  и минимальное время регулирования и минимальное время регулирования
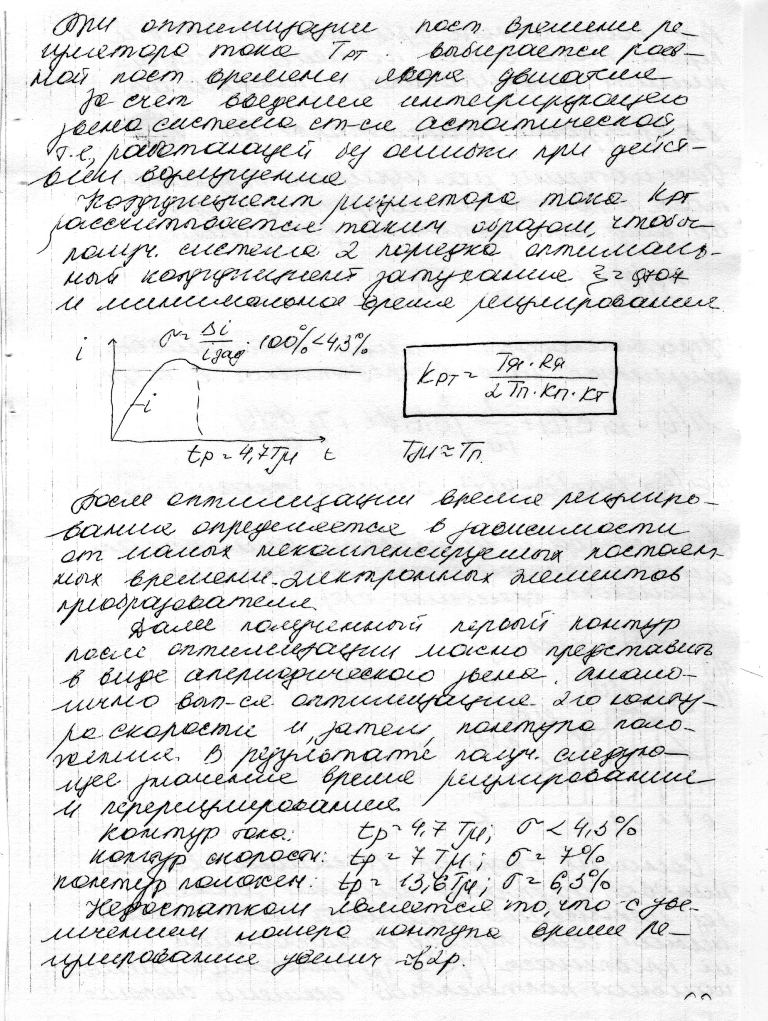
После оптимизации время регулирования определяется в зависимости от не скомпенсированных постоянных времени электронных элементов преобразователя. 1-й контур упрощается и принимает вид апериодического звена, далее оптимизируется 2-й контур
для контура тока : 
для контура скорости : 
для контура угла поворота : 
все современные системы ЭП выполняются по схеме с подчинённым регулированием координат
14. Цифровые микропроцессорные регуляторы электропривода.
