Курсовой проект по ЭКГ-4,6Б. Электропривод механизма (технологического комплекса) подъема экскаватора экг5А
 Скачать 1.44 Mb. Скачать 1.44 Mb.
|

|
4 Расчёт передаточных функций регуляторов тока и скорости Решение задач автоматизации технологических процессов тесно связано с совершенствованием систем электропривода основных рабочих механизмов горных машин. Получившие распространение системы подчиненного регулирования состоят из типовых контуров, число которых, как правило, равно числу регулируемых параметров, таких, например, как ток якоря, скорость двигателя, натяжение канатов. Достоинствами систем электропривода, построенных по принципу подчиненного регулирования координат, являются простота расчета, настройки и ограничения предельных значений промежуточных координат системы. В экскаваторном электроприводе использованы, как правило, двухконтурные системы подчиненного регулирования координат электромеханических систем. При, этом внутренним является контур тока и внешним — контур скорости. На рис. 4.1 приведена структурная схема контура тока, на рис. 4.2 — контура скорости. 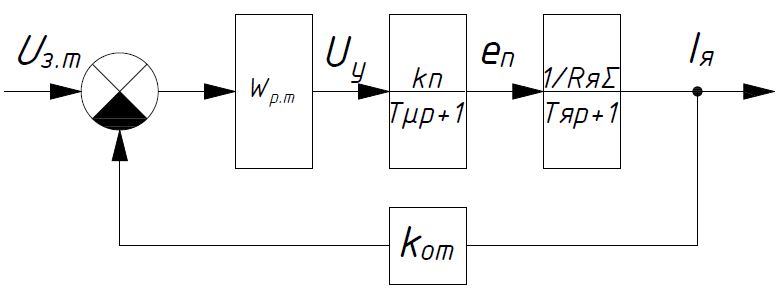 Рисунок 4.1 – Структурная схема контура тока 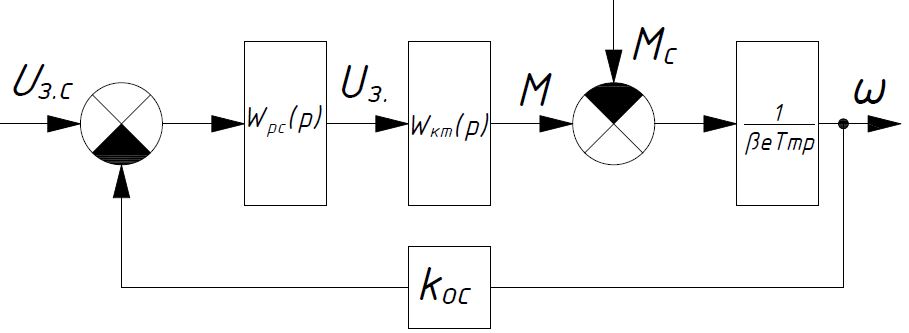 Рисунок 4.2 – Структурная схема контура скорости 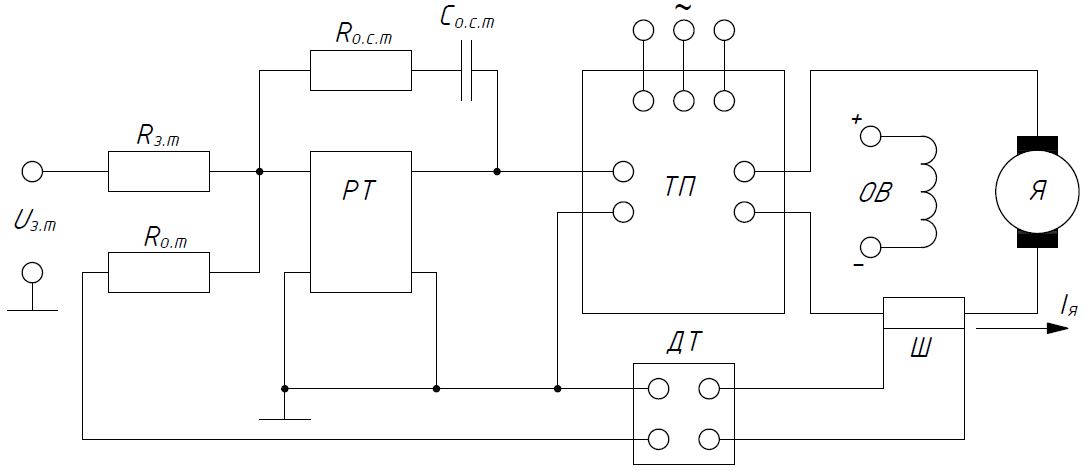 Рисунок 4.3 – Схема электропривода с контуром регулирования тока 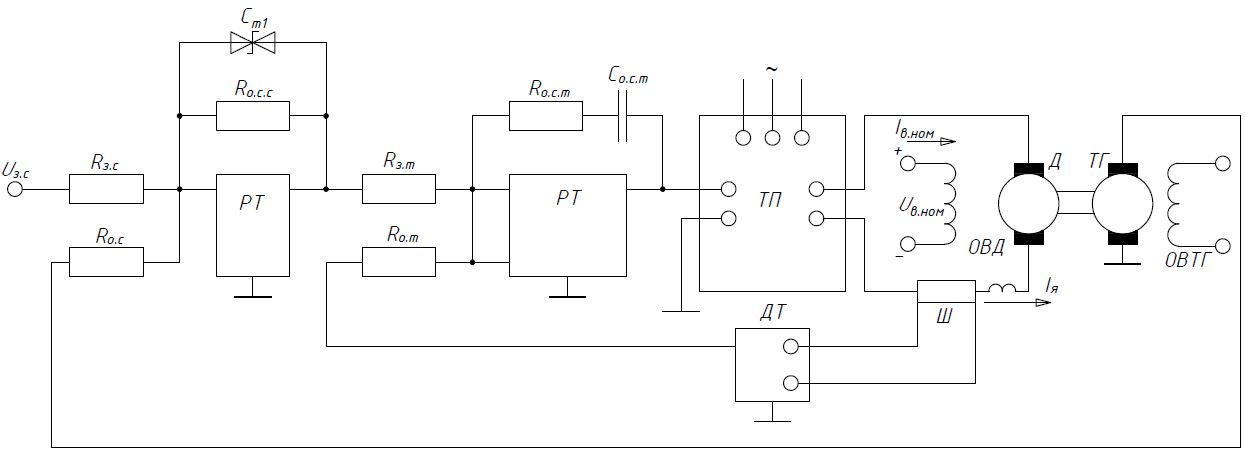 Рисунок 4.4 – Схема электропривода с контуром регулирования тока и внешним контуром регулирования скорости Таблица 4.1 - Данные двигателя
Таблица 4.2 – Данные реверсивного тиристорного преобразователя
4.1 Коэффициент усиления преобразователя:  4.2 Суммарное сопротивление якорной цепи:     4.3 Значение  , приведённое к задающей цепи: , приведённое к задающей цепи:    4.4 Коэффициент усиления регулятора:    4.5 Стопорный ток электропривода:  4.6 Максимальное напряжение здания тока:  4.7 Коэффициент ЭДС двигателя:  4.8 Стопорный момент:  4.9 Электромеханическая постоянная времени:  4.10 Относительная ошибка регулирования момента и тока в процессе пуска с  = 0: = 0: 4.11 Абсолютная ошибка по току (расхождение между статической и динамической механическими характеристиками):  4.12 Абсолютная ошибка при пуске с = 1,98 кН·м: 4.13 Желаемая для настройки