Курсовой проект по ЭКГ-4,6Б. Электропривод механизма (технологического комплекса) подъема экскаватора экг5А
 Скачать 1.44 Mb. Скачать 1.44 Mb.
|

Исходные данныеТаблица 1.1 - Исходные данные
Таблица 1.2 - Технические данные двигателя механизма подъёма
Таблица 1.3 - Технические данные генератора механизма подъёма
Таблица 1.4 - Параметры экскаватора-драглайна ЭКГ-5А
1.2 Задание на выполнение курсовой работы по дисциплине «Теория электропривода»  Рисунок 1.2 – Изображение задания курсового проекта 2 Расчёт статических нагрузок механизма и параметров двухмассовой схемы замещения В этой главе произведён расчёт параметров передаточных функций элементов двухмассовой схемы замещения. Схема замещения приведена на рисунке 2.1. 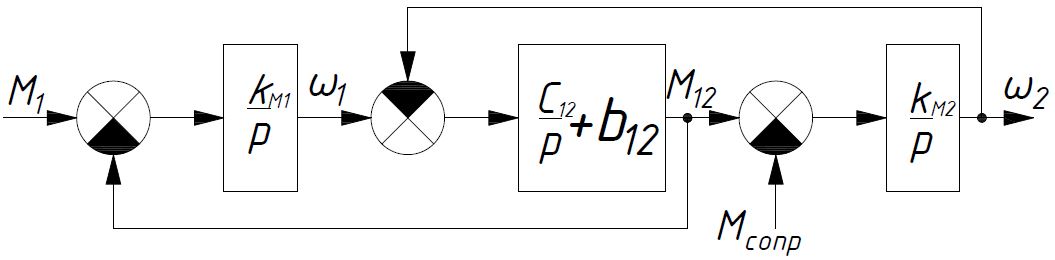 Рисунок 2.1 – Двухмассовая схема замещения 2.1 Количество электродвигателей:  = 1 = 12.2 Номинальная угловая частота вращения электродвигателя и номинальный момент:   2.3 Коэффициент превышения момента двигателя в переходных режимах пуска над номинальным λ находится в пределах 1,8…2,0. Задаёмся λ=1,9. 2.4 Стопорный момент всех электродвигателей в приводе:  2.5 Приведённый к валу двигателя момент инерции второй массы:  2.6 Коэффициент передачи передаточной функции звена «вторая масса» в именованных и относительных единицах:   2.7 Момент сил статического сопротивления, приведённый к валу двигателя, и относительное значение момента сил сопротивления:  2.8 Суммарный момент инерции электрических двигателей привода и жёстко связанных с ним механизмов:  2.9 Коэффициент передачи передаточной функции звена «первая масса» в именованных и относительных единицах:   2.10 Жёсткость упругого звена по известной длине каната, числу, диаметру канатов и модулю упругости. Коэффициент заполнения сечения стрелы и участка от головных блоков до ковша, расположенного на 2/3 длины стрелы:     2.11 Параметры передаточной функции упругого звена в именованных и относительных единицах:    2.12 Определение соотношения масс  и частоты собственных колебаний (частоты резонанса) механической системы: и частоты собственных колебаний (частоты резонанса) механической системы:  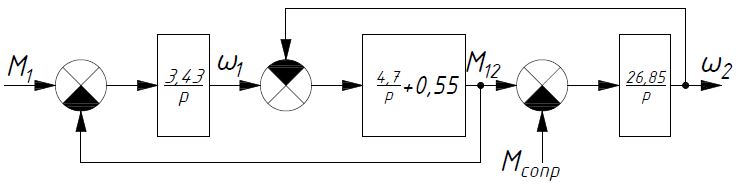 Рисунок 2.2 – Двухмассовая схема замещения в именованных единицах 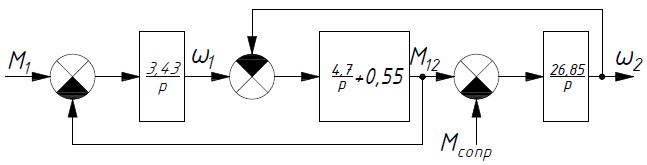 Рисунок 2.3 – Двухмассовая схема замещения в относительных единицах 3 Расчёт параметров структурной схемы силовой части электропривода постоянного тока Силовая часть электропривода постоянного тока включает в себя управляемый преобразователь и электрический двигатель. В качестве управляемого преобразователя применяют генераторы или тиристорные преобразователи. Для питания обмотки возбуждения генераторов применяют тиристорные преобразователи. Входным воздействием силовой части электропривода является сигнал управления, вырабатываемый системой управления в соответствии с законом управления, выходными переменными являются вращающий момент и частота вращения электродвигателя. Возмущающим воздействием является момент сил сопротивления движению (рисунок 3.1).  