вопросы. Теория автоматического управления. Е. С. Тетерин 2021 г
 Скачать 191.79 Kb. Скачать 191.79 Kb.
|

|
Министерство науки и высшего образования РФ Федеральное государственное автономное образовательное учреждение высшего образования «Южно–Уральский государственный университет» (Национальный исследовательский университет) Институт открытого и дистанционного образования ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОй работе по дисциплине Теория автоматического управленияЮУрГУ– 09.03.01.2021.244. ПЗ КР
Челябинск 2021 Министерство науки и высшего образования РФ Федеральное государственное автономное образовательное учреждение высшего образования «Южно–Уральский государственный университет» (Национальный исследовательский университет) Институт открытого и дистанционного образования Кафедра техники, технологии и строительства Направление «Информатика и вычислительная техника» Утверждаю Заведующий кафедрой ___________ ___________________ 2021г. ЗАДАНИЕ на курсовую работу студента Тетерин Евгений Сергеевич Группа ДО-410 1 Дисциплина: Теория автоматического управления 2 Тема проекта: Замкнутая система автоматического управления 3 Срок сдачи студентом законченной работы: ______________2021 г. Перечень вопросов, подлежащих разработке: - Произвести выбор последовательного регулятора;- Удовлетворять показателям качества в соответствие с вариантом задания.5 Календарный план
Руководитель проекта _____________________________// К.М. Виноградов (подпись) Студент _________________________// Е.С. Тетерин (подпись)  АННОТАЦИЯ АННОТАЦИЯТетерин Е.С. Теория автоматического управления. – Челябинск: ЮУрГУ, 2021. – 19 с. библиогр. список – 10 наим. Целью работы является для замкнутой системы автоматического управления (САУ) с отрицательной (единичной) обратной связью, произвести выбор последовательного регулятора (корректирующего устройства). ОГЛАВЛЕНИЕпо дисциплине Теория автоматического управления 1 ВВЕДЕНИЕ 6 1 Выбор последовательного регулятора 10 ЗАКЛЮЧЕНИЕ 17 ВВЕДЕНИЕТеория автоматического управления (ТАУ) является базовой основой кибернетики или науки об управлении – одной из относительно молодых областей науки. Теория управления, хотя и прошла яркий путь своего развития, но в настоящее время продолжает интенсивно развиваться в сторону создания теории интеллектуальных систем управления – предельной формации парадигмы теории управления. Прикладную или инженерную ТАУ сегодня именуют «классической», подчеркивая этим определенную завершенность форм ее развития как науки об управлении. Классическая ТАУ, преследуя цель «оптимизации в малом», решает задачи оптимизации и адаптации при малых отклонениях относительно заданного режима работы системы управления. Теория автоматического управления (ТАУ) относится к классу важнейших общеспециальных дисциплин, входящих во все типовые программы инженерного образования, ТАУ изучает процессы управления, методы исследования и основы проектирования систем автоматического управления (САУ). ТАУ изучает принципы построения САУ, закономерности протекающих в них процессов в целях построения работоспособных и точных САУ. Методами ТАУ осуществляются анализ и синтез САУ. В данном курсовом проекте решаются задачи, связанные с анализом и синтезом САУ, относящиеся к «классической» ТАУ. Исходными данными для выполнения курсового проекта являются структурная схема замкнутой автоматической системы регулирования, параметры входящих в нее звеньев и требуемые показатели качества. 