особенности. Мехатроника доклад. Доклад Роботы кр. 410400. 15. 03. 06. 122021. Пз студент группы мр. 1211
 Скачать 1.35 Mb. Скачать 1.35 Mb.
|

|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования «Иркутский государственный университет путей сообщения» (ФГБОУ ВО ИрГУПС) Факультет «Транспортные системы» Кафедра «Автоматизация производственных процессов» Доклад Роботы КР. 410400.15.03.06.12-2021.ПЗ
Иркутск 2021 Содержание Историческая справка Основная конструкция и принцип действия Расчёт показателя Функциональная схема Расчёт показателя Структурная схема Заключение Предложения по увелечению степени Интеграции Доказательство, что система мехатронная Список литературы Историческая справка. Отсчёт времени возникновения современных роботов следует вести с 1956 г., когда в США были созданы первые промышленные манипуляторы с программным управлением, получившие общепринятое название промышленных роботов (ПР) и поступившие с 1961 г. в коммерческую эксплуатацию. В 1956 г. американский инженер Джордж К. Девол сформулировал принципы применения теории управления в решении общих задач оптимального перемещения предметов труда и материалов в производственном процессе, установив, что управление погрузочно-разгрузочными и транспортными механизмами и процессами может быть поручено компьютеру. Относительная простота программирования управляющего компьютера становится основой для создания гибкого оборудования, пригодного для эффективной работы в изменяющихся условиях производства. Такой подход и обусловил создание первых механических манипуляторов с программным управлением, т.е. промышленных роботов. Патентная заявка на программируемый манипулятор была сделана Р. Деволом в 1954 г., а в 1959 г. он и инженер—конструктор Джозеф Ф. Энгельбергер изготовили первый работающий робот «Unimate», который с 1961 г. был введен в эксплуатацию на литейном участке заводов фирмы «GeneralMotors».  Создание первого робота «Unimate». Основная конструкция и принцип действия 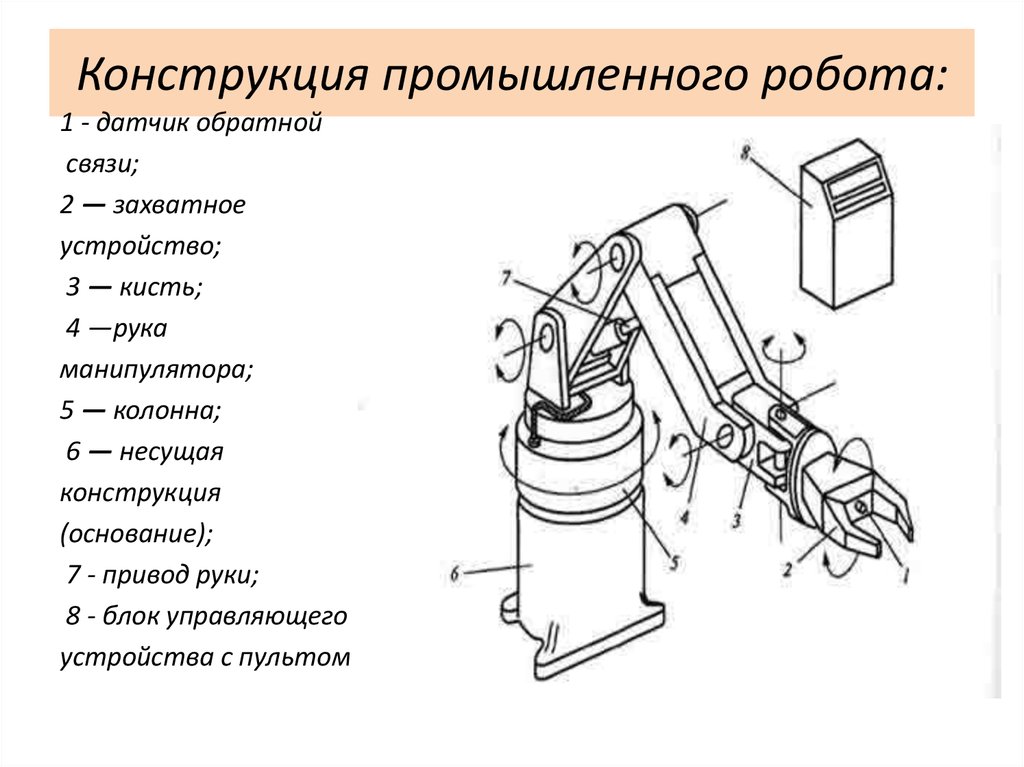 Одной из важнейших характеристик роботов является то, что они оснащены всевозможными датчиками с которых снимается информация о внешней среде и в зависимости от результатов обработки этих данных, корректируют свои действия. В большинстве случаев роботы состоят из таких частей, как манипуляторы, имеющие несколько степеней свободы, специальных приводов, обеспечивающих их передвижение в пространстве, а также перепрограммируемых устройств управления. В общем и целом можно считать, что любой современный робот представляет собой ни что иное, как единый, нацеленный на выполнение определенных функций, механизм, состоящее из определенных блоков, каждый из которых имеет свое собственное функциональное назначение. Алгоритм действий робота задается программой. Он включает несколько характерных этапов: Определение местонахождения нужного предмета (детали) в пространстве и перемещение рабочего органа к нему. При стационарной установке ПР движется только манипулятор. Для осуществления функции транспортировки перемещается сам робот. Захват предмета. Подается команда на рабочий орган. Перемещение предмета по заданной траектории и установка его в рабочей зоне. Осуществление технологической операции (обработка детали, покраска, сварка, упаковка и т. п.). Съем готовой детали и удаление ее из рабочей зоны. Перемещение ее в место складирования. Возвращение манипулятора или всего робота в исходное положение. Современные ПР оснащены сенсорной системой, способной обеспечить обратную связь. При изменении внешних условий (например, изменился размер предмета или его местонахождение) датчики фиксируют расхождение с программой и сообщают фактические данные. Функциональная схема. 