Рассмотрим Реализацию Пид-регулятора с помощью микроконтроллера
передаточная функция регулятора имеет вид: 
управляющий сигнал можно представить в виде 
где  ошибка управления ошибка управления
При переходе к цифровым методам ошибка определяется в дискретные моменты времени
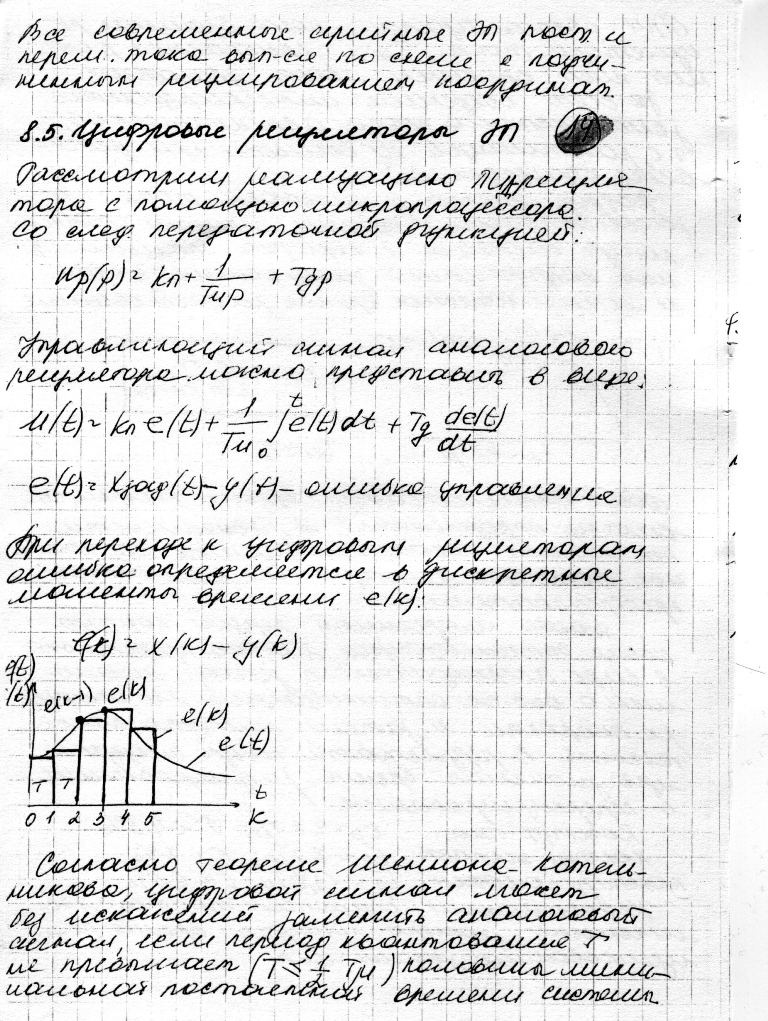
Согласно теореме Котельникова, цифровой сигнал может заменить аналоговый без искажения если период квантования не превысит 
при переходе к цифровой форме, операция интегрирования заменяется суммированием и умножением, а операция дифференцирования вычитанием и делением.
Управляющий сигнал регулятора формируется по следующей формуле:

Для повышения быстродействия применяю рекурентные алгоритмы, в которых управляющее воздействие определяется по формуле 
 управляющее воздействие на предыдущем сигнале управляющее воздействие на предыдущем сигнале
 приращение приращение
15. Классификация и особенности полупроводниковых силовых преобразователей электроэнергии.
Силовые преобразователи предназначены для преобразования Энергии по роду тока, амплитуде и частоте Классифицируются
- управляемые и неуправляемые выпрямители ( преобразуют
ток в =)
- инверторы ведомые сетью( преобразуют постоянный ток в
промышленной частоты) и автономные инверторы ( постоянный в переменный любой частоты)
- преобразователи частоты: непосредственные преобразователи частоты и ПЧ со звеном постоянного тока ( с управляемыми выпрямителями и неуправляемыми)
- преобразователи
напряжения по амплитуде
- импульсные преобразователи напряжения (широтно-импульсные, частотно-импульсные)
16. Топология выпрямителей разных типов и особенности их расчета.
Под топологией выпрямителей понимаются их принципиальные схемы
Расчёт выпрямителя сводится к определению напряжения, токов, коэффициентов пульсаций, мощности трансформаторов и выбору диодов или транзисторов
Выбор производится по следующим параметрам :
-максимально допустимый прямой ток
-максимально допустимое обратное напряжение
-минимальное падение напряжения в открытом состоянии
1 Однофазные Управляемые выпрямители (УВ)
могут выполняться по мостовой или нулевой схеме.