на технический оптимум передаточная функция разомкнутого контура регулирования тока:  4.14 Передаточная функция объекта регулирования:   4.15 Передаточная функция регулятора тока:  4.16 Коэффициент усиления регулятора скорости при  : :   Коэффициент обратной связи:   4.17 ЭДС тахогенератора при  : : 4.18 Сопротивление:   при  4.19 Передаточные функции для структурной схемы контура скорости:   Подставляем параметры передаточных функций в структурную схему электропривода постоянного тока с унифицированным контуром регулированием тока якоря, результаты представлены на рисунке 4.5 и в структурную схему контура регулирования скорости при настройке токового контура на технический оптимум, результаты представлены на рисунке 4.6. 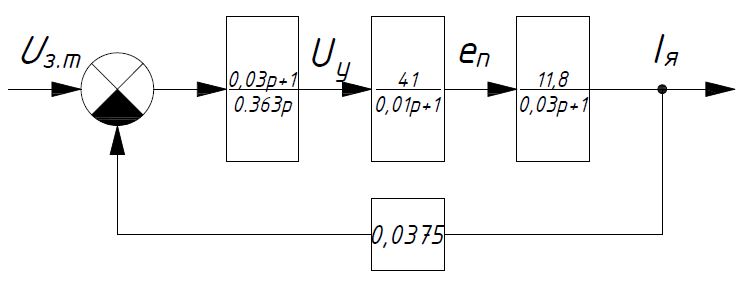 Рисунок 4.5 – Структурная схема контура регулирования тока 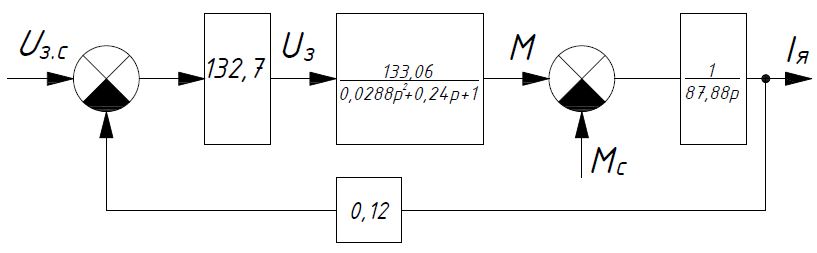 Рисунок 4.6 – Структурная схема контура регулирования скорости 5 Расчёт статических и динамических характеристик электропривода аналитическими методами диаграммы электропривода Расчёт статических характеристик произведём при двух значениях напряжения задания скорости 5 и 10 В. 5.1 Уравнение электромеханической характеристики имеет вид:  При   При   5.2 Модуль жёсткости статической механической характеристики:  5.3 Максимально требуемое значение ЭДС преобразователя, соответствующее:   5.4 Электромеханическая характеристика при   5.5 Установившаяся суммарная ошибка при линейном нарастании:   5.6 Установившееся значение тока якоря при    5.7 Время первого согласования текущего и установленного значения скорости:  5.8 Перерегулирование по скорости:  Рассчитанные электромеханические характеристики представлены на рисунке 5.1 Рисунок 5.1 – Диаграмма зависимости угловой скорости от времени  Для получения графиков переходных процессов воспользуюсь программой MATLAB, построенная при помощи этой программы структурные схемы представлены в приложении 2. В программе по структурной схеме получаю графики изменения угловой скорости, тока и момента, полученные при пуске, изображённые соответственно в приложении 3 и 4. Таблица 5.1 – Аналитика графиков изменения угловой скорости, тока и момента при порожнем и гружёном пусках
