Курсовая по электроприводу. Электропривод подъема мостового крана
 Скачать 2.12 Mb. Скачать 2.12 Mb.
|

3.3 Выбор датчиков регулируемых координат электроприводаДатчик тока для частотного управления асинхронным двигателем с IR-компенсацией надо выбрать на основе измерения мгновенных значений токов в фазах АД, затем сформировать сигнал действующего значения тока фазы. Выбираем 3 датчика тока производства фирмы «LEM» на основе элементов Холла серии HAS по номинальному току статора (IН=114 А). Основные технические данные датчика тока типа HAS120S/SP1: - Номинальный первичный ток, IPN=120 А; - Диапазон преобразования, ±360 А; - Напряжение питания, +5 В. 4 ОПРЕДЕЛЕНИЕ СТРУКТУРЫ И ПАРАМЕТРОВ УПРАВЛЯЮЩЕГО УСТРОЙСТВАПри регулировании напряжения АД по закону Ψ1= const обеспечивается постоянство модуля жесткости механических характеристик β. Функциональная схема автоматизированного электропривода представлена на рисунке 4.1. 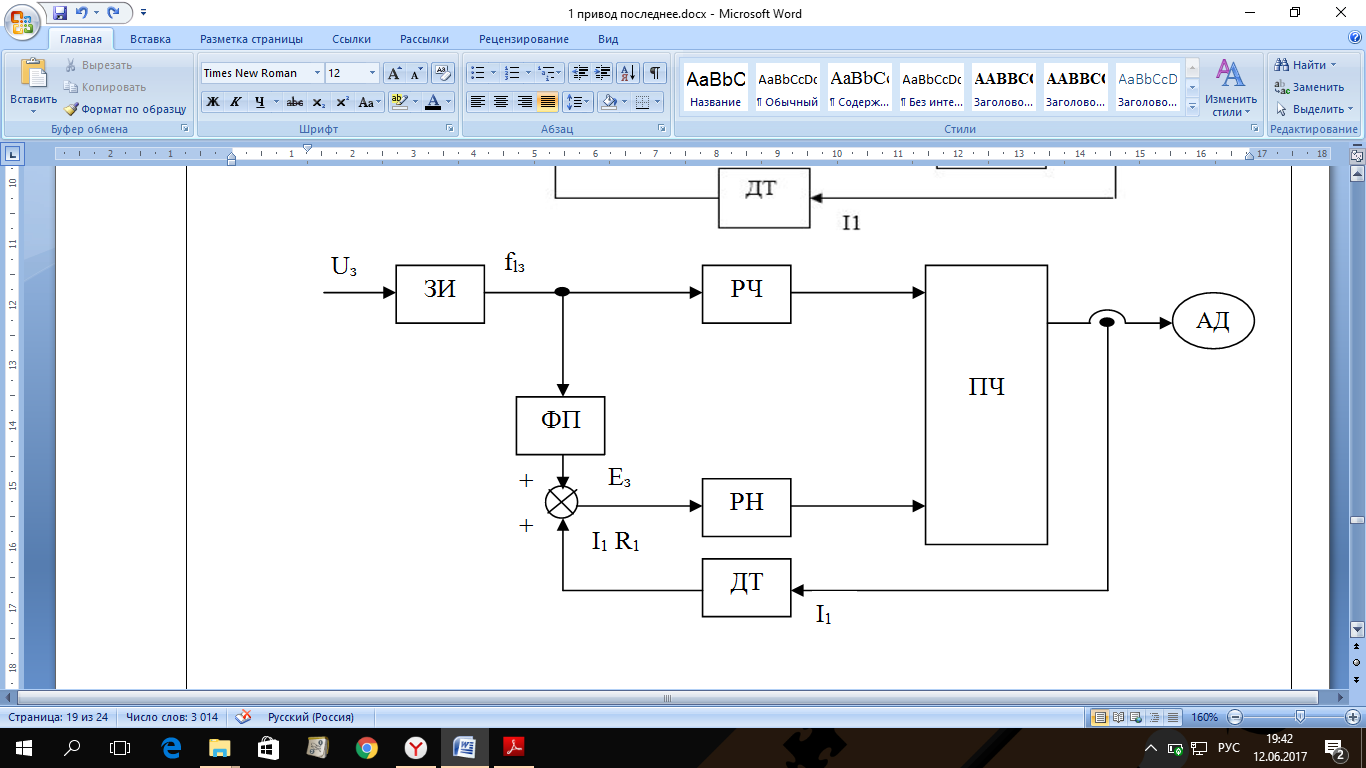 Рисунок 4.1 - Функциональная схема электропривода Таблица № 4.1 Описание элементов функциональной схемы
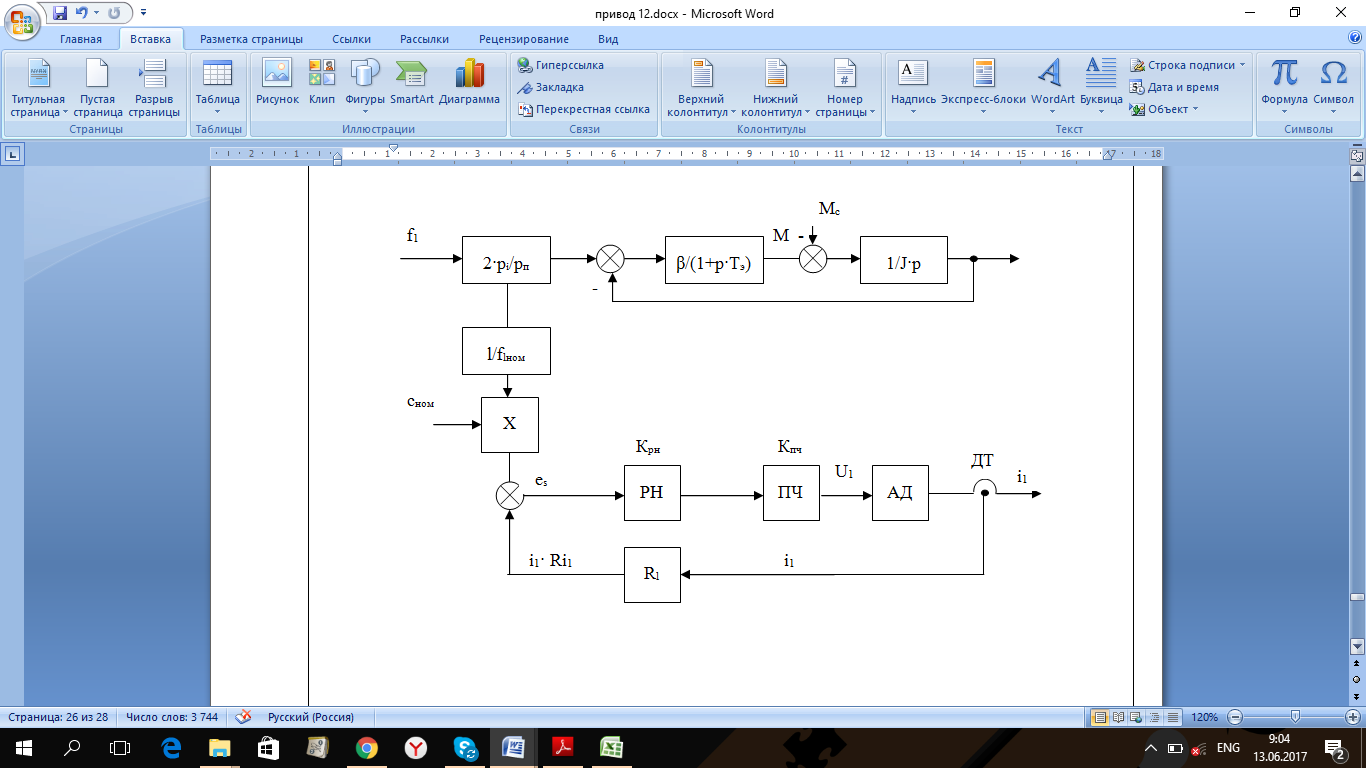 Рисунок 4.1 - Структурная схема САР привода подъема В такой системе САУ должна обеспечить амплитуду выходного напряжения ПЧ: Где, 5 РАСЧЕТ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА5.1 