При активно-индуктивной нагрузке выходное напряжение определяется по формуле :
где,   -напряжение при нулевом угле альфа -напряжение при нулевом угле альфа
 напряжение вторичной обмотки трансформатора напряжение вторичной обмотки трансформатора
Коэффициент пульсации для однофазных УВ  , где , где  - амплитуда 1-ц гармоники - амплитуда 1-ц гармоники
В большинстве случаев требуется применение сглаживающих фильтров или реакторов при их работе
а) топология и расчёт УВ с нулевой точкой
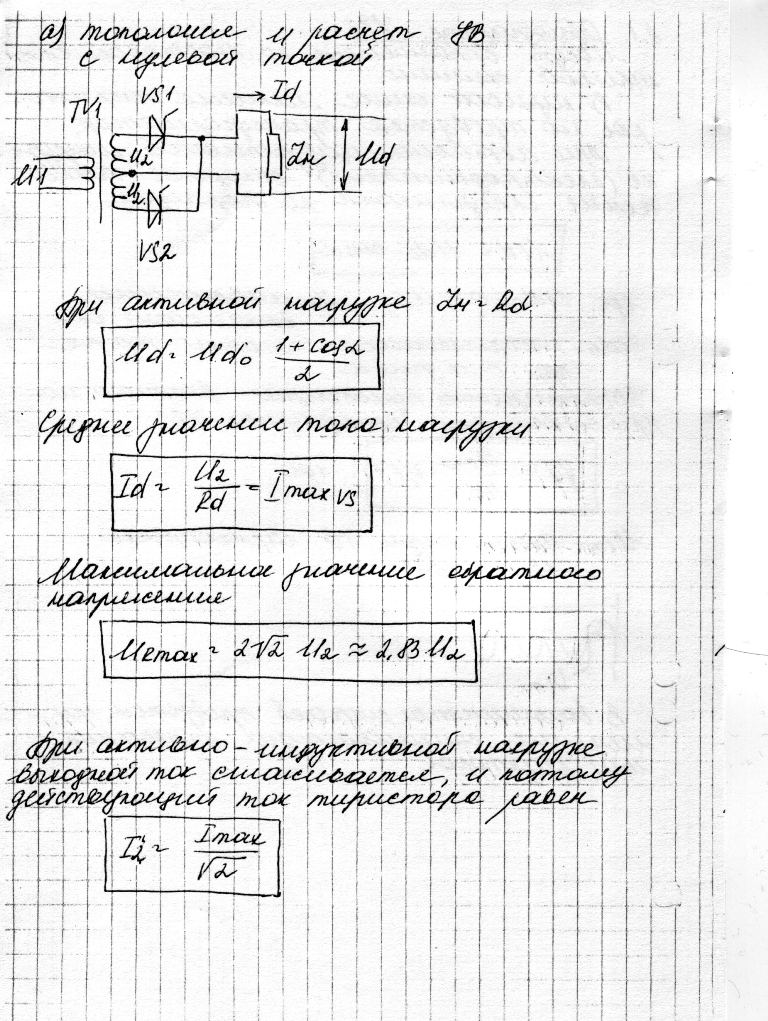
При активной нагрузке Zн=R
- среднее значение тока нагрузки : 
- максимальное значении обратного напряжения 
При активно индуктивной нагрузке выходной ток сглаживается и поэтому действующий ток тиристора равен 
Выбор трансформатора производится по полной мощности: 
б) топология и расчёт однофазного УВ по мостовой схеме
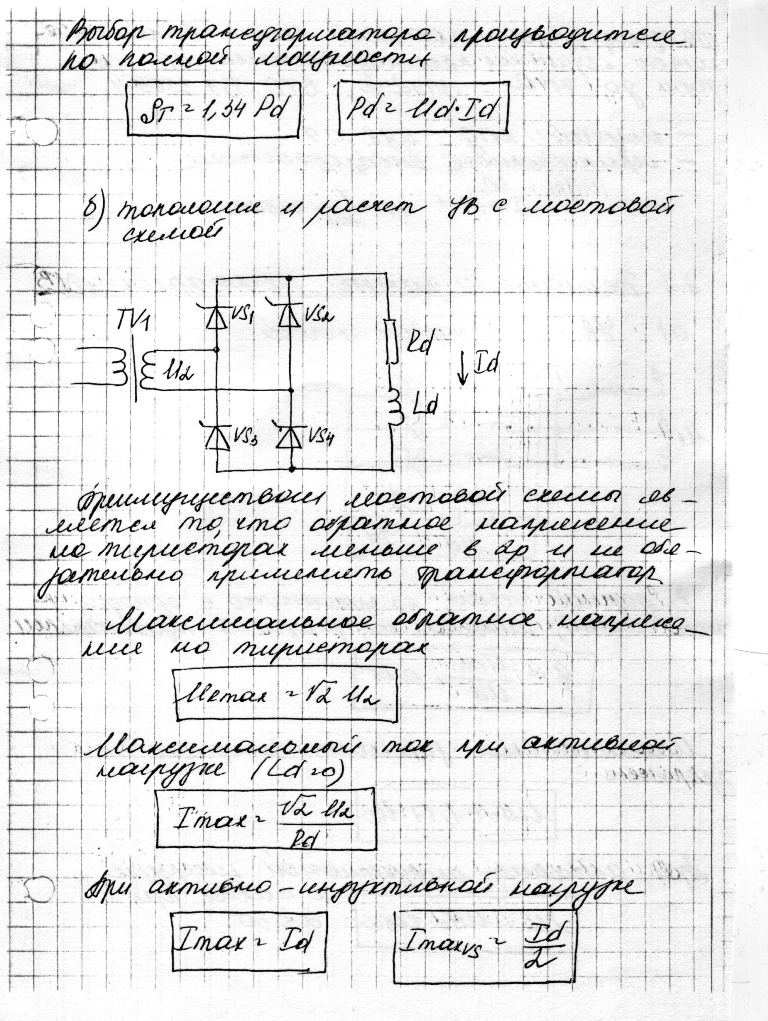