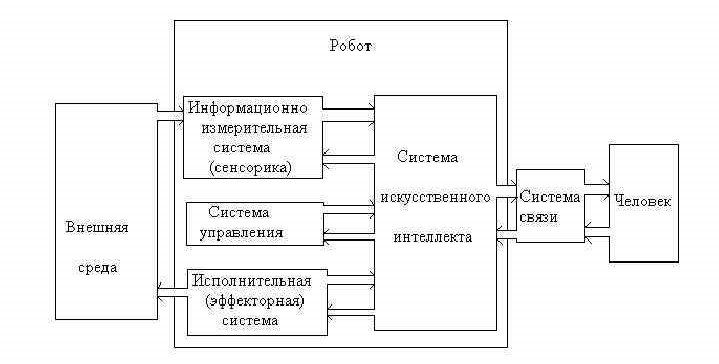 Функциональная схема робота. Структурная схема. 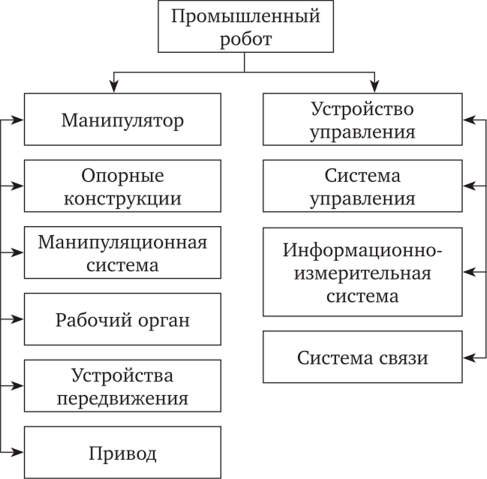 Опорные конструкции служат для размещения всех устройств и агрегатов ПР, а также для обеспечения необходимой прочности и жесткости манипулятора. Манипуляционная система предназначена для переноса и ориентации рабочего органа или объекта манипулирования в заданную точку рабочей зоны и представляет собой многозвенный пространственный механизм с разомкнутой кинематической цепью. Рабочий орган манипулятора ПР, необходимый для непосредственного воздействия на объект манипулирования при выполнении технологических операций или вспомогательных переходов, представляет собой захватное устройство или рабочий инструмент. Устройство передвижения служит для перемещения манипулятора или ПР в целом в необходимое место рабочего пространства и состоит из ходовой части и приводных устройств. Привод предназначен для преобразования подводимой энергии в механическое движение исполнительных звеньев манипулятора в соответствии с командными сигналами, поступающими от системы управления, и в общем виде содержит энергоустановку, двигатели и передаточные механизмы. Система управления необходима для непосредственного формирования и выдачи управляющих сигналов и состоит из пульта управления, запоминающего устройства, вычислительного устройства, блоков управления приводами манипулятора и технологическим оборудованием. Информационно-измерительная система предназначена для сбора и первичной обработки информации для системы управления о состоянии элементов и ПР и внешней среды, входит в состав устройства управления ПР и включает в себя устройство обратной связи, устройство сравнения сигналов и датчики обратной связи. Система связи предназначена для связи системы управления роботом с управляющими системами более высокого уровня, в частности для работы ПР в составе робото-технологического комплекса синхронно со станками, транспортом и другим оборудованием. Заключение. В современной жизни человек уже использует роботов во всех сферах своей деятельности. В большинстве своём роботы являются не заменимыми помощниками, но всё чаще они используются там, где человек справлялся без особого труда. Благодаря своему интеллекту человек развил науку, и смог создать робототехнику, но из-за своей лени он всё чаще стремится заменить свой труд роботами. Но и этого человеку мало, теперь человек пытается создать, для своих роботов, искусственный интеллект. С искусственным интеллектом роботы смогут самостоятельно оценивать происходящее вокруг них и принимать решения по действиям, которые им необходимо произвести. Человеку не надо уже будет тратить силы и время на подачу необходимых команд и алгоритмов. Список литературы. 1)https://maxpark.com/community/4854/content/1521221 - Заметки по истории робототехники 2)http://gk-drawing.ru/line-module/mechanisms/robot-mechanisms.php - Механизмы роботов 3)https://vektorus.ru/blog/promyshlennaya-robototehnika.html#funkcii-pr-princip-raboty - Промышленные роботы в современном производстве 4)https://studme.org/390056/tehnika/sostavnye_chasti_konstruktsii_tehnicheskie_harakteristiki_promyshlennyh_robotov - Составные части, конструкции и технические характеристики промышленных роботов |