Система «Тиристорный преобразователь – двигатель по структуре подчиненно-го регулирования». КурсовиК. Кафедра эпапу пояснительная записка к курсовому проекту по дисциплине Системы управления электроприводами Система Тиристорный преобразователь двигатель по структуре подчиненного регулирования
 Скачать 4.96 Mb. Скачать 4.96 Mb.
|

 Министерство образования и науки Российской Федерации Министерство образования и науки Российской ФедерацииФедеральное государственное бюджетное образовательное Учреждение высшего профессионального образования «Комсомольский-на-Амуре государственный технический университет» Факультет Инженерно-экономический Кафедра ЭПАПУ ПОЯСНИтЕЛЬНАЯ ЗАПИСКА к курсовому проекту по дисциплине «Системы управления электроприводами» Система «Тиристорный преобразователь – двигатель по структуре подчиненного регулирования» Студент группы 0ЭПа-1 _________________ подпись, дата Руководитель проекта ___________________ Суздорф В. И. подпись, дата Нормоконтролёр _______________________ Суздорф В. И. подпись, дата  Содержание1Расчёт и выбор элементов системы электропривода 7 3.1 Расчёт и выбор тиристоров 7 3.3Расчёт уравнительного реактора 9 3.4Расчёт и выбор сглаживающего дросселя 12 3.5Расчёт коэффициентов и постоянных системы 15 4 Выбор датчиков обратных связей 18 5Расчёт параметров регуляторов 20 5.1 Расчет регулятора тока 20 5.2Описание структурной схемы подчинённого регулирования скорости. 23 5.3Расчёт регулятора скорости 25 5.4 Расчёт параметров элементов регуляторов 27 6Проверка системы на устойчивость 32 7Исследование динамических характеристик 34 8Характеристика основных узлов принципиальной схемы. 38 9Заключение 43 Список используемой литературы 44 Введение  Среди проблем, стоящих перед народным хозяйством страны, задачи комплексной механизации и автоматизации технологических процессов, развития производства роботов и манипуляторов, повышения качества, надежности, экономичности и производительности машин занимают важное место. Рассмотренные особенности электропривода позволяют заключить, что решение всех этих важных задач требует дальнейшего совершенствования и развития электрического привода. Среди проблем, стоящих перед народным хозяйством страны, задачи комплексной механизации и автоматизации технологических процессов, развития производства роботов и манипуляторов, повышения качества, надежности, экономичности и производительности машин занимают важное место. Рассмотренные особенности электропривода позволяют заключить, что решение всех этих важных задач требует дальнейшего совершенствования и развития электрического привода.Особенностью развития современного электропривода является интенсивное повышение технологических требований к динамическим и точностным показателям электропривода, расширение и усложнение его функций, связанных с управлением технологическими процессами, и соответствующее возрастание сложности САУ электроприводами. Развитие САУ идет по пути создания систем числового программного управления и расширения использования современной вычислительной техники, создаваемой непосредственно для целей управления на базе микропроцессоров. Необходимость применения аналоговых или микропроцессорных САУ определяется конкретными технологическими требованиями к электроприводам. На данном этапе развития правильное определение задач, которые наиболее эффективно решаются с помощью микропроцессорного управления, весьма важно. В качестве второй особенности данного этапа развития следует указать стремление к унификации элементной базы электропривода, созданию унифицированных комплектных электроприводов путём использования современной микроэлектроники и блочно-модульного принципа. На этой основе уже созданы серии комплектных тиристорных электроприводов постоянного тока, обладающих техническими показателями, удовлетворяющими требованиям широкого круга механизмов. Идет процесс дальнейшего развития и совершенствования таких электроприводов, причем на этих принципах создаются и системы частотного управления электроприводами переменного тока. Выше уже была отмечена общая тенденция к упрощению кинематических цепей машин и механизмов, обусловленная развитием регулируемого индивидуального электропривода. Одним из проявлений этой тенденции является стремление в машиностроении к использованию без редукторного электропривода. Созданы мощные электроприводы прокатных станов, шахтных подъемных машин, основных механизмов экскаваторов, скоростных лифтов, в которых используются тихоходные двигатели, имеющие номинальную частоту вращения 18 - 120 об/мин. Несмотря на повышенные массу и габариты двигателя, применение без редукторных электроприводов по сравнению с редукторными оправдывается их большей надежностью и быстродействием. Электрический привод является крупнейшим потребителем электрической энергии: из всего огромного объема электроэнергии, вырабатываемой в нашей стране, более половины преобразуется в механическую энергию, необходимую для работы машин и механизмов во всех о  траслях народного хозяйства и быту. В связи с этим энергетические показатели как уникальных, так и массовых электроприводов малой и средней мощности имеют важнейшее народнохозяйственное значение. В решении больших топливно-энергетических задач, стоящих перед нашей страной, вопрос рационального, экономного расходования электроэнергии выдвигается на первый план. Соответственно на этом этапе особую остроту приобретает проблема рационального с точки зрения энергопотребления проектирования электроприводов. Эта проблема требует разработки мероприятий, направленных на повышение КПД электроприводов, с одной стороны, и на организацию управления работой машин, исключающую или минимизирующую непроизводительное потребление электроэнергии их электроприводами с другой. Задание на проектирование траслях народного хозяйства и быту. В связи с этим энергетические показатели как уникальных, так и массовых электроприводов малой и средней мощности имеют важнейшее народнохозяйственное значение. В решении больших топливно-энергетических задач, стоящих перед нашей страной, вопрос рационального, экономного расходования электроэнергии выдвигается на первый план. Соответственно на этом этапе особую остроту приобретает проблема рационального с точки зрения энергопотребления проектирования электроприводов. Эта проблема требует разработки мероприятий, направленных на повышение КПД электроприводов, с одной стороны, и на организацию управления работой машин, исключающую или минимизирующую непроизводительное потребление электроэнергии их электроприводами с другой. Задание на проектированиеЦель курсового проектирования: спроектировать систему автоматического регулирования скорости с совместным способом управления группами вентилей со следующими показателями качества: режим работы – программное управление, диапазон регулирования D= 60, ошибка регулирования - 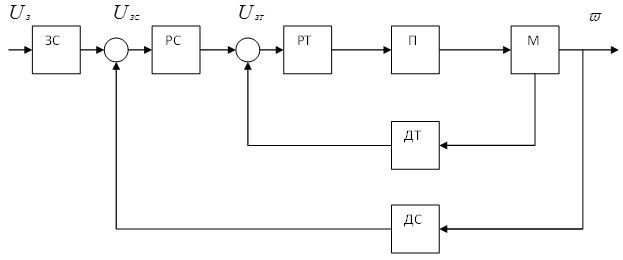 Рисунок 2.1 - Структурная схема ТП – Д Дан электродвигатель: тип ДП92 , тихоходный, компенсированный, режим работы S1. Номинальная мощность: Номинальное напряжение: Номинальный ток: Частота вращения: КПД двигателя: Момент инерции двигателя: |