Преимуществом по сравнению с нулевой схемой является то , что не нужно применять трансформатор
- максимальное значении обратного напряжения 
- максимальное значение тока при активной нагрузке : 
для активно-индуктивной :  ; ; 
Выпускаются серийные преобразователи ЭПУ2-2, БТО, БУ 3509
не высокий КПД – 0,89-0,9; ограниченное быстродействие ТП 5мс 5мс
в)топология и расчёт 3-х фазных УВ с нулевой точкой
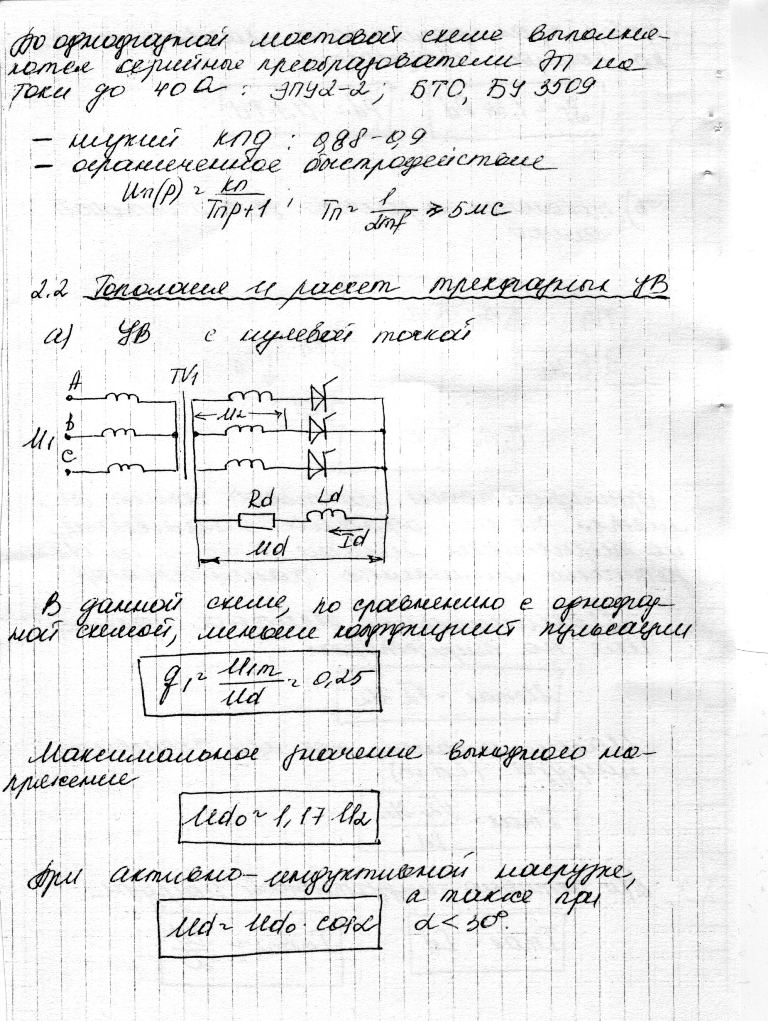
по сравнению с однофазной схемой имеют меньший коэффициент пульсаций 
-выходное напряжение определяется : - при активно-индуктивной нагрузке  где, где,  , -напряжение при нулевом угле альфа , -напряжение при нулевом угле альфа
для случая с активной нагрузкой если  выходное напряжение определяется как : выходное напряжение определяется как :
- максимальное значении обратного напряжения 
- максимальное значение тока при активной нагрузке : 
- для активно-индуктивной : 
- мощность трансформатора : 