1 Для замкнутой системы автоматического управления (САУ) с отрицательной (единичной) обратной связью, структурная схема которой в разомкнутом состоянии изображена на рисунке 1 (передаточные функции звеньев, согласно варианта задания, представлены в таблице 1), произвести выбор последовательного регулятора (корректирующего устройства), исходя из требований, что проектируемая система должна: 1.1 воспроизводить постоянное входное воздействие с нулевой установившейся ошибкой (система должна иметь астатизм первого порядка); 1.2 удовлетворять показателям качества в соответствие с вариантом задания (таблица 2). 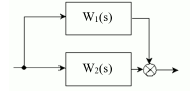 Рисунок 1 – Структурная схема исходной САУ в разомкнутом состоянии Таблица 1 – Передаточные функции звеньев исходной системы 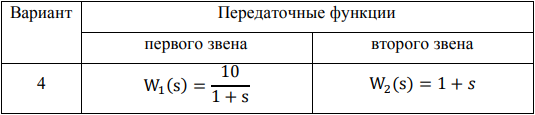 Таблица 2 – Показатели качества проектируемой САУ  2 Провести анализ полученной САУ. 2.1 Подтвердить факт, что полученная САУ с последовательным регулятором (корректирующим устройством) удовлетворяет заданным показателям качества в соответствие с вариантом задания. Для этого определить и построить график переходной характеристики системы. Переходную характеристику системы возможно вычислить аналитически с помощью обратного преобразования Лапласа. Графики полученной функции можно построить с помощью одной из программ SMath Studio, Excel, OpenOffice Calc или других аналогичных. 2.2 Исследовать устойчивость полученной САУ. Выполнение курсовой работы проводится в два этапа: – исследование линейной системы автоматического регулирования; – синтез корректирующего устройства, построение переходного процесса скорректированной системы и оценка качества регулирования. 1 Выбор последовательного регулятораИсходная структурная замкнутой системы будет иметь вид: 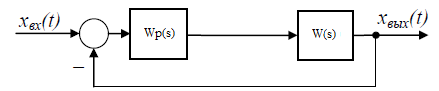 Рис. 1.1 – Структурная схема исследуемой системы При этом, структура блока W(s) имеет вид: Рис. 1.2 – Структура САУ в разомкнутом состоянии без регулятора Определим ПФ разомкнутой САУ без регулятора и сведём её к стандартному виду: 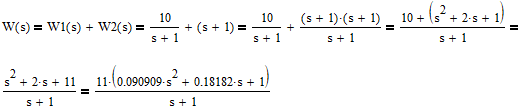 Запишем уравнение асимптотической ЛАЧХ и построим ЛАЧХ данного звена: 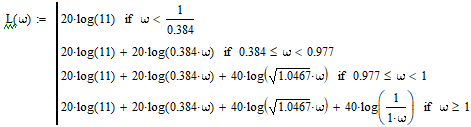 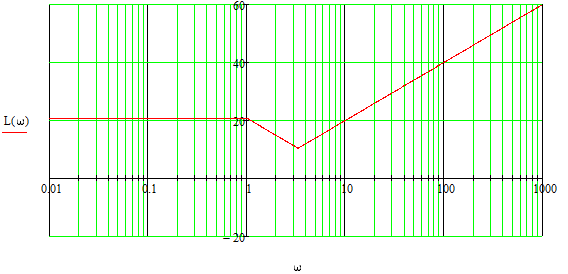 Рис. 1.3 – Асимптотическая ЛАЧХ разомкнутой нескорректированной системы Далее построим желаемую ЛАЧХ. При построении желаемой ЛАЧХ выделяют 3 участка. Низкочастотная область желаемой ЛАЧХ строится исходя из требований к точности скорректированной системы. По условию, система должна исключать статическую ошибку; при этом требования к величине скоростной ошибки не указаны. Поэтому вводим в систему интегратор. Это означает, что низкочастотный участок желаемой ЛАЧХ должен идти под наклоном «-20 дБ/дек» Среднечастотный участок желаемой ЛАЧХ строится по требованиям переходного процесса с использованием номограмм Солодовникова: 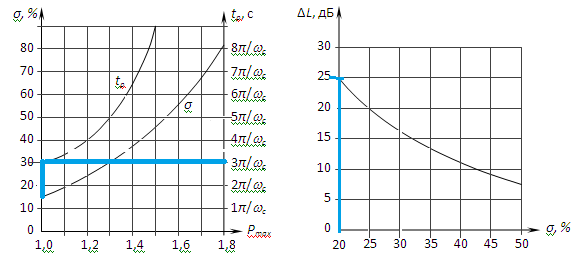 а) б) Рисунок 1.4 – Номограммы Солодовникова По условию, перерегулирование σ не должно превышать 17%. По номограмме Солодовникова (а) определяем формулу для зависимости времени регулирования tp и частоты среза ωср:  По номограмме Солодовникова (б) определяем протяжённость среднечастотного участка: ΔL = 25 дБ (в случае надобности, его можно продлить). Высокочастотный участок желаемой ЛАЧХ не влияет на динамические свойства системы, и строится из удобства расчёта звена КУ. Также отметим, что ЛАЧХ желаемой системы не может иметь в высокочастотной области наклон «+20 дБ/дек», т.