Рисунок 3.1  Структурная схема электропривода Структурная схема электроприводаЗначительное влияние на характер процессов в силовой части электропривода оказывает внутренняя обратная связь по ЭДС вращения, темп изменения которой зависит от темпа изменения частоты вращения якоря электродвигателя, определяемым, в свою очередь, моментом инерции вращающихся масс электропривода. Расчет параметров силовой части электропривода выполняют по схеме замещения (рисунок 3.2).  Рисунок 3.2 - Схема замещения якорной цепи силового модуля электропривода 3.1 Суммарное сопротивление обмоток якоря генератора и двигателя, учитывая схему соединения, по паспортным данным электрических машин:    3.2 Индуктивность якорных обмоток генератора и двигателя и суммарная индуктивность с учётом схемы соединения электрических машин:     3.3 Расчёт постоянной времени обмотки якоря:  3.4 Параметры передаточной функции якорной цепи в именованных и относительных единицах:    3.5 Номинальная ЭДС генератора:  3.6 Значение стопорного тока:  3.7 Коэффициент усиления генератора:  3.8 Постоянная времени передаточной функции обмотки возбуждения генератора:  где σ – коэффициент, учитывающий рассеяние магнитного потока (σ = 1,15…1); ∆  – приращение потока в рабочей точке для соответствующего приращения тока возбуждения; – приращение потока в рабочей точке для соответствующего приращения тока возбуждения; – число витков обмотки возбуждения; – число витков обмотки возбуждения;∆  – приращение тока возбужденя. – приращение тока возбужденя.3.9 Параметры передаточной функции обмотки возбуждения генератора в именованных и относительных единицах:   3.10 Определим параметры передаточной функции обмотки возбуждения генератора в именованных единицах:  3.11 Коэффициент усиления в именованных и относительных единицах тиристорного преобразователя для питания обмотки возбуждения генератора:   Т.к. в нашем случае система Г-Д, то базовое напряжение ТП:  Подставляем параметры передаточных функций (в именованных и относительных единицах) в структурную схему силовой части электропривода, результаты представлены на рисунках 3.3 и 3.4 соответственно. Для построения алгоритмических структурных схем необходимо найти передаточную функцию, связывающую момент двигателя  и ток якоря и ток якоря  . .3.13 Эта функция в именованных единицах:  в относительных:  Алгоритмические структурные схемы, построенные на основании расчётов двух разделов и параметры передаточных функций представлены в приложении 1. 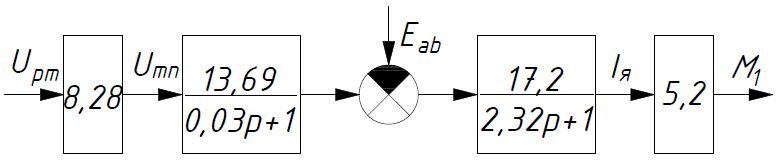 Рисунок 3.3 – Структурная схема силовой части электропривода в именованных единицах 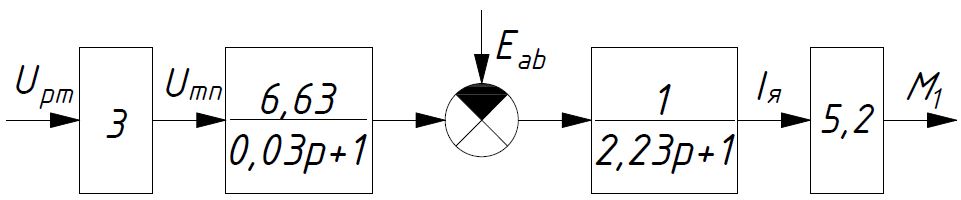 Рисунок 3.4 – Структурная схема силовой части электропривода в относительных единицах | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






 С, Ом·
С, Ом· :
:





