В схеме можно обойтись без трансформатора , если ограничить  , но при этом возрастают пульсации напряжения. Выпускаются серии ПТЗМ на токи до 200А, КЕМТОК, КЕМРОН тока до 100а , но при этом возрастают пульсации напряжения. Выпускаются серии ПТЗМ на токи до 200А, КЕМТОК, КЕМРОН тока до 100а
г) трёхфазный УВ по мостовой схеме
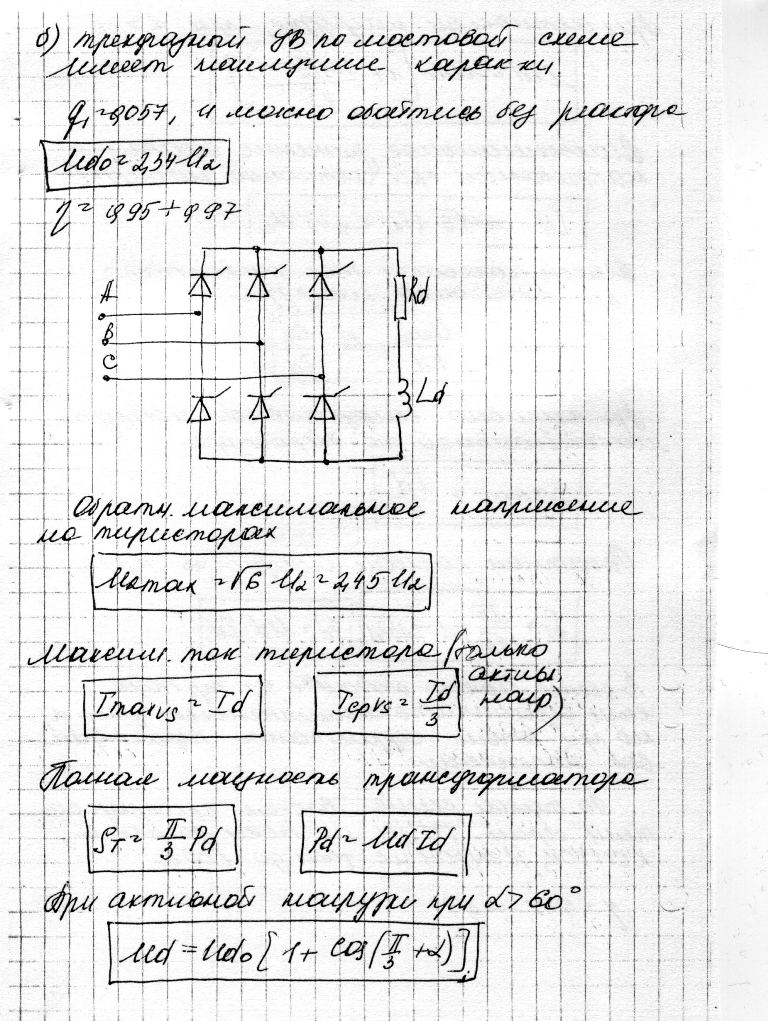
 ; ; 
- максимальное значении обратного напряжения
- максимальное значение тока при активной нагрузке : 
для активно-индуктивной :
выходное напряжение определяется : - при активно-индуктивной нагрузке  где, , -напряжение при нулевом угле альфа где, , -напряжение при нулевом угле альфа
для случая с активной нагрузкой если  выходное выходное
напряжение определяется как :
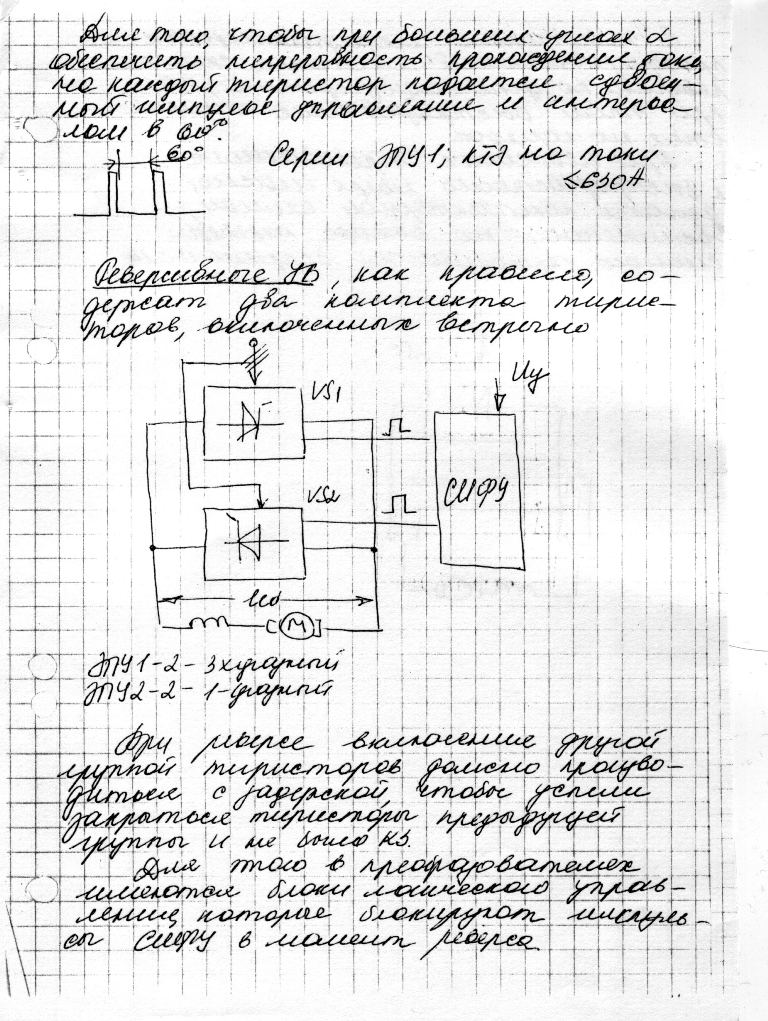
Для того чтобы при больших углах альфа обеспечить стабильность работы, на тиристоры подаются сдвоенные импульсы
 -мощность трансформатора : -мощность трансформатора : 
Выпускаются серии ЭПУ1, КТЭ на токи до 630 А
17. Инверторы, ведомые сетью, и автономные инверторы. Их расчет и характеристики.
а) инверторы ведомые сетью
Предназначены для преобразования постоянного тока в переменный с частотой сети
Выполняются по тем же схемам что и выпрямители ( однофазные, трёхфазные, мостовые , нулевые)
Для перевода управляемый выпрямитель в Инвертор ведомый сетью изменяется полярность постоянного напряжения и угол управления изменяется на 1800  - угол опережения - угол опережения
ИВС применяются для рекуперационного торможения а реверсивных преобразователях, при этом в сеть возвращается активная мощность, но потребляется реактивная из за большого сдвига фаз между током и напряжением. Форма выходного тока близка к прямоугольной, что вызывает появление высших гармоник, для уменьшения влияния применяют L-C сглаживающие фильтры.