6 Расчёт нагрузочной диаграммы электропривода Режим подъема 1. Определим момент инерции двигателей:  3. Максимальный момент механизма в режиме тяги ковша:  4. Момент сил сопротивления:  5. Угловая скорость вала двигателя:  6. Длительность разгона гружёного ковша:  7. Длительность торможения гружёного ковша:  8. Расчётный путь тяги ковша:  где  – длина стрелы. – длина стрелы.9. Путь за период разгона гружёного ковша:  10. Путь за период торможения гружёного ковша:  11. Путь, проходимый гружёным ковшом с установившейся скоростью:  12. Время движения гружёного ковша с установившейся скоростью:  13. Общее время подъёма:  Режим спуска 14. Приведённый момент инерции порожнего ковша:  15. Момент статического сопротивления в режиме тяги порожнего ковша:  16. Длительность разгона порожнего ковша:  17. Длительность торможения порожнего ковша:  18. Путь за период разгона порожнего ковша:  19. Путь за период торможения порожнего ковша:  20. Путь, проходимый порожним ковшом с установившейся скоростью:  21. Время движения порожнего ковша с установившейся скоростью:  22. Общее время подъёма:  По результатам расчётов строим нагрузочную диаграмму и тахограмму электропривода механизма подъёма. 7 Выбор и проверочный расчёт электродвигателя переменного тока для заданного механизма Таблица 7.1 – Расчёт эффективного момента
1. Эффективный момент:  2. Продолжительность включения двигателя:  где      3. Номинальный момент:  4. Номинальная мощность:   Исходя из рассчитанных параметров подбираем асинхронный двигатель: ДАЗО4-400Х-8У1, который имеет следующие характеристики:       Список литературы 1. Ключев В.И. Теория электропривода [Текст]: учебник для вузов, 3-е изд., переработанное и дополненное. Москва: Энергоатомиздат, 2001. – 704 с. 2. Лагунова Ю. А. «Экскаваторы-драглайны» [Текст]: учебно-методическое пособие. Екатеринбург: изд-во УГГГА, 2004. – 107 с. 3. Неклепаев Б. Н., Крючков И. П. «Электрическая часть электростанций и подстанций» [Текст]: справочные материалы для курсового и дипломного проектирования, учебное пособие для вузов – 4-е изд., переработанное и дополненное. Москва: изд-во Энергоатомиздат, 1989. – 608 с. 4. Носырев М.Б., Карякин А. Л. «Расчёт и моделирование САУ главных электроприводов одноковшовых экскаваторов» [Текст]: учебное пособие. Свердловск: изд-во СГИ им В. В. Вахрушева, 1987. – 88 с. |