РАСЧЕТ статических характеристик электроприводаПостроим естественную механическую характеристику асинхронного двигателя в четырех квадрантах. Для построения механической характеристики воспользуемся формулой Клосса:  Где, Номинальная угловая скорость Где, Значение Задаваясь значениями S в пределах от -0,001 до 1,099 находим значения По найденным точкам строим механическую характеристику (рисунок 5.1). Значения Для построения искусственной механической характеристики (рисунок 5.2) при частотном управлении на пониженной скорости выражается формулой, требуется посчитать угловую скорость при различной частоте, примем частоты f=6, 12, 24, 36, 48, тогда Где, Где, Для жёсткой характеристики задаемся теми же значениями моментов, что и для естественной и по вышеприведенной формуле определяем Таблица 5.1 Рассчитанные значения
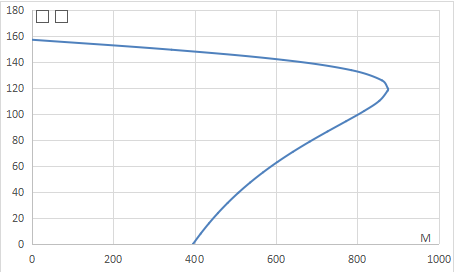 Рисунок 5.1 - График механической характеристики  Рисунок 5.2 - График искусственной характеристики Так как для регулирования скорости применяется ПИ регулятор, который дает нулевую статическую ошибку, поэтому механическая характеристика привода будет абсолютно жесткой 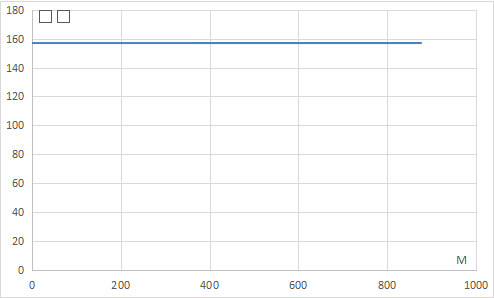 Рисунок 5.3 - График естественной механической характеристики | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||