В приводе на постоянном токе при торможении ЭДС якоря складывается с ЭДС реактора превышает напряжение сети. Активная мощность , отдаваемая двигателем определяется 
Реактивная мощность потребляемая из сети : 
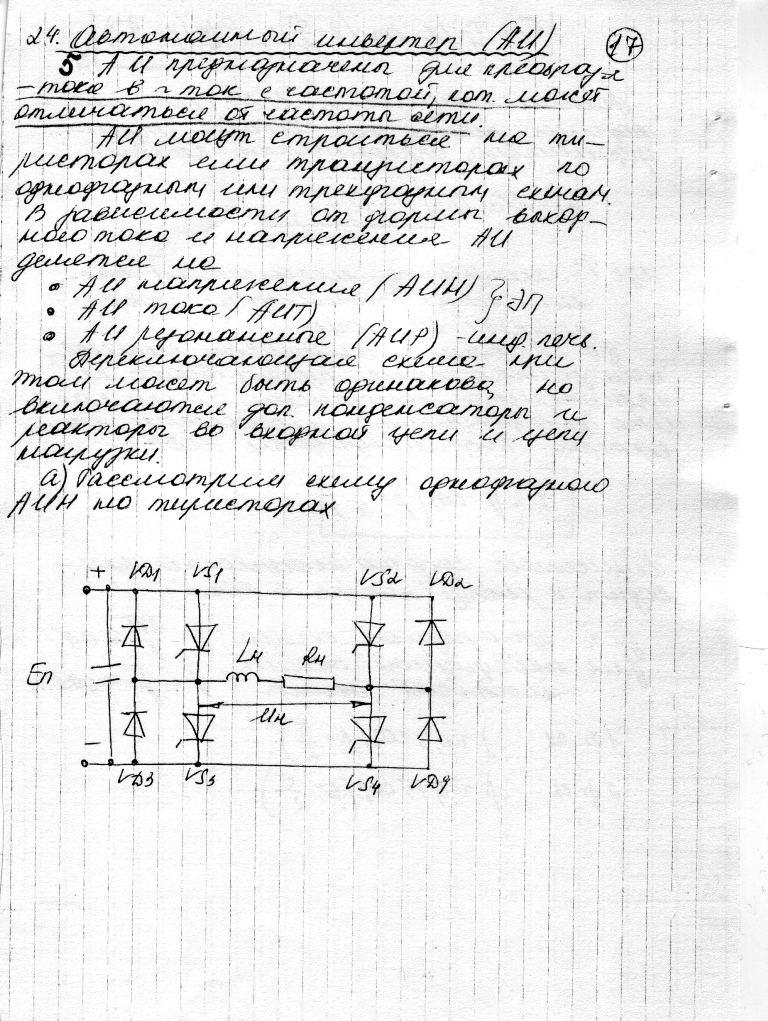
б) автономный инвертор (АИ)
Могут быть построены на тиристорах или транзисторах, по 1-о фазной или 3-х фазной схеме. Автономные инверторы делятся на :
- АИ напряжения (АИН)
- АИ тока (АИТ)
- АИ резонансные (АИР)
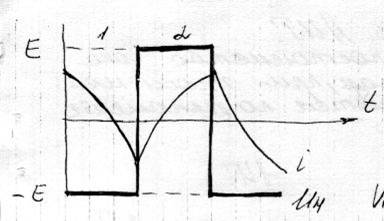
Рассмотрим схему однофазного АИН на тиристорах
- максимальное значении обратного напряжения
- максимальное значение тока при активной нагрузке : максимальное значение тока при активной нагрузке : 
- для активно-индуктивной :  ; ; 
в первый полупериод открыты VS1 и VS4; во второй VS2 и VS3
Аин обеспечивает постоянство напряжения на нагрузке в каждый момент времени. Ток при этом изменяется по экспоненте с постоянной времени 
18. Влияние силовых преобразователей на системы электроснабжения, определение их энергетических показателей.
19. Электрические печи сопротивления.
20. Дуговые электрические печи и установки.
21. Индукционные плавильные печи и установки.
22. Общие сведения об электросварке. Источники питания сварочной дуги. Машины для точечной и роликовой сварки.
23. Электролиз и его промышленное применение. Гальванические установки.
24. Основные характеристики электропривода с синхронным двигателем.
На статоре с.д. расположена 3-х фазная обмотка создающая вращающее магнитное поле. Ротор с постоянными магнитами вращается со скоростью магнитного поля. Для питания обмотки ротора служит генератор постоянного тока небольшой мощности, который называется возбудителем. Промышленностью выпускается СД-2, СД-3, СД- 4, СДК=Р=130-1000 кВт и более. Основным преимуществом мощных СД является высокий коэффициент мощности, cos , близкий к 1. Повышение cos необходимо для уменьшения потерь энергии в линиях электропередач. При увеличении тока возбуждения cos увеличивается и СД может работать в режиме компенсатора реактивной мощности. Целесообразно использовать СД при мощности более 300 кВт. Преимуществом СД являются абсолютно жесткие характеристики.
Ротор двигателя движется синхронно с магнитным полем статора, отставая от него на угол  , зависящий от электромагнитного момента. Для пуска СД на роторе имеется дополнительная к/з обмотка (типа беличье колесо). , зависящий от электромагнитного момента. Для пуска СД на роторе имеется дополнительная к/з обмотка (типа беличье колесо).