к. такое звено не может быть физически реализовано. Высокочастотный участок желаемой ЛАЧХ продолжает идти под наклоном «-20 дБ/дек» Строим желаемую ЛАЧХ: 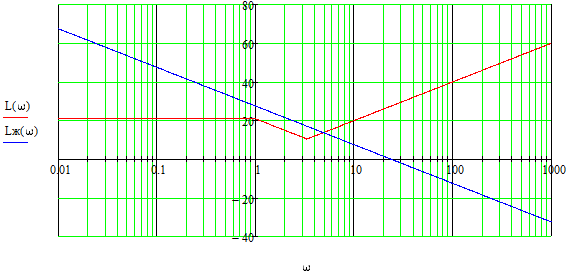 Рисунок 1.5 – Желаемая ЛАЧХ ЛАЧХ КУ находим, вычитая из желаемой ЛАЧХ исходную располагаемую ЛАЧХ: 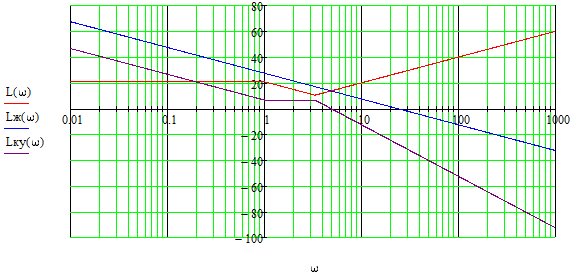 Рисунок 1.6 – ЛАЧХ КУ По ЛАЧХ КУ восстанавливаем ПФ последовательного КУ: 2 Основная часть Рис. 2.1 – Структурная схема исследуемой системы Тогда ПФ желаемой разомкнутой системы примет вид: 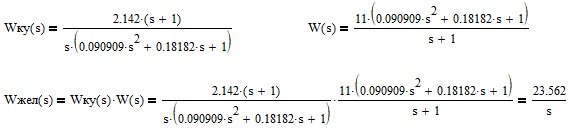 Тогда эквивалентная ПФ замкнутой скорректированной системы примет вид: 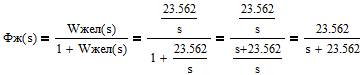 Чтобы найти уравнение переходной характеристики h(t), нужно домножить ПФ замкнутой системы на 1/s (изображение единичного ступенчатого сигнала по Лапласу) и выполнить обратные преобразования Лапласа полученного выражения: 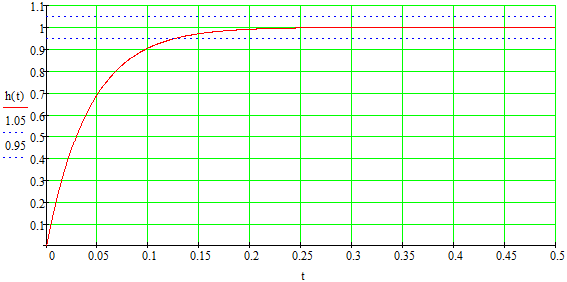 Рис. 2.2 – Переходная характеристика замкнутой скорректированной системы Установившееся значение составляет 1, следовательно, статическая ошибка отсутствует. Время регулирования составляет: tp = 0,125 c < 0,4 c. Перерегулирование составляет: σ = 0% < 17%. Требования, установленные в техническом задании, выполняются. Далее оценим устойчивость замкнутой системы. Выделяем характеристический полином замкнутой системы – знаменатель ПФ замкнутой системы: По критерию Гурвица, для систем с полиномом 1 порядка, необходимым и достаточным условием устойчивости является положительность всех коэффициентов характеристического полинома. Условие выполняется; скорректированная система устойчива. ЗАКЛЮЧЕНИЕМетодом логарифмических частотных характеристик синтезировано последовательное корректирующее устройство, ввод которого позволит обеспечить требуемые показатели качества скорректированной системы, а именно: нулевую статическую ошибку, а также время регулирования и пере-регулирование. Проверка показала, что скорректированная система отвечает заданным показателям качества и устойчива, что свидетельствует о правильности рас-чётов. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1 Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1972 - 768 с 2 Кирьянов Д. В. К43 Mathcad 15/Mathcad Prime 1.0. — СПб.: БХВ-Петербург, 2012. — 432 с.: ил. 3 Леонов Р. Е. Решение типовых линейных задач в системе МАТЛАБ: учебное пособие / Р. Е. Леонов. Екатеринбург: Изд-во УГГУ, 2012. 168 с. 4 Лукас Л. А., Барановский В. П. Теория автоматического управления. Часть 1. Математическое описание, анализ устойчивости и качества линейных непрерывных систем управления: курс лекций / В. А. Лукас, В. П. Барановский. Екатеринбург: Изд-во УГГУ, 2007. 226 с. 5 Лукас В. А., Барановский В. П. Основы теории автоматического управления: учебное пособие / В. А. Лукас, В. П. Барановский. Екатеринбург: Изд-во УГГУ, 2007. 190 с. 6 Поршнев С.В., Беленкова И.В. «Численные методы на базе Mathcad». 2005, 464 с. Размер 14.3 Мб, формат pdf. 7 Радиоавтоматика: Учеб. пособие для студ. вузов спец. «Радиотехника»/В. А. Бесекерский, А. А. Елисеев, А. В. Небылов и др.; Под ред. В. А. Бесекерского.— М.: Высш. шк., 1985. — 271 с. 8 Солодовников В.В., Плотников В.Н., Яковлев А.В. Теория автоматического управления техническими системами: Учеб. Пособие. – М.: Изд-во МГТУ, 1993. – 492 с., ил. 9 Теория автоматического управления: Учеб. для вузов по спец. «Автоматика и телемеханика». В 2-х ч. Ч. I. Теория линейных систем автоматического управления / Н. А. Бабаков, А. А. Воронов, А. А. Воронова и др.; Под ред. А. А. Воронова.—2-е изд., перераб. и доп. — М.: Высш. шк., 1986. — 367 с. 10 ТЕХНИЧЕСКАЯ КИБЕРНЕТИКА. Теория автоматического регулирования. Книга 1. Математическое описание, анализ устойчивости и качества систем автоматического регулирования. Колл. авторов. Под ред. д-ра техн. наук, проф. В. В. Солодовникова, изд-во «Машиностроение», 1967, стр. 770.  |