При увеличении момента сопротивления увеличивается угол отставания ротора от вектора магнитного поля статора и момент двигателя пропорционален напряжению и ЭДС, наводимая ротором, и синусу угла отставания ротора.
В номинальном режиме угол отставания составляет 25-30 градусов. При увеличении угла более 90 градусов, при увеличении момента выше максимального двигатель выходит из синхронизма и останавливается.
Для явнополюсной машины добавляется реактивная составляющая момента пропорционально sin 2, которая искажает зависимость момента от угла. При малых отклонениях угла от 0 можно считать, что момент двигателя пропорционален углу .
где СЭМ – коэф. жесткости электромагнитной пружины

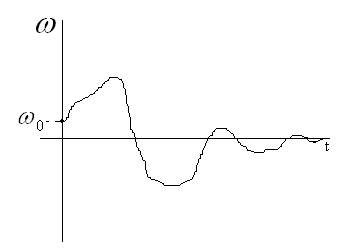
В переходных процессах СД ведет себя как электромагнитная пружина, т.е. возникают колебания угла отставания и момента двигателя. Короткозамкнутая обмотка, которая устанавливается на роторе двигателя, создает асинхронный момент, который демпфирует колебания момента двигателя.
В автоматике применяются шаговые и вентильные двигатели, которые по принципу действия являются синхронными, но работают только с электронными блоками управления.
Шаговые двигатели преобразуют импульсы тока в дискретные перемещения выходного вала. Угол поворота (шаг) пропорционален числу управляющих импульсов. По конструкции шаговые двигатели бывают с возбужденным или невозбужденным ротором. Двигатели с возбужденным ротором виде постоянного магнита имеют более высокий момент и мощность, но минимальный шаг составляет 10-15 градусов. Такие двигатели применяются в приводе подач, мощностью до 0,5 кВт, токарных и электроэрозионных станков. Для поворота ротора импульсы тока от блока управления поочередно подаются на 1-ю или на 2-ю обмотку. При двухтактном управлении импульсы тока одновременно могут подаваться на обе обмотки и минимальный угол поворота уменьшается в два раза. Преимуществом 2-х тактных является то, что момент двигателя возрастает в 1,5 раза.
Двигатели с невозбужденным ротором имеют ротор в виде набора электротехнической стали с полюсами.
  , где р – число пар полюсов, n – число тактов управления, m – , где р – число пар полюсов, n – число тактов управления, m –
число полюсов на роторе
Основным преимуществом шаговых двигателей является то, что они бесконтактные, недостатком – сложность управления. Вентильный двигатель – это синхронный двигатель с датчиком положения ротора, работающий под управлением электронных вентилей (транзисторов или тиристоров). Вентильный двигатель имеет механические характеристики и динамику, подобные двигателю постоянного тока с независимым возбуждением.
Т.к. вентильный двигатель является бесконтактным, отсутствует щеточно-коллекторный узел, то повышается надежность и КПД 90 %. 90 %.
Рассмотрим упрощенную функциональную схему вентильного двигателя.
БУК – блок управления коммутацией;
ДПР – датчик положения ротора.
БУК – формирует импульсы тока в трехфазной обмотке статора под действием магнитного поля статора ротор с постоянными магнитами или электромагнитами поворачивается на определенный угол.
ДПР – выдает сигнал в БУК для изменения направления тока в обмотках статора чтобы сохранить постоянство вращения. В качестве ДПР применяются фотоимпульсные, индуктивные датчики Холла. В датчиках Холла под действием магнитного потока изменяется выходная ЭДС.
Промышленностью выпускаются вентильные двигатели: ДВУ, 2ДВУ, с постоянными магнитами на роторе мощностью 1-7 кВт и 0,07-22 кВт соответственно.
В мощных ЭП на нефтепроводах, цементных и химических заводах применяются вентильные двигатели серии ВД мощностью 200-3150 кВт, ПЧВС мощностью 2-20 МВт с тиристорными преобразователями (с электромагнитами на роторе).
Недостатком является сложность управления и большая стоимость.
В настоящее время разрабатываются вентильные индукторные двигатели ВИД или ВРД с невозбужденным ротором наподобие шаговых двигателей, которые имеют меньшую стоимость. Преимуществом является высокий КПД около 90 % даже при малой мощности |
|
|
 Скачать 3.9 Mb.
Скачать 3.9 Mb.